Закон Ома. Работа и мощность в электрической цепи. Закон ДжоуляЛенца
 Скачать 1.79 Mb. Скачать 1.79 Mb.
|

|
4. Реверсирование ад (изменение направления вращения) Реверсирование АД производится изменением порядка чередования фаз на статоре за счет одновременного переключения любых двух фаз. Схема реверсирования АД 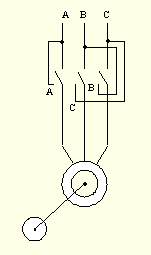 Способы регулирования частоты вращения ад Способы регулирования частоты вращения адАД отличается плохими регулировочными свойствами, поэтому обычно используется в нерегулируемом электроприводе. Однако в настоящее время в связи с широким распространением тиристорных (транзисторных) преобразователей частоты (ТПЧ) всё более широкое распространение получает т.н. частотно-регулируемый электропривод, в котором используется частотное регулирование частоты вращения асинхронного электродвигателя. Частотное регулирование ад Частотное регулирование АД производится путем изменения частоты питающего напряжения (f1 – var), подаваемого на обмотки статора от частотного преобразователя. 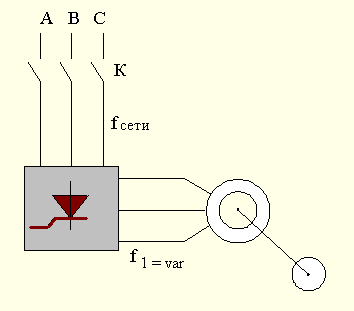 Угловая синхронная частота вращения АД:  При изменении частоты f1 = var пропорционально изменяется частота вращающегося магнитного поля (синхронная частота Для сохранения перегрузочной способности (максимального момента АД) частотное регулирование ведут при условии U1/f1 = const. 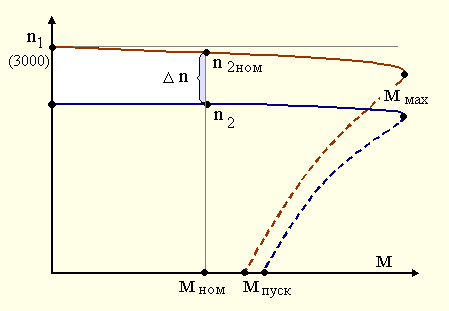 Регулирование обычно ведётся в сторону понижения частоты от f1 ≤ 50 Гц, при этом частота АД также понижается «вниз от номинала» n 2 ≤ n 2ном .. Регулирование плавное, экономичное, диапазон регулирования Δn достаточно большой - примерно n 2 / n 2ном ≈ 1:10 , но способ очень дорогой. Однако, несмотря на высокую стоимость ТПЧ (100-200 $ на 1 кВт), срок окупаемости частотно-регулируемого электропривода обычно составляет 2-3 года. Применение частотно-регулируемого ЭП позволяет экономить за счет оптимизации режима работы технологического оборудования до 30-60% потребляемой ЭЭ и снизить эксплуатационные расходы на 30-50%. Кроме того, при использовании частотно-регулируемого ЭП улучшаются условия пуска АД, повышается плавность разгона (снижаются тепловые, электрические, и ударные механические нагрузки), что увеличивает срок службы электропривода с 10-15 до 20-25 лет. В настоящее время частотно-регулируемый ЭП находит широкое применение в качестве привода насосов и вентиляторов системах тепло-водоснабжения, в качестве привода современных лифтов и др. Полюсное регулирование Осуществляется за счет изменения числа пар полюсов статора p1 = var. В простейшем случае на статоре АД уложено несколько обмоток с различным числом пар полюсов, одна из которых включается в питающую сеть. В более сложных конструкциях статора АД изменение числа пар полюсов p1 = var производится путём переключения секций обмотки с последовательного соединения на параллельное или наоборот. При изменении числа пар полюсов р1 = var обратно пропорционально изменяется частота вращающегося магнитного поля (синхронная частота Недостатки полюсного способа регулирования: регулирование ступенчатое, а также сложное и дорогое устройство статора. 6. Способы электрического торможения ад Для сокращения времени переходного процесса останова АД наряду с механическим торможением часто применяют один из трёх способов электрического торможения. 1) Торможение противовключением В этом способе обмотка статора АД отключается от трёхфазной питающей сети и снова включается в сеть с изменением порядка чередования фаз (см. реверсирование АД). Достоинства: - способ прост и эффективен, торможение практически мгновенное. Недостатки: - очень большой тормозной ток, значительно больший, чем пусковой (см. прямой пуск АД); - опасность реверсирования ЭД. 2) Динамическое торможение Обмотка статора отключается от трёхфазной питающей сети, после чего любые две фазы питающие статор включаются в сеть постоянного тока. Достоинства: - способ прост и достаточно эффективен. Недостаток – требуется источник постоянного тока. 3) Генераторный (рекуперативный) способ с возвратом ЭЭ в питающую сеть Режим генераторного торможения возникает самопроизвольно при