Электромеханические и регулировочные свойства электроприводов постоянного тока
 Скачать 49.59 Kb. Скачать 49.59 Kb.
|

|
Глава 2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ И РЕГУЛИРОВОЧНЫЕ СВОЙСТВА ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА Механические характеристики электродвигателей и рабочих механизмов Механической характеристикой электродвигателя называется зависимость установившейся скорости двигателя от создаваемого им момента, т.е. ω = f (M). Иногда под механической характери- стикой понимают зависимость частоты его вращения от момента на валу, т.е. n = f (M). У большинства электродвигателей с увеличением нагрузки на валу частота вращения снижается. Характер изменения частоты вращения двигателя при изменении момента на его валу определяет жесткость механической характеристики. Критерием для оценки жесткости характеристик служит их крутизна dn . dM (2.1) Если изменение момента и соответствующее изменение частоты вращения двигателя выразить в процентах, то % n% M% 100 % (2.2) Механические характеристики электродвигателей по степени жесткости могут быть разделены на три группы (рис. 2.1): абсо- лютно жесткие, жесткие и мягкие. Абсолютножесткиемеханическиехарактеристики(прямая 1), имеющие крутизну β = 0. Такими характеристиками обладают синхронные двигатели при нагрузках, не превышающих перегру- зочной способности. Жесткиемеханическиехарактеристики(прямая 2) со срав- нительно небольшим снижением частоты вращения двигателя при  Рис. 2.1. Механические характеристики электродвигателей возрастании момента. Крутизна таких характеристик β ≤ 10 %. Та- кими характеристиками обладают двигатели постоянного тока неза- висимого и параллельного возбу- ждения, асинхронные двигатели в области рабочих скольжений. Мягкиемеханическиехарак- теристикидвигателей с большим относительным снижением ча- стоты вращения при увеличении момента (кривая 3). Крутизна ее β > 10 %. Такими характеристиками обладают двигатели посто- янного тока последовательного возбуждения или смешанного возбуждения с сильной последовательной обмоткой возбуждения. Иногда вместо механических характеристик свойства электрод- вигателя целесообразно отражать электромеханическими характе- ристиками, представляющими собой зависимость установившейся скорости двигателя от потребляемого им тока, т.е. ω = f (I). Подобно механическим электромеханические характеристики можно пред- ставить в виде зависимости частоты вращения электродвигателя от тока, протекающего по цепи его якоря или ротора, т.е. n = f (I). Как механические, так и электромеханические характеристики могут быть естественными и искусственными. Естественной характеристикой называется характеристика, соответствующая работе ЭД при номинальных параметрах питаю- щей сети, нормальной схеме подключения к ней и при отсутствии добавочных сопротивлений в цепях электродвигателя. Каждому электродвигателю присуща только одна естественная характери- стика. Искусственные характеристики получаются: а) при питании ЭД от сети с напряжением или частотой, отличающимися от но- минальных значений; б) при включении хотя бы в одну из цепей ЭД добавочных сопротивлений; в) при включении ЭД к источнику тока по специальной схеме. Очевидно, что степень жесткости искусственных характеристик всех типов электродвигателей (кроме синхронного) можно изме- нять в достаточно широких пределах. Работа любого электропривода возможна лишь при согласован- ности механических характеристик электродвигателя и рабочего механизма. Механическойхарактеристикойрабочегомеханизмапо анало- гии с электродвигателями называется функциональная зависимость между создаваемым механизмом статическим моментом, приве- денным к валу электродвигателя, и частотой вращения последнего, т.е. n = f (Mс). Механические характеристики наиболее распростра- ненных на судах рабочих механизмов можно классифицировать, исходя из следующей эмпирической формулы: Мс = М0 + (Мс.ном – М0) (n/nном)х, (2.3) где Мс – статический момент рабочего механизма; М0 – момент сил трения в движущихся частях механизма; Мс.