Конспект лекций по РЛС и САРП для СВФ. Конспект лекций по рлс и сарп для свф
 Скачать 0.66 Mb. Скачать 0.66 Mb.
|

|
Конспект лекций по РЛС и САРП для СВФ Введение Цель и задачи курса: дать все необходимые теоретические материалы для грамотного, осознанного, прикладного использования средств радиолокации и радионавигации, привить навыки по работе с различными типами аппаратуры, особенностями ее использования. Слушатель должен знать и уметь грамотно использовать аппаратуру, быть готовым к появлению новой интегрированной аппаратуру. История возникновения радиолокационных систем В 1897, проводя опыты по радиосвязи между стоявшим на якоре транспортом "Европа", на верхнем мостике которого находился передатчик, и крейсером "Африка", на котором помещался приемник, изобретатель радио Александр Попов обнаружил новое физическое явление. О чем и сделал запись в отчете комиссии, назначенной для проведения этих опытов: "Влияние судовой обстановки сказывается в следующем: все металлические предметы (мачты, трубы, снасти) должны мешать действию приборов как на станции отправления, так и на станции получения, потому что, попадая на пути электромагнитной волны, они нарушают ее правильность, отчасти подобно тому, как действует на обыкновенную волну, распространяющуюся по поверхности воды, брекватер, отчасти вследствие интерференции волн, в них возбужденных, с волнами источника, т.е. влияют неблагоприятно. ... Наблюдалось также влияние промежуточного судна. Так, во время опытов между "Европой" и "Африкой" попадал крейсер "Лейтенант Ильин", и если это случалось при больших расстояниях, то взаимодействие приборов прекращалось, пока суда не сходили с одной прямой линии". Это первое в истории документальное подтверждение открытия основного принципа радиолокации - отражения радиоволн от металлических предметов. Спустя 7 лет, в 1904 г немецкий изобретатель Хюльсайер запатентовал способ обнаружения металлических объектов по отражению ими радиоволн. Первая лампа-диод была построена в том же 1904 г, а первый триод в 1907. Вспомнили об эффекте американцы. В 1922 г Тейлор и Юнг исследовали отражение радиоволн от кораблей и дали начало практическому использованию эффекта. С этого времени радиолокация становится военной и начинает развиваться параллельно в США и Англии. В конце 20-х сходные исследования проводятся в Германии. В нашей стране идеи радиолокации продвигал с 1932 г научный сотрудник Ленинградского электрофизического института (ЛЭФИ) П.К. Ощепков, позднее предложивший использовать импульсное излучение. Идея овладела военными и 16 января 1934 года в Ленинградском физико-техническом институте (ЛФТИ) под председательством академика А. Ф. Иоффе состоялось совещание, на котором представители ПВО РККА поставили задачу обнаружения самолетов на высотах до 10 и дальности до 50 км в любое время суток и в любых погодных условиях. Первые практические исследования по обнаружению гидросамолетов проводились в Ленинграде в декабре 1933 г. 3 января 1934 г. во время очередных испытаний удалось впервые обнаружить гидросамолет на расстоянии 600 — 700 м при высоте 100—150 м. Используемая аппаратура включала радиопередатчик непрерывных колебаний на волне 50—60 см, мощностью 0,2 Вт, приемник суперрегенеративного типа, передающую и приемную антенны в виде параболических зеркал диаметром 2 м. Излучающая аппаратура размещалась на берегу, а приемная — на льду в 20 м от берега. Принимаемые отраженные сигналы позволяли наблюдать эффект Доплера в виде характерной пульсации интенсивности звуковых сигналов в наушниках при вхождении гидросамолета в зону радиовидимости. Несмотря на небольшое расстояние, полученное при радиообнаружении