Материалы для подготовки к экзамену по электротехнике. Закон Ома. Работа и мощность в электрической цепи. Закон ДжоуляЛенца
 Скачать 2.39 Mb. Скачать 2.39 Mb.
|

|
Достоинства АД: - простота конструкции; низкая стоимость; надежность и безопасность в работе; высокие эксплуатационные качества (практически не требуют обслуживания); жесткая механическая характеристика; достаточно высокая экономичность мощных АД. Недостатки АД: АД – основные потребители реактивной индуктивной мощности (65 - 70%), что приводит к снижению коэффициента мощности cos φ потребителя ЭЭ. В связи с этим оплата получаемой ЭЭ производится по повышенному тарифу или для снижения таких расходов требуется установка соответствующих компенсирующих устройств (возрастают капитальные затраты); большой пусковой ток – кратность  ; ;- низкие пусковые свойства (низкий пусковой момент) - сложность регулирования частоты вращения, поэтому АД обычно используют в нерегулируемом ЭП малой и средней мощности (P <= 50 - 100 кВт). Асинхронный двигатель состоит из двух частей, разделенных тонким воздушным зазором: 1. Статор – это неподвижная часть АД, он состоит из алюминиевого или чугунного корпуса, внутри которого расположен полый цилиндрический ферромагнитный сердечник. 2. Ротор – это вращающаяся часть АД, он представляет собой сплошной ферромагнитный цилиндр, укрепленный на валу машины. Сердечник статора набирается из отдельных листов электротехнической стали толщиной 0,35 - 0,5 мм, изолированных друг от друга слоем лака для уменьшения потерь от вихревых токов при перемагничивании. Он запрессовывается в станину. Станина выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов, из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка. Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, а концы – с4, с5, с6. Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже из алюминия. Начала и концы фаз выведены на клеммник , закреплённый на станине. Обмотка статора может быть соединена по схеме звезда или треугольник. Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Сердечник ротора набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Поэтому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором. Короткозамкнутая обмотка ротора состоит из стержней, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами. Такая обмотка напоминает “беличье колесо”, её называют “беличьей клеткой”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов. У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины. Основное назначение обмотки статора – создание в машине вращающего магнитного поля. Для получения вращающего магнитного поля должны соблюдаться следующие условия: наличие не менее двух обмоток, токи в обмотках должны отличаться по фазе и оси обмоток должны быть смещены в пространстве. Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов р=1. Оси обмоток фаз смещены в пространстве на угол 120°. К трём катушкам подключается три одинаковых напряжения, которые разнятся только фазами: UA=Umsin(ωt) . UB=Umsin(ωt+2π3) . UC=Umsin(ωt+4π3) 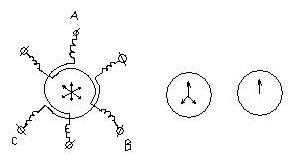 Вначале напряжение на А максимально, два других В и С не равны 0, но они гораздо меньше и имеют другое направление. Магнитное поле расположено вдоль оси катушки. Суммарное магнитное поле - укороченный вектор А вдоль оси А. На фазе А напряжение достигает амплитудного значения. Через треть периода магнитное поле максимально на фазе В, суммарное магнитное поле - укороченный вектор В вдоль оси В. Ещё через треть периода магнитное поле максимально на фазе С, суммарное магнитное поле – укороченный вектор С вдоль оси С. Далее всё повторяется. За один период магнитное поле, оставаясь неизменным, повернулось на один полный оборот. