Материалы для подготовки к экзамену по электротехнике. Закон Ома. Работа и мощность в электрической цепи. Закон ДжоуляЛенца
 Скачать 2.39 Mb. Скачать 2.39 Mb.
|

|
Структурная схема электропривода 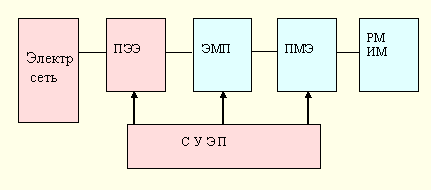 В настоящее время на получение механической энергии в электроприводе расходуется около 80 % электрической энергии, потребляемой в промышленности, или около 60 % всей вырабатываемой электрической энергии. Широкое распространение электропривода связано с такими его преимуществами, как 1. Простота подвода и распределения электрической энергии; 2. Высокая надежность, безопасность и экономичность электрических двигателей; 3. Простота и удобство обслуживания и эксплуатации электрических двигателей, управления, контроля и автоматизации работы электропривода; 4. Широкий выбор типов, конструктивных исполнений и мощностей электрических двигателей; 5. Широкий диапазон регулирования частоты вращения и хорошие регулировочные свойства электрических двигателей; 6. Высокая экологическая чистота производства при использовании электропривода. ТЕПЛОВЫЕ РЕЖИМЫ РАБОТЫ И НОМИНАЛЬНАЯ МОЩНОСТЬ ДВИГАТЕЛЯ 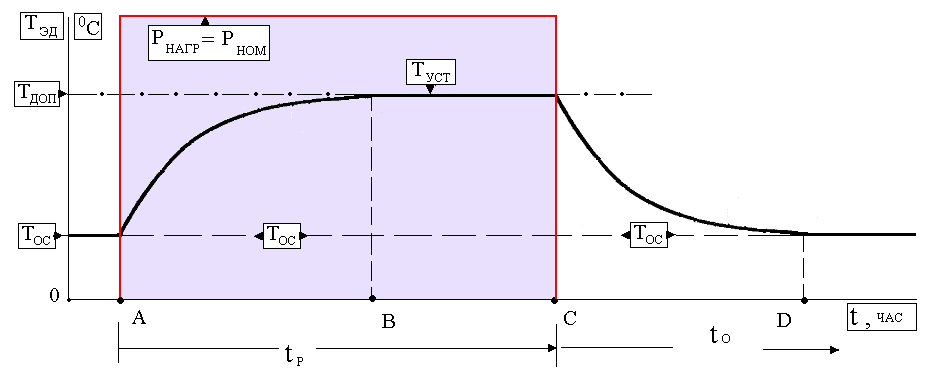 Рис.1. Нагрузочная диаграмма и график зависимости температуры электродвигателя при длительном режиме работы с постоянной номинальной нагрузкой (т. А - включение нагрузки РНАГР = Р НОМ ; т. В – установление теплового равновесия при Т УСТ = const ; т. С - отключение нагрузки РНАГР = 0 ; т. D - установление теплового равновесия при ТЭД = Т ОС ; t Р - продолжительность работы двигателя с нагрузкой; t О - продолжительность останова двигателя) При кратковременной работе двигателя тепловое равновесие не наступает, его температура не достигает установившегося значения ТЭД < Т УСТ = const и в таком случае двигатель постоянно работает в неустановившихся тепловых режимах – либо нагрева, либо остывания (рис. 2). 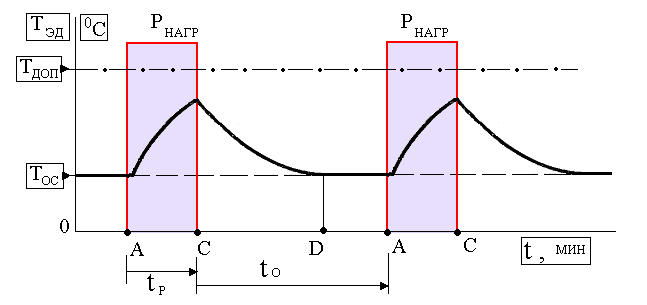 Рис. 2. Нагрузочная диаграмма и график зависимости температуры электродвигателя при кратковременном режиме работы. t Р - продолжительность работы двигателя с нагрузкой; t О - продолжительность останова двигателя Во избежание перегрева и резкого сокращения срока службы электродвигателя для характеристики его теплового режима работы водится понятие допустимой температуры электродвигателя Т ЭД. ДОП , которая в каждом случае определяется качеством (классом нагревостойкости) используемой изоляции его обмоток. Из условия обеспечения работы электродвигателя в допустимом тепловом режиме проектируется и выбирается его номинальная мощность Р НОМ : РНАГР = Р НОМ Т УСТ = Т ЭД. ДОП . Номинальная мощность электродвигателя Р НОМ - это наибольшая полезная механическая мощность на валу электродвигателя, при которой обеспечиваются высокие технико-экономические показатели его работы и допустимый тепловой режим (без перегрева), гарантирующий длительный срок службы электродвигателя в течение 15 – 20 лет. В зависимости от соотношения фактической мощности нагрузки на валу электродвигателя Р НАГР и его номинальной мощности Р НОМ , т. е. в зависимости от коэффициента загрузки β = Р НАГР / Р НОМ , различают три нагрузочных режима: 1. Номинальный режим: РНАГР = Р НОМ β = 1 характеризуется высокими технико-экономическими показателями работы и обеспечивает длительный срок службы электродвигателя. 