условии, когда частота вращения ротора n2 становится больше синхронной частоты АД n1 : n2 > n1. Такой режим возникает, например, при опускании груза, когда под действием его веса частота вращения ротора АД увеличивается и становится больше синхронной. При этом двигатель переходит в генераторный режим, а кинетическая энергия привода превращается в ЭЭ и поступает в питающую сеть. Электромагнитный момент двигателя становится тормозящим, а спуск груза несколько притормаживается, но двигатель продолжает вращаться с частотой n2 > n1 29. Электрический привод. Структура и преимущества электропривода. Электродвигатели постоянного тока, их преимущества и недостатки. Устройство и принцип работы. Электрический привод (ЭП) – это электромеханическая система, предназначенная для преобразования ЭЭ в механическую, управление потоком этой энергии и содержащая: - преобразователь ЭЭ (ПЭЭ) - служит для изменения параметров ЭЭ (трансформаторы, выпрямители, частотные преобразователи); - электромеханический преобразователь (ЭМП) - преобразует электрическую энергию в механическую (электромагнитные и электромашинные преобразователи - различные типы двигателей); - преобразователь механической энергии (ПМЭ) - служит для изменения параметров механической энергии (редукторы, кулачковые механизмы, кулисные механизмы и др.); - система управления ЭП (СУЭП) - управляет режимом работы ЭП (включение, выключение, реверсирование, торможение, изменение частоты вращения ЭП); - рабочая машина (РМ) или исполнительный механизм (ИМ) - преобразует механическую энергию в требуемую работу. Структурная схема электропривода 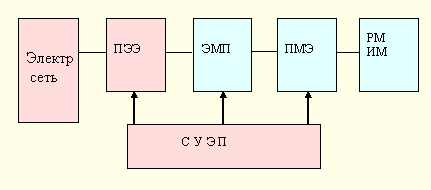 В настоящее время на получение механической энергии в электроприводе расходуется около 80 % электрической энергии, потребляемой в промышленности, или около 60 % всей вырабатываемой электрической энергии. Широкое распространение электропривода связано с такими его преимуществами, как 1. Простота подвода и распределения электрической энергии; 2. Высокая надежность, безопасность и экономичность электрических двигателей; 3. Простота и удобство обслуживания и эксплуатации электрических двигателей, управления, контроля и автоматизации работы электропривода; 4. Широкий выбор типов, конструктивных исполнений и мощностей электрических двигателей; 5. Широкий диапазон регулирования частоты вращения и хорошие регулировочные свойства электрических двигателей; 6. Высокая экологическая чистота производства при использовании электропривода. Машины постоянного тока, как и другие электрические машины, обладают свойством обратимости и могут работать в качестве электродвигателей и генераторов. Двигатели постоянного тока используются для преобразования электрической энергии постоянного тока в механическую энергию и широко применяются для привода металлорежущих станков, прокатных станов, роликовых транспортеров, подъемно-транспортных машин, экскаваторов, в электрифицированном транспорте и т.д. Конструкция двигателей постоянного тока сложнее и их стоимость выше, чем асинхронных двигателей. Однако в связи с широким применением автоматизированного электропривода и тиристорных преобразователей, позволяющих питать электродвигатели постоянного тока регулируемым напряжением от сети переменного тока, эти двигатели широко используются в различных отраслях народного хозяйства. Двигатели постоянного тока имеют хорошие пусковые и регулировочные свойства, высокую перегрузочную способность и позволяют получать как жесткие, так и мягкие механические характеристики, поэтому применяются в регулируемом электроприводе, когда требуется высокое качество управления технологическим процессом. Преимущества двигателей постоянного тока: - хорошие пусковые свойства – большой пусковой момент; - хорошие регулировочные свойства – простота, большой диапазон; - высокая перегрузочная способность; - широкий выбор механических характеристик. Недостатки двигателей постоянного тока: - двигатели постоянного тока сложнее по конструкции и их стоимость выше, чем асинхронных двигателей; - наличие щеточно-коллекторного аппарата, который требует тщательного ухода в эксплуатации и снижает