Материалы для подготовки к экзамену по электротехнике. Закон Ома. Работа и мощность в электрической цепи. Закон ДжоуляЛенца
 Скачать 2.39 Mb. Скачать 2.39 Mb.
|

|
Пуск ДПТ при пониженном напряжении Пуск при пониженном напряжении применяется для пуска двигателей средней и большой мощности с целью снижения пускового тока и устранения связанных с этим недостатков прямого пуска. При этом способе обмотка возбуждения при выведенном регулировочном реостате RРР = 0 включена на номинальное напряжение, а на обмотку якоря в момент пуска подается от регулируемого источника питания пониженное по сравнению номинальным напряжение ΔU < Uном . В процессе разгона двигателя напряжение на якоре плавно повышают и после окончания пуска якорь двигателя подключается на номинальное напряжение питающей сети U = Uном и двигатель выходит на естественную рабочую характеристику. Такой способ сложен и дорог, однако при этом снижается пусковой ток до допустимой величины IЯ П / IЯ ном ≈ 2 – 2,5 , что позволяет двигателю развивать достаточный пусковой момент и в значительной степени устраняет недостатки прямого пуска. Реостатный способ пуска дпт В настоящее время наибольшее распространение получил реостатный способ пуска - обмотка возбуждения при выведенном регулировочном реостате RРР = 0 включена на номинальное напряжение, а для ограничения пускового тока в цепь якоря последовательно с обмоткой якоря двигателя включается специальный пусковой реостат RПР . Сопротивление пускового реостата выбирают таким, чтобы пусковой ток не превышал допустимого значения IЯП = (U - E)/ (RЯ + RПР) ≤ (2 – 2,5) IЯ ном . В момент подачи напряжения на двигатель при замыкании пускателя QF обмотка возбуждения включается в сеть, а ручка пускового реостата находится в исходном положении «0», в котором цепь якоря разомкнута. Для запуска двигателя ручка пускового реостата переводится в положение «1» и двигатель запускается при полностью включённом реостате, что обеспечивает заданное снижение пускового тока якоря. В процессе разгона двигателя пусковой реостат ступенями выводится (положения 1 → 2 → 3) и после окончания пуска реостат полностью выведен (положение 3, RПР = 0), а двигатель выходит на естественную (безреостатную) рабочую характеристику. Следует отметить, что реостат, включённый последовательно в цепь якоря и рассчитанный на длительную работу, может использоваться как в качестве пускового RПР, так и в качестве регулировочного R*. Реверсирование двигателей постоянного тока Изменение направления вращения якоря двигателя можно осуществить одним из двух способов: 1. Изменением полярности включения в сеть обмотки якоря; 2. Изменением полярности включения в сеть обмотки возбуждения. При реверсировании двигателя под напряжением применяется только первый способ - обмотка возбуждения остаётся включённой в питающую сеть, а переключатель QF из положения 1-1 переводится в положение 2-2, в результате чего обмотка якоря отключается от сети и снова включается в сеть с изменённой полярностью. Второй способ при реверсировании двигателя под напряжением не применяется, поскольку при отключении от сети обмотки возбуждения в ней наводится значительная ЭДС самоиндукции е = - d Ф /d t , опасная для целостности изоляции обмотки. Регулирование частоты вращения двигателей постоянного тока Из уравнения электрического равновесия двигателя постоянного тока с регулировочным реостатом в цепи якоря U = E + (R Я + R*) IЯ и формул ЭДС Е = сЕ Ф n и вращающего момента М = cM Ф IЯ можно получить формулу частоты вращения ДПТ с параллельным возбуждением: n = (U / сЕ Ф ) – (RЯ + R*) М / сЕ cM Ф 2 , - здесь U / сЕ Ф = nо - частота вращения идеального холостого хода при работе двигателя без потерь М = 0, Ф - магнитный поток машины (без учёта реакции якоря Ф = ФВ). Из полученной формулы следует, что частоту вращения ДПТ можно регулировать следующими способами: 1. Изменением магнитного потока возбуждения - полюсный способ. 2. Изменением подаваемого на якорь напряжения - якорный способ. 