гидросамолета, проведенный опыт можно практически считать началом рождения отечественной радиолокации. Наряду с ЦРЛ работы по радиолокации были начаты в 1934 г. и в ЛЭФИ под руководством академика А. А. Чернышева. Здесь в 1935 г. был разработан и испытан подвижной двухантенный зенитный радиоискатель «Буря», состоящий из магнетронного генератора на волне 25 см, мощностью непрерывных колебаний 6—7 Вт; передающей и приемной антенн параболического типа диаметром по 2 м с шириной диаграммы направленности 7—10°; регенеративного приемника и детектора с прямым усилением; источника питания, состоящего из аккумуляторов и сухих батарей. При испытаниях радиоискатель (так вначале называли РЛС) показал следующие результаты: дальность обнаружения цели (самолета) 10—11 км; погрешность определения азимута около 3°; определения угла места около 4°. Для радиообнаружения кораблей была изготовлена экспериментальная установка «Стрела»— копия радиоискателя «Буря» с параболическими антеннами меньшего диаметра (1,5 м вместо 2 м). Поскольку скорость кораблей по сравнению со скоростью самолетов меньше, приемник этой установки имел расширенную полосу пропускания частот в сторону более низких частот. Практически эта установка была испытана на о-ве Кроншлот, вблизи Кронштадта, в августе 1936 г. Испы  тания показали, что небольшие самолеты обнаруживались на расстоянии 10—12 км, а корабли — на расстоянии 3—5 км. тания показали, что небольшие самолеты обнаруживались на расстоянии 10—12 км, а корабли — на расстоянии 3—5 км.Во время этих испытаний впервые было обнаружено влияние волнения моря на прием отраженных сигналов. При волнении на море в приемнике радиоискателя возникали сильные помехи, затрудняющие наблюдение. Кратковременные помехи возникали и при пролете вблизи радиоискателя стай птиц, попадающих в сферу облучения и создающих отражение энергии, которая принималась антенной одновременно с сигналами, отраженными от кораблей и самолетов. В 1936—1937 гг. в ЛФТИ, где также с 1934 г. были развернуты работы по радиообнаружению, была создана первая экспериментальная импульсная установка на волне 3,7 м. Испытания этой установки показали достоинства импульсного метода: большая дальность действия за счет повышения мощности в импульсе; возможность визуального наблюдения сигналов с помощью ЭЛТ и др. В 1938 г. в ЛФТИ на базе этой установки была разработана и испытана импульсная РЛС мощностью 50 кВт в импульсе при анодном напряжении 15—22 кВ. Передающая антенна состояла из открытого двухпроводного фидера и излучателя типа «волновой канал», имеющего 5 детекторов и 3 рефлектора. Приемная антенна того же типа располагалась на расстоянии 1000 м от передающей. Синхронизация работы РЛС осуществлялась от питающего напряжения 50 Гц. В августе 1938 г. во время испытаний эта станция обеспечила обнаружение самолета на высоте 1500 м, на расстоянии до 50 км. Менее чем через год с помощью ЛФТИ была разработана импульсная РЛС, работающая на волне 4 м, с дальностью действия до 75—95 км, получившая название «Редут», которая получила первое боевое крещение во время войны с белофинами зимой 1939/40 г. на Карельском перешейке. В октябре-ноябре 1939 г. РЛС «Редут» была испытана в морских условиях в районе Севастополя. Чтобы выяснить наиболее выгодные условия обнаружения кораблей, РЛС устанавливали на различной высоте над уровнем моря и в различном удалении от кромки берега. При расположении станции на берегу непосредственно у кромки воды и при высоте установки антенны 10 м над уровнем моря надводные корабли не обнаруживались. Самолет, летевший на высоте 6000 м, обнаруживался на расстоянии до 110 км. При расположении РЛС у обрыва на высоте 