2. Режим недогрузки: РНАГР < Р НОМ β < 1 характеризуется более низкими технико-экономическими показателями работы и не рекомендуется для длительной работы. 3. Режим перегрузки: РНАГР > Р НОМ β > 1 характеризуется пониженными технико-экономическими показателями работы и, кроме того, приводит к перегреву электродвигателя, что увеличивает опасность аварийного отключения, резко снижает срок его службы и поэтому практически не допускается. Выбор мощности электродвигателя для различных нагрузочных режимов Двигатели производственных механизмов могут работать в различных нагрузочных режимах, т. е. с различной по характеру нагрузкой – постоянной или изменяющейся (переменной) по величине, с разным соотношением времени работы и останова (паузы), с различной частотой пуска, реверсирования, торможения и др. В зависимости от теплового режима работы двигателя и характера нагрузки различают следующие наиболее распространенные нагрузочные режимы: S1 - длительный или продолжительный; S2 – кратковременный; S3 - повторно- кратковременный. Для определения характера нагрузки и режима работы производственного механизма строятся так называемые нагрузочные диаграммы, представляющие зависимости момента или мощности нагрузки на валу двигателя от времени, т. е. зависимости M НАГР (t) или P НАГР (t). Если задана рабочая ( полезная) мощность производственного механизма Р МЕХ, то для приведения ее к мощности на валу двигателя необходимо учесть КПД производственного механизма ( М) и системы механической передачи от механизма к двигателю ( П): Р НАГР = Р МЕХ / М П . S1. Длительный (продолжительный) режим работы — это такой режим, в котором двигатель длительно работает с постоянной нагрузкой РНАГР = const ( рис.1) или с изменяющейся ( переменной) во времени РНАГР = variable (рис.3) и установившаяся температура двигателя за время его работы достигает допустимого значения Т УСТ = Т ДОП. Этот режим характерен для приводов рольгангов прокатных станов, конвейеров, эскалаторов, дымососов, вентиляторов, насосов, компрессоров, мешалок, дробилок, мельниц и др., длительность работы которых составляет часы, сутки, недели. При работе в длительном режиме с постоянной нагрузкой по заданной мощности нагрузки на валу двигателя Р НАГР производят выбор номинальной мощности и марки двигателя при заданной частоте вращения по каталогу двигателей серии ПВ –100 ( рассчитанных на длительную работу) по условию:РЭД НОМ = Р НАГР . Выбранный по этому условию двигатель будет работать в допустимом тепловом режиме и тем самым обеспечит нормальную длительную работу электропривода. При этом дополнительная проверка двигателя на пусковую и перегрузочную способность при постоянной нагрузке не проводится. Если в каталоге нет двигателя с такой номинальной мощностью, то выбирают двигатель с ближайшей большей номинальной мощностьюРЭД НОМ > Р НАГР . При работе в длительном режиме с переменной нагрузкой (рис.3) выбор номинальной мощности двигателя обычно проводится наиболее простым методом