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Частота вращения магнитного поля n1 зависит от частоты питающей сети f и числа пар полюсов обмотки статора р: n1=60 fp Вначале напряжение на А максимально, два других В и С не равны 0, но они гораздо меньше и имеют другое направление. Магнитное поле расположено вдоль оси катушки. Суммарное магнитное поле - укороченный вектор А вдоль оси А. На фазе А напряжение достигает амплитудного значения. Через треть периода магнитное поле максимально на фазе В, суммарное магнитное поле - укороченный вектор В вдоль оси В. Ещё через треть периода магнитное поле максимально на фазе С, суммарное магнитное поле – укороченный вектор С вдоль оси С. Далее всё повторяется. За один период магнитное поле, оставаясь неизменным, повернулось на один полный оборот. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Частота вращения магнитного поля n1 зависит от частоты питающей сети f и числа пар полюсов обмотки статора р: n1=60 fpОбмотка статора создаёт магнитное поле, вращающееся с частотой n1. Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки: силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т.е. ротора, относительно магнитного поля. В обмотке ротора появится ток, направление которого будет совпадать с направлением ЭДС. В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки: силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора. Электромагнитная сила создаст вращающий момент, под действием которого ротор начнёт вращаться с частотой n2. Направление вращения ротора совпадает с направлением вращения магнитного поля. Частота вращения ротора двигателя n2 всегда меньше частоты вращения вращающегося магнитного поля n1 . Причина асинхронного вращения ротора заключается в том, что если ротор вращается синхронно с частотой поля n2 = n1, то его обмотка не пересекается магнитным полем и в ней не наводится ЭДС и отсутствует ток. При синхронном вращении ток в роторе отсутствует и электромагнитный момент двигателя равен нулю. К валу двигателя всегда приложен некоторый тормозной момент трения или нагрузки, под действием которого двигатель замедляет свой ход до тех пор, пока в роторе не появится ток, необходимый для обеспечения соответствующего вращающего момента, после чего двигатель продолжит вращаться с установившейся частотой вращения меньше синхронной n2 < n1 . 28. Основные характеристики трехфазных асинхронных электродвигателей. Способы пуска и регулирования частоты вращения. Реверсирование и способы электрического торможения асинхронных электродвигателей. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ АД 1. МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА Механической характеристикой называют зависимость частоты вращения ротора от величины нагрузки на валу двигателя: n2 (M нагр). М нагр – тормозной момент нагрузки на валу АД. При увеличении нагрузки на вал электродвигателя от холостого хода до номинальной частота вращения n2 несколько снижается (на 3..7%). - механическая характеристика имеет слабо падающий вид при увеличении нагрузки. Другими словами, частота вращения АД слабо зависит от нагрузки, поэтому такая характеристика называется жесткой. М пуск – пусковой момент АД (точка пуска). М н1 и М н2 - тормозной момент нагрузки (Н1 и Н2), приложенный к валу АД при пуске. Если пусковой момент АД превышает момент нагрузки М пуск > М н1 , то при включении АД в сеть происходит запуск и разгон электрического привода. Если пусковой момент АД меньше, чем момент нагрузки М пуск < М н2 , то при включении АД в сеть запуска двигателя не происходит, т.