160 м над уровнем моря надводные корабли обнаруживались на расстоянии до 20—25 км. Таким образом, в процессе этих испытаний впервые практически было выяснено влияние длины волны РЛС (станция работала в метровом диапазоне волн) и высоты установки антенны на дальность обнаружения надводных объектов (кораблей). В сентябре 1938 г. в Ленинграде была проведена первая научно-техническая конференция по радиообнаружению, в которой приняли участие крупные советские ученые М. В. Шулейкин, М. А. Бонч-Бруевич, Б. А. Введенский, создатели первых станций радиообнаружения Ю. К. Коровин, Ю. Б. Кобзарев, представитель ВМФ И. В. Бренев и представители ряда других организаций. Среди докладов и сообщений, посвященных развитию техники радиообнаружения, большое внимание на конференции было уделено серьезным успехам ЛФТИ в области разработки импульсных РЛС под руководством Ю. Б. Кобзарева. Поэтому конференция рекомендовала расширить исследования по импульсному радиообнаружению также и в других организациях. Дальнейшее совершенствование импульсных РЛС заключалось в совмещении радиоизлучения и радиоприема в одной антенне, т. е. в создании одноантенной РЛС и в создании вращающейся антенны. Наряду с проведением исследований, обеспечивающих создание одноантенных РЛС, были приняты меры к увеличению дальности радиолокационного обнаружения. За основу разработки станции дальнего обнаружения была принята РЛС «Редут». 26 июля 1940 г. эта станция была принята на вооружение противовоздушной обороны под названием РУС-2 (радиоулавливатель самолетов) . РЛС РУС-2 позволяла не только обнаруживать самолеты на больших расстояниях и практически на всех высотах, но и непрерывно определять их дальность, азимут и скорость полета. Кроме того, при круговом синхронном вращении передающей и приемной антенн эта РЛС обнаруживала группы и одиночные самолеты, находившиеся в воздухе на разных азимутах и дальностях и следила с перерывами во времени (с дискретностью один оборот антенны) за их перемещением. За научно-технический вклад в создание первых станций дальнего обнаружения самолетов группе сотрудников ЛФТИ Ю. Б. Кобзареву, П. А. Погорелко, Н. Я. Чернецову в 1941 г. была присуждена Государственная премия. Они стали первыми лауреатами Государственной премии в области радиолокации. В апреле 1940 г. была начата разработка первой корабельной РЛС. Станция должна была быть одноантенной, импульсной, приспособленной для работы в условиях качки, повышенной влажности и отвечать другим требованиям корабельных условий. По первоначальному варианту предусматривалась разработка корабельного варианта РЛС РУС-2. В процессе разработки РЛС, получившей название «Редут-К» (корабельный), была использована схема одноантенной РЛС типа «Редут-41», известной также под названием «Пегматит» или РУС-2С. Перед началом Великой Отечественной войны РЛС «Редут-К» была установлена на одном из крейсеров на Черном море и надежно обнаруживала самолеты и корабли. Когда в августе 1942 г. крейсер получил повреждение, станция несла до конца 1943 г. боевую службу как береговой пост наблюдения в районе Поти. РЛС «Редут-К» получила отличную оценку командования Черноморского флота. В 1943 г. была начата разработка новой корабельной РЛС обнаружения воздушных и надводных целей «Гюйс» на волне 1,5 м (в отличие от «Редут-К»— на волне 4 м). В марте 1944 г. образец станции «Гюйс» был установлен на эсминце «Громкий» Северного флота и проходил испытания в боевой обстановке на Баренцевом море. Эта станция послужила прототипом для создания серии последующих корабельных РЛС военного периода, известных под названиями «Гюйс-1», «Гюйс-1М», «Гюйс-1М4» и др. Корабельные РЛС имели большое