надёжность работы машины; - использование двигателей постоянного тока связано с повышенными эксплуатационными расходами; - двигатели постоянного тока обладают повышенной взрыво-пожароопасностью вследствие искрообразования на коллекторе; - для питания двигателя постоянного тока требуется специальный источник постоянного тока (выпрямитель), поскольку основной системой электроснабжения промышленных предприятий является трёхфазная система переменного тока. Устройство двигателя постоянного тока Конструктивно двигатель постоянного тока состоит из двух основных частей, разделённых тонким воздушным зазором 0,3 - 0,5 мм: 1. Неподвижная часть - статор или индуктор; 2.Вращающаяся часть - ротор или якорь. Особенностью конструкции машин постоянного тока является щеточно-коллекторный узел, служащий для поддержания скользящего электрического контакта неподвижной внешней сети постоянного тока с вращающейся обмоткой якоря. Устройство двигателя постоянного тока: 1- корпус (станина); 2 - главный полюс; 3 - катушки обмотки возбуждения; 4 - сердечник якоря; 5 - обмотка якоря; 6 - коллектор; 7 - щётки; 8 - вентилятор; 9 - подшипниковый щит. 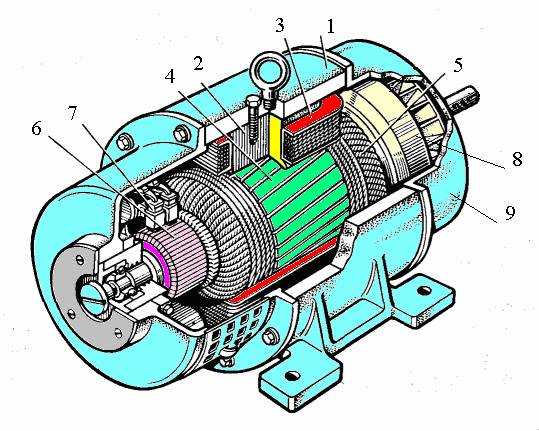 Статор 1 (индуктор – неподвижная часть машины). Станина (статор или корпус двигателя) литой или сварной, из чугуна или стали выполняется в виде полого цилиндра. На станине устанавливаются полюсы и подшипниковые щиты, в которых закрепляются подшипники вала якоря. Станина является частью магнитопровода (ярмом) машины и обеспечивает его замкнутость. На внутренней поверхности статора крепятся болтами главные полюсы 2 с полюсными наконечниками, которые служат для равномерного распределения магнитной индукции в зазоре между полюсами и якорем. Наконечники главных полюсов выполняются шихтованными - из тонких изолированных стальных штампованных пластин толщиной 0,35 - 0,5 мм, так как при вращении зубчатого якоря из-за пульсаций магнитного потока в полюсных наконечниках возникают вихревые токи и соответственно потери мощности. Однако по технологическим условиям обычно выполняют шихтованным весь полюс. На главных полюсах расположены катушки обмотки возбуждения 3, выполненные из медного обмоточного провода. При включении обмотки возбуждения в сеть постоянного тока в статоре двигателя создаётся постоянный магнитный поток возбуждения Ф В . Внутри статора между главными полюсами расположены узкие дополнительные (добавочные) полюсы с обмоткой, которые служат для улучшения коммутации и уменьшения искрения на коллекторе двигателя, а так же для коррекции его механической характеристики. Якорь 4 (ротор - вращающаяся часть машины). Современные машины постоянного тока имеют зубчатый якорь барабанного типа. Сердечник якоря представляет собой цилиндр (барабан) 4, набранный из тонких изолированных листов электротехнической стали толщиной 0,5 мм. На наружной поверхности якоря имеются пазы, в которые уложена обмотка якоря 5 – так называемая барабанная обмотка. Обмотка якоря изготовляется из медного обмоточного провода круглого или прямоугольного сечения и состоит из отдельных, заранее намотанных катушек - секций, которые обматываются изоляционными лентами и укладываются в пазы сердечника якоря. Катушки (секции обмотки) могут соединяться между собой последовательно или параллельно, образуя обмотку якоря в основном двух типов: петлевую или волновую. Петлевую обмотку можно получить, если соединить соседние секции так, чтобы их боковые стороны находились под одним и тем же магнитным полюсом индуктора. Если же соседние секции соединить так, чтобы их боковые стороны были расположены под разными магнитными полюсами, то получается волновая обмотка. Обмотка якоря является замкнутой и выводы секций обмотки припаиваются к пластинам коллектора 6, расположенного на валу двигателя. Коллектор 6 представляет собой цилиндр, набранный из пластин твёрдотянутой меди, изолированных друг от друга и от вала и закреплённых на стальной втулке на валу двигателя. В качестве изоляции между коллекторными пластинами используется прокладки из слюды – миканита или специальных пластмасс толщиной 0,5 - 2 мм в зависимости от размера коллектора и