3. Изменением сопротивления реостата в цепи якоря - реостатный способ. Полюсный способ Полюсный способ регулирования частоты вращения двигателя осуществляется изменением магнитного потока возбуждения Ф = var с помощью изменения сопротивления регулировочного реостата в цепи возбуждения RРР = var . В номинальном режиме регулировочный реостат с целью снижения тепловых потерь полностью выведен (положение 1, RРР = 0). При регулировании реостат RРР частично (положение 2) или полностью (положение 3) вводится и его сопротивление возрастает RРР á. В результате возрастает сопротивление цепи возбуждения (RРР á + RОВ), что вызывает снижение тока возбуждения IB â и уменьшение магнитного потока двигателя Ф â. Снижение магнитного потока приводит в свою очередь к увеличению частоты вращения идеального холостого хода nоá и рабочей частоты вращения якоря n á > n ном: n = (U / сЕ Ф) – RЯ М / сЕ cM Ф 2 . Преимущества: 1. Простота; 2. Плавность регулирования частоты вращения двигателя; 3. Способ экономичен вследствие малых тепловых потерь в реостате (RРР IВ2 ); 4. Большой диапазон регулирования вверх от номинала D = n / n ном = 2 : 1 и даже 5 : 1 – для специальных конструкций двигателей. Недостатки – способ не позволяет регулировать частоту вращения вниз от номинала. ЯКОРНЫЙ СПОСОБ Якорный способ регулирования частоты вращения двигателя осуществляется изменением напряжения, подаваемого на якорь U = var, при независимом питании обмотки возбуждения. Для питания обмотки якоря двигателя обычно используется тиристорный регулируемый источник напряжения, с помощью которого можно плавно понижать напряжение на якоре Uâ < U ном , что приводит в свою очередь к снижению частоты вращения идеального холостого хода nоâ и рабочей частоты вращения якоря n â < n ном: n = (U / сЕ Ф) – RЯ М / сЕ cM Ф 2 . Преимущества: 1. Плавность регулирования частоты вращения двигателя; 2. Высокая экономичность; 3. Большой диапазон регулирования вниз от номинала D = n / n ном = 1 : 10; Недостатки – способ дорог. NB. Якорный способ регулирования в сочетании с полюсным регулированием реостатом в цепи возбуждения позволяет в широком диапазоне плавно регулировать частоту вращения двигателя как вниз, так и вверх от номинала. РЕОСТАТНЫЙ СПОСОБ Реостатный способ регулирования частоты вращения двигателя осуществляется изменением сопротивления регулировочного реостата в цепи якоря R* = var. В номинальном режиме регулировочный реостат в цепи якоря с целью снижения тепловых потерь полностью выведен (положение 1, R* = 0). При регулировании реостат частично (положение 2) или полностью (положение 3) вводится и его сопротивление возрастает R* á. В результате увеличивается сопротивление цепи якоря (R* á + RЯ), что при сохранении частоты вращения идеального холостого хода nо= const приводит к снижению частоты вращения якоря n â < n ном : n = (U / сЕ Ф ) – (RЯ + R*) М / сЕ cM Ф 2 Преимущества: 1. Простота; 2. Плавность регулирования частоты вращения двигателя; 3. Большой диапазон вниз от номинала D = n / n ном = 1 : 2 Недостатки: 1. Способ неэкономичен вследствие больших тепловых потерь в реостате (R* IЯ2 ); 2. Снижается жёсткость механической характеристики, что снижает стабильность работы двигателя |dn/dM| á. ЭЛЕКТРИЧЕСКОЕ ТОРМОЖЕНИЕ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА Работа электропривода большинства производственных механизмов состоит из трех этапов: пуск в ход, технологическая операция и останов. После отключения двигателя от сети его останов (торможение) происходит под действием сил трения, при этом кинетическая энергия движущихся частей выделяется в виде тепла в узлах трения механизма и двигателя. В тех случаях, когда запас кинетической энергии велик, а силы трения малы, время торможения может составить десятки секунд и даже несколько минут. Сокращение времени торможения, особенно когда длительность технологической операции мала, может значительно повысить производительность рабочего механизма, так как в режиме торможении обычно полезной работы не совершается. Для сокращения времени торможения в большинстве случаев применяют механические тормоза, которые имеют ряд существенных недостатков - быстрый износ трущихся поверхностей, трудность регулирования силы трения, громоздкость тормозного механизма и др. В настоящее время для торможения электропривода широко используются тормозные свойства самого приводного