значение в практике военных операций на море. Они широко использовались также при конвоировании транспортных судов. Осуществляли поиск подводных лодок, обеспечивали воздушное наблюдение, удержание места в строю кораблями охранения, вели поиск отставших транспортов и помогали решению навигационных задач. После окончания Великой Отечественной войны некоторые типы корабельных РЛС были испытаны в качестве навигационных на судах транспортного флота. Одна из таких РЛС типа «Гюйс-М» была установлена на теплоходе «Грибоедов» БМП. Более успешной оказалась попытка применения для указанных целей РЛС типа «Зарница», которая некоторое время получила распространение, особенно на судах ДВМП. РЛС «Зарница» представляла собой катерную станцию обнаружения надводных объектов и самолетов. Учитывая значение радиолокации в морском судовождении, в 1949 г. Советом Министров СССР было издано постановление о создании первой отечественной судовой навигационной РЛС. Разработка РЛС была осуществлена группой радиоспециалистов во главе с главным конструктором Е. Л. Златкиным. Уже в мае — августе 1950 г. сконструированная РЛС, получившая название «Нептун», успешно прошла заводские и Государственные испытания в Балтийском море и Финском заливе и была принята для установки на всех морских судах, включая промысловые и ледокольные. РЛС «Нептун» и сконструированная несколько позднее для малотоннажных судов РЛС «Створ» сыграли большую роль в повышении безопасности мореплавания и практическом использовании радиолокационной техники в судовождении. Судовая навигационная РЛС «Нептун» предназначалась для установки на судах водоизмещением не менее 600 т. РЛС «Нептун» отличалась продуманностью конструкции, достаточно высокой надежностью работы и ремонтопригодностью. Поэтому, несмотря на некоторое несовершенство эксплуатационных характеристик (сравнительно большая минимальная дальность, невысокая разрешающая способность и др.), она пользовалась популярностью и доверием со стороны судоводителей. После снятия РЛС «Нептун» с производства многие капитаны еще долгое время старались сохранить эту РЛС на судне. В 1955 г. по заказу МРХ была начата разработка судовой навигационной РЛС для промысловых судов среднего и малого тоннажа, получившей название «Створ». В коллектив радиоспециалистов промышленности, разрабатывающих РЛС «Створ», входили: Г. Н. Быстрое (главный конструктор), П. К. Панков, А. А. Терещенко, С. И. Портной (антенное устройство), Л. Н. Колтон и В. М. Сыромятников (приемное устройство), А. А. Шишагин (индикаторное устройство). По передающему устройству работал зам. главного конструктора П. К. Панков. Осенью 1956 г. приступили к серийному производству РЛС «Створ», которая широко использовалась на промысловых судах, судах речного флота и на некоторых малотоннажных судах морского флота. В 1957 г. взамен РЛС «Нептун» для крупнотоннажных и среднетоннажных судов коллективом радиоспециалистов во главе с главным конструктором М. Я. Бакшпун была разработана и в октябре 1957 г. прошла Государственные испытания новая судовая навигационная РЛС типа «Дон». Одновременно с разработкой РЛС «Дон» приступили к созданию более совершенной РЛС для малотоннажных и среднетоннажных судов взамен станций «Створ». В 1958 г. прошла Государственные испытания и с 1959 г. начала серийно выпускаться малогабаритная РЛС «Донец» («Донец-2»). Станция «Донец-2» являлась по существу модификацией РЛС «Дон» и предназначалась для установки на морских, речных и промысловых судах водоизмещением не менее 300 т. РЛС «Дон» и «Донец-2» являлись последними образцами РЛС первого поколения, выполненными на электровакуумных приборах с объемным монтажом элементов. В 1967 