эквивалентной мощности: 1. По нагрузочной диаграмме определяется эквивалентная мощность нагрузки на валу двигателя: 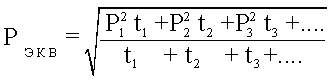 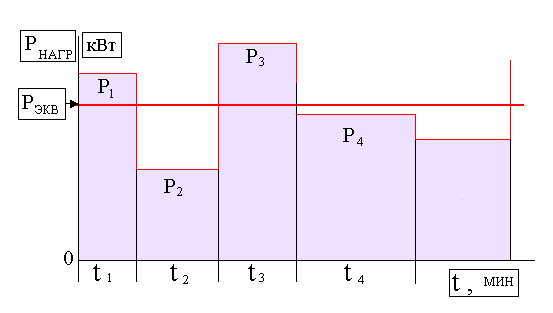 Рис.3. Нагрузочная диаграмма электродвигателя при длительном режиме работы с переменной нагрузкой 2. По каталогу двигателей серии ПВ –100 (рассчитанных на длительную работу) выбирают номинальную мощность и типоразмер (марку) двигателя при заданной частоте вращения по условию: РЭД НОМ = Р ЭКВ . Если в каталоге нет двигателя с такой номинальной мощностью, то выбирают двигатель с ближайшей большей номинальной мощностьюРЭД НОМ > Р НАГР . 3. При работе двигателя с переменной нагрузкой обязательно необходимо проводить проверку выбранного двигателя на перегрузочную способность. Двигатели постоянного тока проверяются на перегрузку по току и должны удовлетворять следующему условию: I НОМ ≥ I МАХ НАГР / ( 2 - 2,5) . Асинхронные двигатели проверяются на перегрузку по пусковому и максимальному моментам и с учетом коэффициентов запаса должны удовлетворять следующим условиям: 1. λ П М НОМ ≥ К П М П НАГР ; 2. λ М М НОМ ≥ К М М М НАГР , здесь М НОМ - номинальный момент асинхронного двигателя, λ П и λМ - кратность пускового и максимального моментов двигателя, К П и К М - коэффициент запаса по пусковому и максимальному моментам (обычно принимают равным К = 1,2 - 1,3 ), М П НАГР и М М НАГР - пусковой и максимальный моменты нагрузки (определяются по заданной нагрузочной диаграмме двигателя по формуле : М = Р / Ω ). В случае если выбранный двигатель не проходит по перегрузочной способности, то выбирают следующий за ним двигатель с большей номинальной мощностью и снова проводят проверку этого двигателя на перегрузочную способность. S2 . КРАТКОВРЕМЕННЫЙ РЕЖИМ РАБОТЫ - это такой режим, в котором кратковременная работа двигателя с нагрузкой чередуется с длительными остановами, при этом за время рабочего периода его температура не достигает допустимого значения Т ЭД < Т ДОП , а за время останова снижается до температуры среды ТЭД = Т ОС (рис.2). Этот режим характерен для приводов разводных мостов, шлагбаумов, задвижек, заслонок, шиберов и др. Для работы в этом режиме выпускаются двигатели специальной серии (так называемые крановые двигатели), рассчитанные на большие кратковременные электрические и механические перегрузки при работе с номинальной мощностью в течение стандартной длительности рабочего периода t СТАНД = 15, 30, 60 и 90 мин. Выбор номинальной мощности и типоразмера (марки) двигателя при заданной частоте вращения проводится по каталогу двигателей специальной серии по следующим условиям: РЭД НОМ ≥ Р НАГР , при продолжительности работы двигателя t Р ≥ t СТАНД . Дополнительная проверка выбранного двигателя на пусковую и перегрузочную способность не проводится. S3. ПОВТОРНО- КРАТКОВРЕМЕННЫЙ РЕЖИМ РАБОТЫ — это такой режим, при котором работа двигателя характеризуется цикличностью, т. е. периодическим чередованием периодов работы двигателя и его остановов. При этом за время рабочих периодов его температура не достигает допустимого значения Т ЭД < Т ДОП , а за время останова не снижается до температуры среды ТЭД > Т ОС при допустимой продолжительности цикла t Ц не более 10 минут (рис.4). 