рабочего напряжения машины. Как показала практика напряжение между соседними коллекторными пластинами не должно превышать 40 В и это является одной из причин, почему машины постоянного тока обычно изготовляются на низкое напряжение до 500 В. Коллектор является самой ненадёжной частью электрической машины и требует постоянного осмотра и ухода. К коллектору с помощью пружин прижимаются неподвижные медно-графитовые щётки 7 для поддержания скользящего электрического контакта вращающейся обмотки якоря с неподвижной внешней сетью постоянного тока. Крепление машины к фундаменту, специальным салазкам или металлоконструкции осуществляется с помощью лап, а иногда корпус некоторых машин снабжается для крепления специальными фланцами. В зависимости от способа включения обмотки возбуждения (ОВ) относительно сети и якоря (Я), различают двигатели постоянного тока c независимым возбуждением (ОВ к якорю не подключена, а) и двигатели постоянного тока с параллельным (б), последовательным (в) и смешанным (г) возбуждением. Принцип работы двигателя постоянного тока Принцип работы двигателя постоянного тока основан на использовании явления электромагнитного взаимодействия (правило левой руки). Для запуска двигателя постоянного тока обе его обмотки – обмотка возбуждения (ОВ) и обмотка якоря (ОЯ) с помощью рубильника, пускателя или другой пусковой аппаратуры включается в питающую сеть постоянного тока на номинальное напряжение U = U ном . Протекающий по обмотке возбуждения ток возбуждения I В создаёт в статоре магнитный поток возбуждения Ф В , пронизывающий обмотку якоря. Протекающий по обмотке якоря ток якоря I Я взаимодействует с магнитным потоком возбуждения статора Ф В , в результате чего возникают электромагнитные силы F, действующие на проводники якоря и создающие вращающий электромагнитный момент М = cM Ф В I Я . NB. cM - константа момента, определяемая конструкцией электродвигателя. Под действием вращающего электромагнитного момента М якорь двигателя приходит во вращение и по окончании разгона ротор вращается с частотой n = ( U – R Я I Я ) / сЕ Ф В . NB. сЕ - константа ЭДС, определяемая конструкцией электродвигателя; RЯ IЯ - падение напряжения в обмотке якоря. 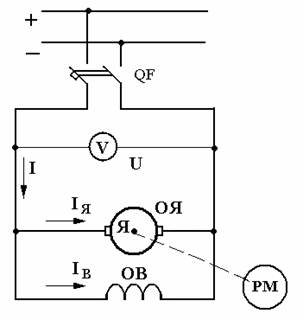 При вращении ротора двигателя проводники обмотки якоря пересекают магнитные силовые линии потока возбуждения статора Ф В в результате чего в обмотке якоря наводится ЭДС (правило правой руки) При вращении ротора двигателя проводники обмотки якоря пересекают магнитные силовые линии потока возбуждения статора Ф В в результате чего в обмотке якоря наводится ЭДС (правило правой руки)Е = сЕ Ф В n . Наведённая в обмотке якоря ЭДС E направлена против приложенного к якорю напряжения (противо-ЭДС) и работа двигателя описывается уравнением электрического равновесия U = E + RЯ IЯ . При этом ток, потребляемый якорем двигателя из сети, или рабочий ток двигателя определяется уравнением IЯ = (U - E)/ RЯ Электрическая схема двигателя постоянного тока с параллельным возбуждением (РМ - рабочая машина) 30. Основные характеристики электродвигателей постоянного тока. Способы пуска и регулирования частоты вращения. Реверсирование и способы электрического торможения электродвигателей постоянного тока. Основные характеристики двигателя постоянного тока с параллельным возбуждением Свойства двигателей постоянного тока в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с независимым, параллельным, последовательным и смешанным возбуждением. В настоящее время в промышленности наиболее широкое применение получили двигатели с параллельным возбуждением. В двигателе с параллельным возбуждением обмотка возбуждения подключена к питающей сети параллельно с обмоткой якоря. В цепь обмотки возбуждения последовательно включается регулировочный реостат RРР, а в цепь якоря - пусковой RПР или регулировочный R* реостат. Характерной особенностью двигателя является то, что ток возбуждения IB не зависит от тока якоря IЯ (тока нагрузки), т. е. при неизменном сопротивлении в цепи обмотки возбуждения, ток возбуждения постоянен IB = const. Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки Ф = ФВ = const. |