г. по заказу МРХ была создана серия РЛС второго поколения на новой элементной базе (полупроводниковые приборы, миниатюрные элементы, печатный монтаж). Первыми образцами РЛС этого поколения явились РЛС типа «Кивач» («Кивач-1» и «Кивач-2»). РЛС «Кивач-1» и «Кивач-2» предназначены для установки на малотоннажных и среднетоннажных судах. РЛС «Миус» («Кивач-3») была разработана в 1959 г. и предназначена для установки на судах водоизмещением более 300 т. Для установки на судах на подводных крыльях и на воздушной подушке в 1972 г. была разработана РЛС «Омега» (переименованная затем в «Грот»). В 1973 г. для оснащения средне тоннажных и крупнотоннажных судов была разработана серия унифицированных РЛС типа «Наяда», состоящая из базовой СНРЛС «Наяда-1» и трех ее модификаций: «Наяда-2», «Наяда-3», «Наяда-4» с различными характеристиками и функциональными возможностями. Все станции серии «Наяда» могут работать с устройством предупреждения столкновения судов типа «Альфа» (в настоящее время «Ольха»). Станции серии «Наяда» предназначены для установки на судах водоизмещением 500 per. т и выше. К концу 50-х гг. все наши морские транспортные, рыбопромысловые и многие суда речного флота были оснащены судовыми навигационными РЛС. Были приняты меры по совершенствованию эксплуатационно-технических характеристик, схем и конструкций этих радиолокационных станций («Дон», «Донец»). Однако за прошедшие годы в радиолокации был освоен диапазон миллиметровых радиоволн, появился известный опыт использования радиоволн 10-сантиметрового диапазона РЛС («Зарница») и т.д. Поэтому на основе исследований, проведенных в 1958—1959 гг. в ЦНИИМФе под руководством Р. Н. Черняева при участии Т. Т. Семикова и Р. П. Бибичковой в 1959 г. было разработано техническое задание на создание принципиально новой, двухдиапазонной РЛС, работающей на волнах 3,2 и 10 см. В 1961—1965 гг. по заданию ММФ была разработана и в 1968 г. стала серийно выпускаться двухдиапазопная РЛС, получившая название «Океан». Разработка РЛС «Океан» была осуществлена группой главного конструктора В. Ф. Волынца в составе А. В. Рудакова, В. В. Клавинга, М. П. Цибизова, В. В. Несонова. Иную позицию в этом вопросе заняли моряки, капитаны судов, сумевшие по достоинству оценить навигационные возможности новой РЛС. Особенно надо отметить принципиальную позицию в вопросе практического внедрения РЛС «Океан» капитана учебно-производственного судна теплохода «Зенит» П. Р. Папаева, длительное время участвовавшего в ходовых испытаниях этой станции в различных условиях плавания; капитана пассажирского теплохода «Михаил Калинин» В. И. Снопкова, который, например, используя достоинства режима ИД новой РЛС, при плавании в глубоководных шхерах имел возможность отказываться от лоцманской проводки, снижая тем самым валютные эксплуатационные расходы судна. Практически с момента организации серийного производства РЛС «Океан» направлялись в основном на комплектование вновь строящихся судов для ММФ и МРХ как на отечественных, так и на иностранных верфях. Некоторое количество этих станций было экспортировано в составе судов, построенных в СССР по заказу иностранных судовладельцев, например для шведской фирмы «Воллениус» (теплоход «Риголетто» и др.). По мере увеличения выпуска РЛС «Океан» снижалась ее стоимость, повышалась надежность работы и с 1970 г. РЛС «Океан» имела высшую категорию качества. На основании опыта эксплуатации была произведена модернизация схемы и конструкции РЛС «Океан» и взамен этой станции начала серийно выпускаться РЛС «Океан-М». В связи с этим во второй половине 70-х гг. ММФ был заключен договор на разработку двухдиапазонной автоматизированной РЛС «Океан-С», отвечающей