двигателя, что во многих случаях позволяет отказаться от механических тормозов. Механические тормоза необходимы как запасные или аварийные, если откажет электрическое торможение, а также для удержания механизма в неподвижном состоянии при неработающем двигателе. Во всех тормозных режимах двигатель развивает электромагнитный момент, действующий против направления вращения ротора и потому называемый тормозным моментом. Под действием тормозного момента в одних случаях происходит быстрый останов, в других - поддержание частоты вращения заданной величины. Для сокращения времени переходных процессов двигатель постоянного тока может использоваться в нескольких режимах электрического торможения. ТОРМОЖЕНИЕ ПРОТИВОВКЛЮЧЕНИЕМ Для торможения ДПТ способом противовключения используется схема реверсирования - обмотка возбуждения остаётся включённой в питающую сеть, а переключатель QF из положения 1-1 переводится в положение 2-2, в результате чего обмотка якоря отключается от сети и снова включается в сеть с изменённой полярностью. При этом изменяется направление тока якоря и направление электромагнитного момента, который теперь действует против вращающегося по инерции якоря, т.е. является тормозящим моментом. Преимущества - способ прост и эффективен, торможение практически мгновенное. Недостатки:1). Опасность реверсирования двигателя. 2). Очень большой тормозной ток, практически в 2 раза превышающий пусковой, что вызывает серьёзные нарушения в работе питающей сети и самого двигателя (см. Прямой пуск ДПТ). ДИНАМИЧЕСКОЕ ТОРМОЖЕНИЕ Для торможения ДПТ динамическим способом обмотка возбуждения остаётся включённой в питающую сеть, а переключатель QF из положения 1-1 переводится в положение 2-2, в результате чего обмотка якоря отключается от сети и замыкается накоротко или на тормозной резистор R т с целью снижения тока якоря. Отключённый от сети U = 0 и замкнутый на резистор двигатель переходит в генераторный режим и вырабатывает электрическую энергию за счёт кинетической энергии вращающегося привода E = сЕ ФВ n . При этом изменяется направление тока якоря IЯ = (U - E)/ RЯ и направление электромагнитного момента, который теперь действует против вращающегося по инерции якоря, т.е. является тормозящим моментом. Преимущества - способ прост и эффективен. Недостатки - большой тормозной ток при замыкании обмотки якоря накоротко (практически равный пусковому). ГЕНЕРАТОРНОЕ (РЕКУПЕРАТИВНОЕ) ТОРМОЖЕНИЕ Режим генераторного торможения возникает самопроизвольно при условии, когда частота вращения якоря n становится больше частоты вращения идеального холостого хода: n > nо. Такой режим возникает, например, при опускании груза, когда под действием его веса частота вращения якоря увеличивается и становится больше синхронной. При этом двигатель переходит в генераторный режим, а кинетическая энергия привода превращается в электрическую энергию и поступает в питающую сеть. Электромагнитный момент двигателя становится тормозящим, спуск груза притормаживается и тем самым ограничивается скорость опускания груза, хотя двигатель продолжает вращаться в том же направлении с повышенной частотой n > nо. 31. Электрический привод. Структура и преимущества электропривода. Трехфазные синхронные электродвигатели. Их преимущества и недостатки. Устройство и принцип работы. Основные характеристики. Режим синхронного компенсатора. Электрический привод (ЭП) – это электромеханическая система, предназначенная для преобразования ЭЭ в механическую, управление потоком этой энергии и содержащая: - преобразователь ЭЭ (ПЭЭ) - служит для изменения параметров ЭЭ (трансформаторы, выпрямители, частотные преобразователи); - электромеханический преобразователь (ЭМП) - преобразует электрическую энергию в механическую (электромагнитные и электромашинные преобразователи - различные типы двигателей); - преобразователь механической энергии (ПМЭ) - служит для изменения параметров механической энергии (редукторы, кулачковые механизмы, кулисные механизмы и др.); - система управления ЭП (СУЭП) - управляет режимом работы ЭП (включение, выключение, реверсирование, торможение, изменение частоты вращения ЭП); - рабочая машина (РМ) или исполнительный