е. ротор АД остаётся неподвижным. При этом АД находится в режиме короткого замыкания, что может привести к быстрому перегреву и выходу двигателя из строя. Точка максимального момента разделяет зависимость М(n) или M(s) на устойчивую и неустойчивую части и определяет перегрузочную способность АД – λ max = М max / М ном. Если тормозной момент нагрузки М Н, приложенный к валу АД, по какой либо причине становится больше максимального, то происходит останов работающего АД (так наз. «опрокидывание двигателя») и возникновение режима короткого замыкания АД. 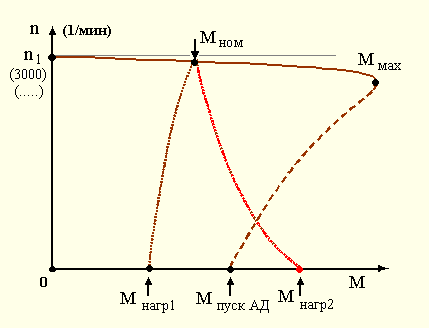 2. ЭНЕРГЕТИЧЕСКИЕ (ЭКОНОМИЧЕСКИЕ) ХАРАКТЕРИСТИКИ: зависимости КПД и коэффициента мощности (КМ cos φ) от мощности нагрузки на валу ЭД η (P2); cos φ (P2) 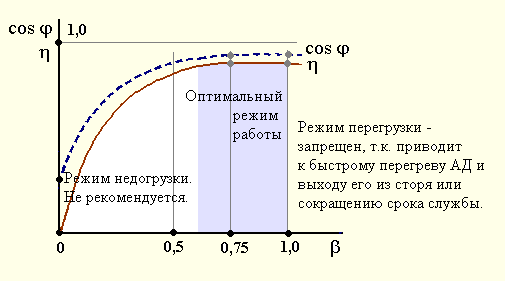 Способы пуска асинхронного двигателя В момент пуска любого электрического двигателя (АД, ДПТ, СД), когда ротор неподвижен n2 = 0, а обмотка статора включена в сеть, двигатель находится в самом тяжелом (аварийном) режиме - в режиме короткого замыкания. Поэтому рекомендуется избегать частых пусков электрического двигателя , а сам процесс пуска и разгона двигателя до номинального режима не должен быть длительным. В зависимости от мощности АД используют два способа пуска: 1) Прямой пуск Используется для АД малой мощности: обмотка статора АД с помощью простейшей аппаратуры (контактор, пускатель) включается в питающую сеть на номинальное напряжение. Достоинства: - способ очень прост, дешев, экономичен, не требует специальной аппаратуры. Недостатки: - сравнительно небольшой пусковой момент - кратность пускового момента: М пуск / М ном ≈ 1,4 - 1,8; - очень большой пусковой ток – кратность пускового тока I пуск / I ном ≈ 4 - 6. В результате большого пускового тока происходят: - дестабилизация питающего напряжения (в момент пуска напряжения сети кратковременно снижается); - большие электрические и тепловые перегрузки питающей сети, пусковой аппаратуры и самого двигателя; - возникают сильные динамические (ударные) нагрузки на вал двигателя и передаточные устройства. 2) Пуск АД при пониженном напряжении Используется для пуска АД средней и большой мощности с целью снижения пускового тока и устранения связанных с этим недостатков прямого пуска. При пуске на статор подается пониженное по сравнению с Uном напряжение. В качестве специальных устройств для снижения напряжения на статоре часто используются достаточно дешёвые индуктивные катушки - реакторы, включаемые последовательно с обмоткой статора. Схема реакторного пуска 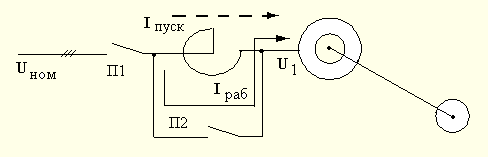 При этом напряжение на статоре U1 = Uном – ΔU, где - ΔU – падение напряжения на реакторе. При пуске и разгоне напряжение на статоре снижается за счет падения напряжения на реакторе ΔU, а после окончания разгона реактор шунтируется пускателем П2, и на статор подаётся номинальное напряжение. Иногда для снижения напряжения на статоре применяют более дорогие устройства – автотрансформаторы. Достоинства: - снижается пусковой ток. Недостатки: - более сложная схема пуска; при пониженном напряжении на статоре резко снижается пусковой момент (вращающий момент АД 4. Реверсирование ад (изменение направления вращения) Реверсирование АД производится изменением порядка чередования фаз на статоре за счет одновременного переключения любых двух фаз. Схема реверсирования АД 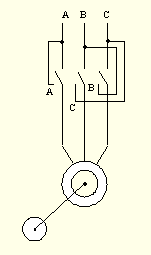 Способы регулирования частоты вращения ад Способы регулирования частоты вращения адАД отличается плохими регулировочными свойствами, поэтому обычно используется в нерегулируемом электроприводе. Однако в настоящее время в связи с широким распространением тиристорных (транзисторных) преобразователей частоты (ТПЧ) всё более широкое распространение получает т.н. частотно-регулируемый электропривод, в котором используется частотное регулирование частоты вращения асинхронного электродвигателя. Частотное регулирование ад Частотное регулирование АД производится путем изменения частоты питающего напряжения (f1 – var), подаваемого на обмотки статора от частотного преобразователя. 