требованиям и рекомендациям ИМО. Первоначально был разработан и подвергнут длительным испытаниям в различных условиях плавания на учебно-производственном судне «Профессор Рыбалтовский» индикатор автоматизированной РЛС, получивший название «Крон», который во время испытаний сопрягался с РЛС «Океан-М». Испытания проводились в феврале—июле 1979 г. в районах Балтийского, Северного и Средиземного морей и показали, что по своим навигационным возможностям индикатор «Крон» отвечал, а по некоторым параметрам превосходил лучшие зарубежные образцы.  Поэтому схемные и конструктивные решения, принятые в индикаторе, было рекомендовано использовать при разработке индикаторного устройства РЛС «Океан С». Поэтому схемные и конструктивные решения, принятые в индикаторе, было рекомендовано использовать при разработке индикаторного устройства РЛС «Океан С».В 1982 г. была закончена разработка и проведены Государственные испытания РЛС «Океан-С», а с 1983 г. началось серийное производство этого радиолокационного комплекса. РЛС «Океан-С» — поколение «Океанов» новой элементной базы. Использование микроэлементов в этой РЛС обеспечило возрастание информативности станции в 300 раз при сокращении материалов и энергоемкости. Проведенные исследования показали, что по эффективности использования РЛС «Океан-С» занимает второе место среди лучших 10 образцов аналогичных радиолокационных комплексов, разработанных в США, Японии, Италии, Норвегии, уступая первенство по этому параметру только японской модели «Ауторап». Кроме РЛС «Океан-С», были разработаны отечественные навигационные комплексы, где также осуществляется процесс автоматической обработки радиолокационной информации. Первой такой системой явился навигационный комплекс типа «Бриз-I», в состав которого входят: подсистема навигации и подсистема предупреждения столкновения судов. Как показали исследования, индикатор «Бриз-Е» по эффективности использования занимает четвертое место после моделей «Ауторап» (Япония), «Океан-С» (СССР), «Тонак» (Япония). Первая попытка применения БРЛС для проводки судов в порт и вывода из порта в условиях ограниченной видимости была осуществлена в порту Одесса в середине 50-х гг.. где для этой цели была установлена судовая РЛС «Нептун». Несмотря на не очень высокие точностные характеристики этой РЛС, использование ее для проводки судов показало целесообразность развития сети БРЛС. Группой радиоспециалистов промышленности под руководством М. И. Дубровского была разработана и в октябре 1960 г. прошла Государственные испытания на южном берегу Невской губы в районе Петродворца первая отечественная БРЛС «Раскат», установленная для обслуживания судов на подходе к Ленинградскому морскому торговому порту. В дальнейшем БРЛС «Раскат» были установлены в портах Жданов (Мариуполь), Мурманск, Ильичевск. В комплект БРЛС «Раскат» входили: антенно-волноводное устройство, два комплекта приемно-передающего устройства (рабочий и резервный), несколько ИСО, количество которых зависело от особенностей обслуживаемого района. Например, на БРЛС «Раскат» в Ленинградском порту установлено было шесть ИСО: три из них воспроизводили в масштабе 1:10000 почти всю открытую часть морского канала, а остальные три перекрывали часть канала, Кронштадтский фарватер и Большой Кронштадтский рейд с выходом к месту встречи лоцманов. Для контроля работы, кроме ИСО, обычно применялся ИКО. БРЛС «Раскат» имела следующие эксплуатационно-технические характеристики: длина волны 3,2 см; импульсная мощность передатчика 75 кВт; длительность зондирующих импульсов 0,05 мкс; частота посылки импульсов 1600 и 3200 имп с -1ширина диаграммы направленности антенны в горизонтальной плоскости