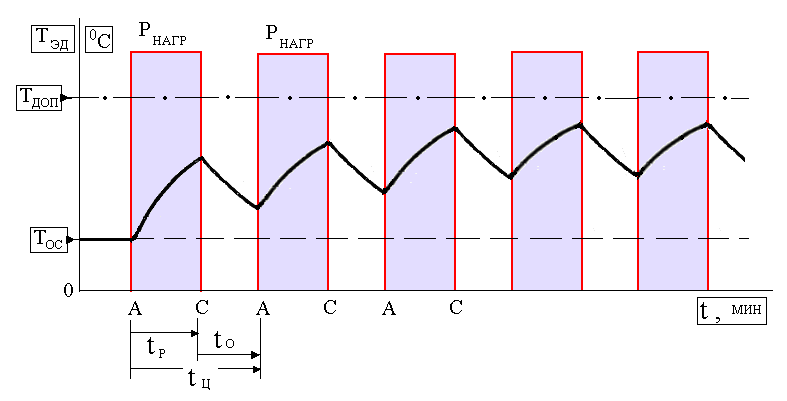 Рис. 4. Нагрузочная диаграмма и график зависимости температуры электродвигателя при повторно-кратковременном режиме работы t Р - продолжительность работы двигателя с нагрузкой; t О - продолжительность останова двигателя, t Ц - продолжительность цикла ( не более 10 мин)) Этот режим характерен для приводов кузнечно-прессового оборудования, подъемно-транспортных устройств, некоторых видов станочного оборудования и др. Повторно-кратковременный режим характеризуется относительной продолжительностью рабочего периода в цикле - продолжительностью включения (ПВ) - определяемой как выраженное в процентах отношение времени работы двигателя с нагрузкой t Р к продолжительности цикла t Ц : Для работы в этом режиме выпускаются двигатели специальной серии для повторно-кратковременной работы со стандартными значениями продолжительности включения: ПВ 15, 25, 40 и 60 % . Если же продолжительность цикла t Ц превышает 10 минут и в случае если ПВ > 60 % - выбирают двигатель длительного режима серии ПВ 100 , а если ПВ < 10 - выбирают двигатель крановой серии кратковременного режима. В случаях сложного характера нагрузочной диаграммы ( рис. 5) выбор номинальной мощности двигателя обычно проводится наиболее простым методом эквивалентной мощности :
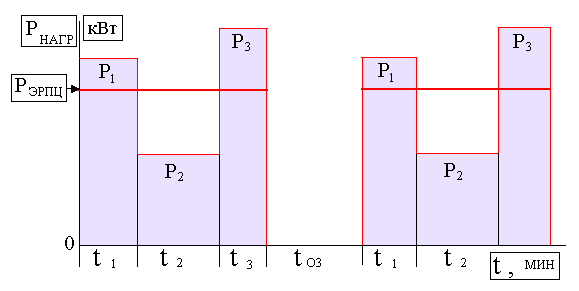 Рис. 5. Нагрузочная диаграмма электродвигателя при повторно-кратковременном режиме работы t i - продолжительность работы двигателя с нагрузкой P i ; t О i - продолжительность останова двигателя; t Ц = (t i + t О i ) - продолжительность цикла ( не более 10 мин) ) 2. Определяется фактическая продолжительность включения нагрузки:  3. Выбор номинальной мощности и марки двигателя при заданной частоте вращения проводится по каталогу двигателей серии ПВ 15, 25, 40, 60 по следующим условиям: при совпадении продолжительности включения ПВ НАГР = ПВ СТАНД выбирают : РЭД НОМ = Р ЭРПЦ . Если в каталоге нет двигателя с такой номинальной мощностью, то выбирают двигатель с ближайшей большей номинальной мощностьюРЭД НОМ > Р ЭРПЦ. 4. Если фактическая продолжительность включения нагрузки отличается от стандартного значения ПВ НАГР ≠ ПВ СТАНД , то необходимо пересчитать эквивалентную мощность нагрузки за рабочий период цикла Р ЭРПЦ на ближайшее большее стандартное значение ПВ*СТАНД :  . .После этого выбор номинальной мощности и типоразмера (марки) двигателя при заданной частоте вращения проводится по каталогу двигателей серии ПВ 15, 25, 40, 60 по следующим условиям: при стандартной продолжительности включения ПВ* СТАНД выбирают: РЭД НОМ = Р* ЭРПЦ . Если в каталоге нет двигателя с такой номинальной мощностью, то выбирают двигатель с ближайшей большей номинальной мощностьюРЭД НОМ > Р* ЭРПЦ. 5. При работе двигателя с переменной нагрузкой обязательно необходимо проводить проверку выбранного двигателя на перегрузочную способность. Двигатели постоянного тока проверяются на перегрузку по току и должны удовлетворять следующему условию: I НОМ ≥ I МАХ НАГР / ( 2 - 2,5) . Асинхронные двигатели проверяются на перегрузку по пусковому и