Практическая. УСТс. Задания на контрольную работу по курсу устс
 Скачать 144 Kb. Скачать 144 Kb.
|

|
| Варианты заданий | А | В | С | D | E | F |
| Вариант 5 | 5 | 5 | 5 | 5 | 5 | 5 |
А.5 Дать определение объекта управления (ОУ)
Объект управления (ОУ) - объект (или система объектов), для которого необходимо достичь желаемые цели управления через выдаваемые на него управляющие воздействия.
В.5 Линеаризуйте уравнение колебания физического маятника длинной L и массой m
Приведите линеаризованное уравнение.
L
Из за относительной простоты получения решения всегда существовала и сейчас существует тенденция свести нелинейное уравнение к линейному операцией, так называемой, линеаризации. Это часто возможно сделать, если принять какое-то опорное состояние и записать уравнения системы в малых отклонениях – вариациях от этого опорного состояния. В предположении малости этих вариаций, поддерживаемых системой, можно получить линеаризованное уравнение системы. Рассмотрим колебания физического маятника.
L
Это нелинейное уравнение относительно рассматриваемой координаты θ , которая является аргументом нелинейной функции sin. Однако, разложим функцию sin(θ) в степенной ряд.
При малых θ – члены θ3 и θ5 гораздо меньше, чем θ и ими можно пренебречь. При
Итак уравнение колебаний маятника
С.5. Найти передаточную функцию замкнутой системы с обратной связью
Wзамк(s)=
b(s)
H(s)=
H(s)=
Передаточная функция замкнутой системы с отрицательной обратной связью.
b(s)
Y(s)=E(s)*G(s)

Передаточная функция замкнутой системы с отрицательной обратной связью равна передаточной функции объекта управления, поделенной на произведение передаточных функций объекта управления и управляющего устройства (передаточной функцией разомкнутой системы), сложенного с единицей.
Можно заметить, что система будет хорошо отслеживать входной сигнал R(s), когда
Тогда
Те же соображения позволяют определить как подавить возмущения, действующие на систему. Необходимо сделать передаточную функцию системы по возмущению
Д.5 Передаточная функция замкнутой системы управления имеет вид
W(s) =
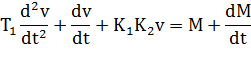
-Записать дифференциальное уравнение, связывающее выходную и входную координаты Z(t) и Y(t)
-Найти и записать характеристическое уравнение.
-Найти корни характеристического уравнения.
-Дать суждение об устойчивости системы
Передаточная функция системы управления имеет вид
W(s) =
Тогда характеристическое уравнение:
Найдем корни характеристического уравнения:
Необходимое, но недостаточное условие устойчивости – все коэффициенты характеристического уравнения должны иметь один знак.
Это условие совпадает.
Достаточное условие устойчивости для характеристического уравнения приводит к соотношению
Это условие совпадает с предыдущим.
Дифференциальное уравнение, описывающее изменение по времени управляемой координаты t , полученное из передаточной функции
Е.5. В системе управления 2 исполнительных органа имеют встроенные ЦВМ и объединены с системной ЦВМ сетью по MILSTD 1553В. Системная ЦВМ является в данной сети контроллером, а ЦВМ исполнительных органов – оконечными устройствами. Определить через какое время выработанные в ЦВМ контроллера команды управления объемом по два слова данных на каждый исполнительный орган поступит на исполнение в исполнительные органы. При этом время передачи командного слова – 20мксек. Время передачи одного слова данных – 20мксек. Время передачи ответного слова(ОС) от оконечного устройства в контроллер – 20мксек.Пауза между окончанием передачи команды + данных и передачей ОС– 12мксек. Время в контроллере между окончанием приема ОС от первого сообщения и началом передачи командного слова на следующее ОУ – 50мксек.
Все сообщения, передаваемые в сети, имеют длину 20 бит и разделяются на три типа: командное слово, данные, ответное слово. В каждом двадцатибитном слове сообщений первые три бита – синхросигнал для вхождения в связь, а последний двадцатый бит – бит четности, для контроля целостности информации. Оставшиеся 16 бит слова данных это - данные. В ответном слове содержится информация об ОУ – его адресе, состоянии, наличии запроса на обслуживание.
В командном слове закодирован адрес ОУ, к которому обращается контроллер и команда, с которой контроллер обращается к ОУ. Команды могут быть нескольких типов:
-передача информации ОУ,
-получение (запрос)информации с ОУ,
-команда для ОУ без информации(например, дай ответное слово)и т.п.
Длительность передачи любого слова на частоте 1 МГГЦ составляет 20 мксек.
Кратко рассмотрим формат трех типов сообщений. Всего в стандарте их шесть.
Кроме этих форматов существует формат группового сообщения, формат передачи данных от ОУ к ОУ, но только по команде котроллера и т.п.
Пауза t2 формируется ОУ после полученного сообщения и должна быть 4-12 мсек. Отсутствие ответного слова через t2>12 мсек воспринимается контроллером как неполучение ОУ направленного ему сообщения.
Пауза t1 формируется контроллером и определяется временем работы его ПО, но она не может быть менее 4мксек.
Максимально число слов данных в сообщении равно 32.
Максимальное число ОУ на линии – 31 + с учетом адреса контроллера, так как общее число адресов устройств интерфейса в сети = 32. Среди команд управления, число которых в стандарте задано 15 (остальные - резервные), имеется команда к ОУ «дай ответное слово».
Если ОУ хочет по собственной инициативе начать передачу, то он этого сделать не может, но у него есть единственная возможность обратить на себя внимание контроллера и в конце концов передать имеющееся у него сообщение. Для этого ОУ в своем ответном слове на команду «дай ответное слово» или любую другую команду в 11 позиции ответного слова должен установить в 1 – бит флага «запрос на обслуживание».
Получив в ответном слове эту информацию, контроллер по собственной логике, заложенной в его ПО может запросить информацию с ОУ командой запроса данных (формат 2). Только после этого ОУ сможет передать свою информацию. Таким образом, ОУ могут проявлять контролируемую инициативу по передаче данных в линию. Забота о периодическом опросе флагов ОУ «запрос на обслуживание» лежит на контроллере, точнее на его ПО прикладного уровня, реализующем логику управления сетью.
Таким образом, передача из контроллера сообщения на 2 различных ОУ из двух слов данных на каждый займёт время
2(КС+12 мксек.+2СД+ ОС+ t1 )= 192 мксек.
Здесь КС, СД, ОС – времена передачи соответственно командного слова, слова данных, ответного слова, равные по 20 мксек.
Данные времена передачи данных применительно к мехатронной СТС являются достаточно малыми ( период повторения решения задачО,1 сек), т.е. сеть не вносит принципиального запаздывания в систему управления СТС.
F5. Поведение системы описывается дифференциальным уравнением
Необходимо получить решение данного уравнения методом Эйлера. Число шагов интегрирования n = 200 , шаг интегрирования
Соотношения метода Эйлера необходимо реализовать либо в Mathcad, либо на любом другом языке программирования.
1.Привести представление данного уравнения в необходимой для решения методом Эйлера форме.
2.Привести график изменения
3.Привести график изменения
1)
 2) график
2) график  3)
3) Поволжский государственный университет телекоммуникаций и
Информатики
Заочный факультет
РЕГИСТРАЦИОННЫЙ № ______
Контрольная работа № _______ Вариант _______
по _____________________________________________________
Студент _________________________________________________
________________________________________________________
Факультет _________ курс ________ шифр __________ гр.______
Работа выслана «_____»_________________ 201__г.
Оценка _______________ Дата _______________201___г.
Подпись преподавателя ___________________