на уровне 0,5 мощности — 0,4°, в вертикальной плоскости — 7°; дальность обнаружения и наблюдения крупно- и среднетоннажных судов (3000 т и более) составляет 18—20 миль при высоте антенны 25—27 м; связь с судами, взятыми под проводку, осуществляется с помощью радиотелефона. Опыт эксплуатации первой БРЛС «Раскат» в порту  Ленинград показал ее большую эффективность использования. Наиболее эффективно БРЛС используются в осенне-зимний период, когда ухудшаются условия плавания (осадки, туманы и пр.). Опыт показал, например, что успех зимних навигаций в Ленинградском порту во многом зависит от четкой работы БРЛС. Ленинград показал ее большую эффективность использования. Наиболее эффективно БРЛС используются в осенне-зимний период, когда ухудшаются условия плавания (осадки, туманы и пр.). Опыт показал, например, что успех зимних навигаций в Ленинградском порту во многом зависит от четкой работы БРЛС.Дальнейшее повышение разрешающей способности БРЛС по направлению и дальности практически ограничивается длиной волны. В диапазоне волн 3,2 см, на котором работает БРЛС, получение ширины диаграммы направленности антенны в горизонтальной плоскости менее 0,4° потребует значительного увеличения размеров раскрыва антенны, усложнения ее конструкции и пр. Поэтому практический интерес представляет использование БРЛС более коротких волн. В разработках судовых РЛС «Дон», «Донец», «Кивач», «Миус», «Наяда», «Наяда-5», «Енисей-Р», «Печора», «Океан», «Океан-М», «Океан-С», «Бриз-Е», БРЛС «Раскат» и внедрении этих станций на судах принимали участие представители ММФ: Р. Н. Черняев (ныне лауреат Государственной премии), Т. Т. Семиков, И. Д. Демин, В. И. Щеголев, В. И. Санников, В. Н. Васильев. Грамотная техническая эксплуатация и эффективное использование современных радионавигационных и радиолокационных приборов и систем на судах во многом зависит от подготовки штурманского состава и судовых радиоспециалистов в области радионавигации и радиолокации. Коллективами преподавателей учебных заведений, научных работников, специалистами Минморфлота проводилась и проводится большая работа по созданию соответствующих учебников, учебных пособий, практических руководств и другой научно-технической литературы по теории и практике средств радионавигации, радиолокации и их использованию в технике судовождения. Широко известны, например, работы в области судовых радионавигационных приборов и систем: Е. Я. Щеголева, М. Е. Старика, И. С. Кукеса, П. В. Кармалина, В. Б. Пестрякова, Ю. И. Никитенко, В. И. Быкова, А. Ф. Смирновского и др.; в области судовых навигационных радиолокационных станций и систем: И. В. Бренева, В. П. Благовещенского, В. И. Ракова, Р. Н. Черняева, В. Ф. Волынца, В. И. Власова, Я. И. Бермапа, А. В. Жерлакова, Н. Т. Ничипоренко и др.; в области вычислительной техники в судовождении: работы А. Е. Сазонова, Н. И. Бородина, 3. С. Кузина и др. Роль радионавигационных систем и устройств в судовождении Радионавигационные системы ближнего и дальнего действия Радионавигационные системы наземного и космического базирования Радиолокация импульсная и непрерывная (допплеровская) Радиолокация активная и пассивная Загоризонтная и сверхдальняя радиолокация Радиолокация дальнего и ближнего действия Радиолокационный ответ и опознавание Автоматическая идентификация Системы совместного действия (телевизионные, инфракрасные, тепловые, ультразвуковые, дальномеры и обнаружители) Системы управления судном и системы управления движением РЛС и САРП (САС, СЭП) Назначение - Судовая навигационная РЛС предназначена для обнаружения радиолокационных объектов, находящихся в пределах дальности радиолокационного обнаружения. На судне