механизм (ИМ) - преобразует механическую энергию в требуемую работу. Структурная схема электропривода 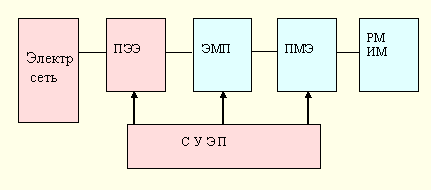 В настоящее время на получение механической энергии в электроприводе расходуется около 80 % электрической энергии, потребляемой в промышленности, или около 60 % всей вырабатываемой электрической энергии. Широкое распространение электропривода связано с такими его преимуществами, как 1. Простота подвода и распределения электрической энергии; 2. Высокая надежность, безопасность и экономичность электрических двигателей; 3. Простота и удобство обслуживания и эксплуатации электрических двигателей, управления, контроля и автоматизации работы электропривода; 4. Широкий выбор типов, конструктивных исполнений и мощностей электрических двигателей; 5. Широкий диапазон регулирования частоты вращения и хорошие регулировочные свойства электрических двигателей; 6. Высокая экологическая чистота производства при использовании электропривода. Другой весьма распространенный в промышленности тип машин переменного тока - синхронные двигатели – отличаются сложной конструкцией и высокой стоимостью, практически не регулируются, однако обладают высокими экономическими характеристиками и применяются в нерегулируемом электроприводе большой мощности (более 50 – 100 кВт) для привода мощных компрессоров, насосов, вентиляторов, дымососов. Основными частями синхронной машины являются якорь и индуктор (обмотка возбуждения). Якорь (обычно расположенный на статоре) представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора. Индуктор состоит из полюсов — электромагнитов постоянного тока[1] или постоянных магнитов. Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса. Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную конструкцию из электротехнической стали (то есть набранную из отдельных листов). Электротехническая сталь обладает рядом интересных свойств. В том числе она имеет повышенное содержание кремния, чтобы повысить её электрическое сопротивление и уменьшить тем самым вихревые токи Фуко. Принцип действия Двигательный режим Принцип действия синхронного двигателя основан на взаимодействии вращающегося переменного магнитного поля якоря и постоянных магнитных полей полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт), в маломощных — постоянные магниты. Есть также обращённая конструкция двигателей, где якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.) Запуск двигателя. Двигатель требует разгона до номинальной скорости вращения, прежде чем сможет работать самостоятельно. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это называется «вошёл в синхронизм». Для разгона обычно используется асинхронный режим, когда обмотки индуктора замыкаются через реостат или накоротко. После выхода на номинальную скорость индуктор запитывают постоянным током от выпрямителя. В двигателях с постоянными магнитами применяется внешний разгонный двигатель (обычно асинхронный). Существуют комбинированные варианты, в которых на роторе, вместе с постоянными или электромагнитами, установлены короткозамкнутые обмотки. Иногда на валу ставят небольшой генератор постоянного тока, который питает электромагниты. Также используется частотный пуск, когда частоту тока якоря постепенно увеличивают от очень малых до номинальных величин. Возможен и обратный вариант, когда частоту индуктора понижают от номинальной до 0, т.е. до постоянного тока. Частота вращения ротора [об/мин] остаётся неизменной, жёстко связанной с частотой сети [Гц] соотношением: Синхронные двигатели обладают ёмкостной нагрузкой, поэтому их выгодно использовать для компенсации индуктивной нагрузки (повышения коэффициента мощности). Синхронные двигатели применяют там, где нет необходимости частого пуска/остановки и регулирования скорости вращения (например в системах вентиляции). Генераторный режим Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки якоря, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120°, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей. Частота индуцируемой ЭДС [Гц] связана с частотой вращения ротора [об/мин] соотношением: Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям. |