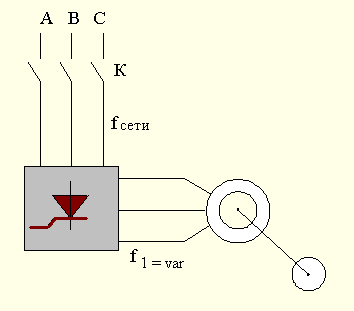 Угловая синхронная частота вращения АД:  При изменении частоты f1 = var пропорционально изменяется частота вращающегося магнитного поля (синхронная частота Для сохранения перегрузочной способности (максимального момента АД) частотное регулирование ведут при условии U1/f1 = const. 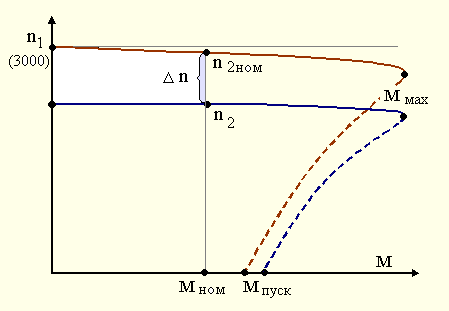 Регулирование обычно ведётся в сторону понижения частоты от f1 ≤ 50 Гц, при этом частота АД также понижается «вниз от номинала» n 2 ≤ n 2ном .. Регулирование плавное, экономичное, диапазон регулирования Δn достаточно большой - примерно n 2 / n 2ном ≈ 1:10 , но способ очень дорогой. Однако, несмотря на высокую стоимость ТПЧ (100-200 $ на 1 кВт), срок окупаемости частотно-регулируемого электропривода обычно составляет 2-3 года. Применение частотно-регулируемого ЭП позволяет экономить за счет оптимизации режима работы технологического оборудования до 30-60% потребляемой ЭЭ и снизить эксплуатационные расходы на 30-50%. Кроме того, при использовании частотно-регулируемого ЭП улучшаются условия пуска АД, повышается плавность разгона (снижаются тепловые, электрические, и ударные механические нагрузки), что увеличивает срок службы электропривода с 10-15 до 20-25 лет. В настоящее время частотно-регулируемый ЭП находит широкое применение в качестве привода насосов и вентиляторов системах тепло-водоснабжения, в качестве привода современных лифтов и др. Полюсное регулирование Осуществляется за счет изменения числа пар полюсов статора p1 = var. В простейшем случае на статоре АД уложено несколько обмоток с различным числом пар полюсов, одна из которых включается в питающую сеть. В более сложных конструкциях статора АД изменение числа пар полюсов p1 = var производится путём переключения секций обмотки с последовательного соединения на параллельное или наоборот. При изменении числа пар полюсов р1 = var обратно пропорционально изменяется частота вращающегося магнитного поля (синхронная частота Недостатки полюсного способа регулирования: регулирование ступенчатое, а также сложное и дорогое устройство статора. 6. Способы электрического торможения ад Для сокращения времени переходного процесса останова АД наряду с механическим торможением часто применяют один из трёх способов электрического торможения. 1) Торможение противовключением В этом способе обмотка статора АД отключается от трёхфазной питающей сети и снова включается в сеть с изменением порядка чередования фаз (см. реверсирование АД). Достоинства: - способ прост и эффективен, торможение практически мгновенное. Недостатки: - очень большой тормозной ток, значительно больший, чем пусковой (см. прямой пуск АД); - опасность реверсирования ЭД. 2) Динамическое торможение Обмотка статора отключается от трёхфазной питающей сети, после чего любые две фазы питающие статор включаются в сеть постоянного тока. Достоинства: - способ прост и достаточно эффективен. Недостаток – требуется источник постоянного тока. 3) Генераторный (рекуперативный) способ с возвратом ЭЭ в питающую сеть Режим генераторного торможения возникает самопроизвольно при условии, когда частота вращения ротора n2 становится больше синхронной частоты АД n1 : n2 > n1. Такой режим возникает, например, при опускании груза, когда под действием его веса частота вращения ротора АД увеличивается и становится больше синхронной. При этом двигатель переходит в генераторный режим, а кинетическая энергия привода превращается в ЭЭ и поступает в питающую сеть. Электромагнитный момент двигателя становится тормозящим, а спуск груза несколько притормаживается, но двигатель продолжает вращаться с частотой n2 > n1 |