ном – статический момент рабочего механизма при номиналь- ной частоте вращения; х – коэффициент, характеризующий изменение статического момента при изменении частоты вращения механизма. При х= 0 статический момент Мс не зависит от частоты враще- ния (прямая 1 на рис. 2.2). Такой характеристикой обладают краны, лебедки и другие погрузочные устройства.  При х= 1 статический момент Мс имеет линейно-возрастающую зависимость от частоты вращения (прямая 2 на рис. 2.2). Такой ха- При х= 1 статический момент Мс имеет линейно-возрастающую зависимость от частоты вращения (прямая 2 на рис. 2.2). Такой ха-рактеристикой обладает, например, преобразовательный агрегат, у ко- торого генератор постоянного тока независимого возбуждения работа- ет на внешнюю цепь с постоянным сопротивлением (для упрощения принято М0 = 0). Рис. 2.2. Механические характеристики производственных механизмов При х= 2 статический момент Мс имеет параболическую зави- симость от частоты вращения (кривая 3 на рис. 2.2). При всех значениях хдля упрощения принято, что М0 = 0. В общем случае показатель степени хможет принимать и другие значения. Построение механических характеристик рабочих механизмов в координатах n и Мс (см. рис. 2.2) выполняется в предположении, что моменты, действующие согласно с направлением движения механизма, положительны, а направленные навстречу ему – от- рицательны. В процессе работы вращающий момент, развиваемый электро- двигателем, может быть для привода движущим или тормозным. Для электропривода также свойственны два направления вращения. Исходя из этого при изображении механических характеристик электродвигателя в прямоугольной системе координат одно из направлений вращающего момента электродвигателя и его угловой скорости (частоты вращения) принимают условно положительным и откладывают положительное значение скорости вверх, а положи- тельное значение момента – вправо от начала координат (рис. 2.3).  Рис. 2.3. Расположение механических характеристик в системе координат Так как мощность электродвигателя пропорциональна произ- ведению момента и скорости, то, следовательно, при совпадении знаков сомножителей мощность положительна и направлена от электродвигателя к механизму. Подобный режим, когда мощность передается от электродвигателя механизму, называется двигатель- ным. Этому режиму работы соответствуют механические харак- теристики электродвигателя, расположенные в I и III квадрантах. Если направление момента электродвигателя меняется, напри- мер, вследствие изменения направления тока в его обмотках, а направление скорости остается прежним, то мощность электро- двигателя становится отрицательной, направленной от механизма к электродвигателю. Такой режим работы называется тормозным и ему соответствуют механические характеристики электродвига- теля, расположенные во II и IV квадрантах. Совместная работа электродвигателя с рабочим механизмом может осуществляться лишь при определенной согласованности их механических характеристик. Графический анализ согласо- ванности свойств электродвигателя и рабочего механизма можно осуществить путем наложения в одних координатных осях n и М как механической характеристики ЭД, так и механической характеристики механизма, построенных в одном масштабе. При этом необходимо: во-первых, статический момент механизма привести к валу электродвигателя, и во-вторых, учитывать, что при переводе механических характеристик механизма из осей n и Мс в оси координат электродвигателя n и М знаки статических моментов механизма изменятся на противоположные. Если при этом в любом квадранте координатных осей окажется точка пе- ресечения механических характеристик электродвигателя и рабо- чего механизма, следовательно, в этой точке электромагнитный момент двигателя М будет равен и противоположно направлен приведенному к валу электродвигателя статическому моменту механизма Мс, т.