максимальному моментам и с учетом коэффициентов запаса должны удовлетворять следующим условиям: λ П М НОМ ≥ К П М П НАГР ; λ М М НОМ ≥ К М М М НАГР , здесь М НОМ - номинальный момент асинхронного двигателя, λ П и λМ - кратность пускового и максимального моментов двигателя, К П и К М - коэффициент запаса по пусковому и максимальному моментам (обычно принимают равным К = 1,2 - 1,3 ), М П НАГР и М М НАГР - пусковой и максимальный моменты нагрузки (определяются по заданной нагрузочной диаграмме двигателя по формуле : М = Р / Ω ). В случае, если выбранный двигатель не проходит по перегрузочной способности, то выбирают следующий за ним двигатель с большей номинальной мощностью и снова проводят проверку этого двигателя на перегрузочную способность. Правильный выбор мощности двигателя по приведенным выше методикам определяет режим его работы в условиях допустимого нагрева и является одним из основных условий обеспечения надежной работы электропривода с высокими технико-экономическими показателями в течение 15 – 20 - летнего срока эксплуатации без капитального ремонта. 27. Применение различных типов электродвигателей в электроприводе. Сравнительные характеристики и области применения. Трехфазные асинхронные электродвигатели. Их преимущества и недостатки. Устройство и принцип работы. Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надежную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и др. При выборе электрического двигателя для привода производственного механизма, в общем, руководствуются следующими рекомендациями: 1. Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления. 2. Исходя из экономических соображений, выбирают наиболее простой, экономичный и надежный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость. 3. Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты. Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надежность и экономичность работы и длительность срока службы двигателя, но в целом технико-экономические показатели всего электропривода. Из всех типов электрических двигателей общепромышленного применения таким требованиям в наибольшей степени отвечают асинхронные двигатели с короткозамкнутым ротором (АДКЗ). Эти двигатели обычно питаются непосредственно от трехфазной сети и являются самыми простыми по конструкции, наиболее надежными в эксплуатации, практически не требуют обслуживания и при одинаковой мощности имеют наименьшие массу, габаритные размеры и стоимость. По этой причине асинхронные двигатели с короткозамкнутым ротором нашли самое широкое применение во многих отраслях промышленности для приводов различных механизмов: конвейеров, транспортеров, подъемных и поворотных механизмов, толкателей, заслонок, насосов, вентиляторов, компрессоров и т. д. Однако эти двигатели имеют два существенных недостатка: сложность плавного регулирования частоты вращения и высокая кратность (4 - 6) пускового тока по отношению к номинальному. Поэтому двигатели с короткозамкнутым ротором применяются при относительно небольшой частоте включений в нерегулируемом электроприводе малой и средней мощности ( до 50 – 100 кВт) , когда не требуется плавного регулирования частоты вращения или когда может использоваться ступенчатое регулирование (многоскоростные двигатели с изменяемым числом пар полюсов). В настоящее время резко возрос интерес к использованию простых, дешевых и экономичных асинхронных двигателей с короткозамкнутым ротором в частотно-регулируемом электроприводе, в котором плавность регулирования и широкий диапазон достигается за счет питания двигателя от тиристорного (транзисторного) преобразователя частоты (ТПЧ). Кроме того, частотно-регулируемый привод заметно улучшает пусковые свойства двигателя – снижает пусковой ток и обеспечивает плавный запуск двигателя, резко снижает электрические и механические ударные нагрузки, поэтому несмотря на высокую стоимость частотно-регулируемый привод все шире применяется в системах тепло-водоснабжения для привода насосов, вентиляторов, в лифтовом хозяйстве и др. Кроме асинхронных двигателей с короткозамкнутым ротором часто используются асинхронные двигатели с фазным ротором (АДФР), которые позволяют в достаточном диапазоне осуществлять плавное регулирование частоты вращения, но отличаются более сложной конструкцией и имеют значительно большие относительные массы, габариты и стоимость. Кроме того, эти двигатели уступают асинхронным двигателям с короткозамкнутым ротором в простоте управления и надежности в работе, однако обладают хорошими пусковыми свойствами, т. к. с помощью реостата, включенного в роторную цепь, позволяют уменьшить пусковой ток и одновременно увеличить пусковой момент. Этот тип двигателей широко используются при работе в напряженных режимах с частыми пусками и остановами - в механизмах подъемных устройств, конвейеров, транспортеров и др., требующих плавного пуска и регулирования скорости перемещения. Другой весьма распространенный в промышленности тип машин переменного тока - синхронные двигатели – отличаются сложной конструкцией и высокой стоимостью, практически не регулируются, однако обладают высокими экономическими характеристиками и применяются в нерегулируемом электроприводе большой мощности (более 50 – 100 кВт) для привода мощных компрессоров, насосов, вентиляторов, дымососов. В ряде случаев производственные механизмы требуют глубокого и плавного регулирования частоты вращения, высокого качества переходных процессов, больших пусковых и тормозных моментов. В этих случаях при соответствующем технико-экономическом обосновании чаще всего применяются различные типы двигателей постоянного тока, питающихся от преобразователей переменного тока. В подъемных установках и кранах используются чаще всего двигатели последовательного или смешанного возбуждения, имеющие большой пусковой момент и наиболее подходящую характеристику. Двигатели постоянного тока независимого возбуждения используются в автоматизированных электроприводах, когда необходимо глубокое регулирование частоты вращения при высоком качестве переходных процессов. Асинхронный двигатель (АД) – это электрическая машина, предназначенная для преобразования ЭЭ в механическую, работа которой основана на использовании вращающегося магнитного поля (ВМП), и частота вращения которой n2 несколько меньше, чем синхронная частота вращения ВМП n1 (n2 < n1). |