е. М = Мс, что соответствует установившему- ся режиму работы электропривода. Таким образом, например, точка А на рис. 2.4 является точкой установившегося режима работы электропривода, приводящего в действие механизм с 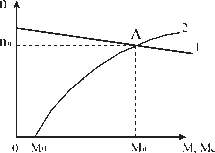 Рис. 2.4. Совмещенные механические характеристики электродвигателя и механизма механической характеристикой, соответствующей кривой 2, и снабженного электродвигателем с механической характеристи- кой, соответствующей прямой 1. Следовательно, наличие то- чек пересечения между меха- ническими характеристиками электродвигателя и рабочего механизма, построенными в одних координатных осях, явля- ется основным условием возможности их совместной работы в установившихся режимах. Однако это условие является недостаточным, поскольку должен быть решен также вопрос о статической устойчивости работы электропривода. Подстатическойустойчивостьюпонимается такое состояние установившегося режима работы привода, когда при случайно возникшем отклонении скорости от установившегося значения привод возвращается к режиму установившейся работы. При отсутствии устойчивости состояние установившегося режима работы привода таково, что любое, даже самое малое, отклонение скорости от установившегося значения приводит к изменению состояния привода – он не возвращается к первоначальному установившемуся режиму. Привод статически устойчив, если при положительном при- ращении частоты вращения момент двигателя окажется меньше статического момента и привод вследствие этого затормозится до прежнего значения скорости. При отрицательном приращении частоты вращения момент двигателя окажется больше статическо- го момента и привод разгонится до прежнего значения скорости. Таким образом, устойчивая работа электропривода обеспечи- вается при условии, когда dM/dn < dMс/dn. (2.4) Проанализируем, например, устойчивость работы асинхрон- ного короткозамкнутого двигателя при нагрузке его постоянным статическим моментом (рис. 2.5). Такой режим соответствует, на- пример, электроприводу лебедки при подъеме груза. Возможные установившиеся режимы работы электропривода определяются точками аи бпересечения механических характеристик асинхрон- ного двигателя 1 и рабочего механизма 2.  1 – механическая характеристика асинхронного двигателя; 2 – механическая характеристика рабочего механизма 1 – механическая характеристика асинхронного двигателя; 2 – механическая характеристика рабочего механизмаРис. 2.5. Механическая характеристика асинхронного короткозамкнутого двигателя при нагрузке его постоянным статическим моментом Предположим, что работа электропривода соответствует точке ас частотой вращения электродвигателя n. Если частота вращения электродвигателя изменится, например, уменьшится до значения n1, то электромагнитный момент двигателя возрастет до величины М1 и окажется больше статического момента сопро- тивления Мс на его валу. Под действием избыточного момента, равного разности М1 – Мс, частота вращения двигателя возрастет до прежнего значения n. В случае увеличения частоты вращения двигателя до значения n2 окажется, что М2 < Мс. Это приведет к снижению частоты вращения двигателя до первоначального значения n. Следовательно, точка а является точкой устойчивой работы электропривода. Предположим теперь, что работа электропривода характери- зуется точкой бна рис. 2.5. Установившийся режим двигателя осуществляется при частоте вращения n’ и равенстве электромаг- нитного вращающего момента М и статического момента сопро- тивления Мс на его валу. Снижение частоты вращения приведет к уменьшению вращающего момента двигателя до значения М1' < Мс, что вызовет дальнейшее снижение частоты вращения двигателя, вплоть до его остановки. Нетрудно видеть, что при увеличении частоты вращения двигателя вращающий момент возрастет и превысит по значению статический момент сопротивления (М2' > Мс), в результате чего будет происходить дальнейший рост частоты вращения до значения, соответствующего точке а, т.е. точке устойчивой работы двигателя. Следовательно, в точке бработа электропривода оказывается неустойчивой. В общем случае неустойчивая работа электропривода имеет место, когда dM/dn > dMс/dn. (2.5) Обычно при проектировании электропривода механическая характеристика рабочего механизма уже задана. Следовательно, для обеспечения устойчивой работы в установившихся режимах электропривода при определенных скоростях и статических мо- ментах рабочего механизма необходимо подбирать механическую характеристику электродвигателя соответствующей формы. Это достигается выбором типа электродвигателя и изменением элек- трических параметров его цепей. Иногда для получения требуемых механических характеристик электродвигателей целесообразно использовать специальные схемы их включения. |