навигационная РЛС используется: в условиях ограниченной видимости; в условиях прибрежного плавания ( РЛС навигационный инструмент - точность определения угла 0.5 градуса и дистанции - 1 % от величины шкалы дальности); в сложных навигационных условиях. Принцип функционирования НРЛС. Используется принцип зондирования      Передающее Антенна Передающее Антеннаустройство передающая     Индикатор Приемное приемная Индикатор Приемное приемнаяУстройство Электромагнитная СВЧ энергия вырабатывается передатчиком, последовательность работы которого определяет синхронизатор, через антенный переключатель поступает в антенну, снабженную антенно-поворотным устройством, и излучается в эфир. Ответный эхо-сигнал через антенну и антенный переключатель попадает в приемник, где преобразуется и усиливается и поступает в индикаторное устройство. В индикаторном устройстве электрические сигналы выводятся в удобном для оператора наглядном виде, формируется дополнительная служебная информация производятся замеры и вычисления. Структурно-функциональная схема станции. 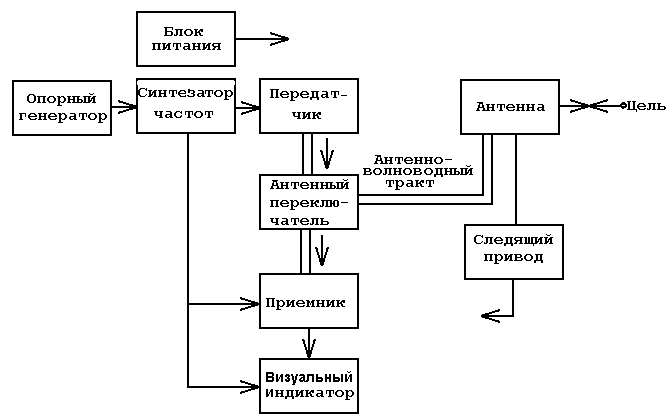 Основные узлы передатчика - подмодулятор, модулятор, магнетрон. Основные узлы приемника - супергетеродинный приемник с амплитудным детектором с регулировкой усиления и логарифмическими усилителями в цепи приема эхо-сигнала, видеоусилитель, схема АПЧ и возможностью РПЧ, цепи МПВ. Приемник с передатчиком выполняется моноблоком с двумя видами исполнения - подпалубного и надпалубного размещения (совмещенный с антенно-поворотным устройством). Индикаторное устройство - сложное электротехническое устройство выполняющее преобразование электрических сигналов в визуальную форму, формирование служебной информации, синхронизации в некоторых случаях, получение информации от других датчиков навигационной информации (лаг, гирокомпас, ПИ РНС). Различают аналоговые и цифровые индикаторные устройства. Цифровые индикаторные устройства представляют из себя одно или более специализированных вычислительных устройств, позволяющих реализовывать функции аналогового индикаторного устройства и решать дополнительные навигационные задачи (расчеты формуляров целей, захваты и сопровождения целей, классификации целей, проигрывание ситуаций, совмещение с картографической информацией и др.). Антенно-поворотное устройство обеспечивает вращение антенного устройства, формирование и передачу в индикаторное устройство текущего угла поворота антенны. Антенный переключатель обеспечивает канализацию электромагнитной энергии между антенной приемником и передатчиком. Особенности процессов излучения, распространения, отражения и приема радиоволн. Особенности излучения СВЧ энергии - волноводы прямоугольные, гофрированные, коаксиальные линии, специальные антенные системы. Антенны - рупорные, зеркальные, щелевые, комбинированные. Радиопрозрачное покрытие. Предельно допустимые нормы на электромагнитное излучение. Электроманитная СВЧ энергия распространяется прямолинейно и бесконечно, имеет свойство отражаться и рассеиваться от различных препятсвий. Рефракция атмосферы - изменение прямолинейности распространения электромагнитной энергии. Нормальная рефракция атмосферы (РЛС “видит” на 5 - 15 процентов дальше человеческого глаза в хорошую погоду). Виды рефракции атмосферы: 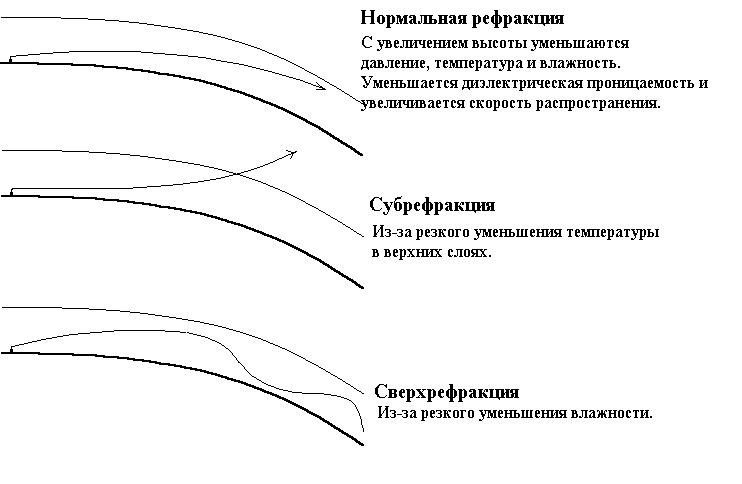 Принцип измерения дальности в НРЛС. Неподвижные кольца дальности (НКД) - грубая оценка дальности до цели. Подвижное кольцо дальности (ПКД) - точное измерение дальности до цели. Электронный визир дальности (ЭВД) - измерение дальности ЭВМ. Подвижный визир дальности (ПВД). Принцип измерения направления в НРЛС. Механический визир отсчета направлений (МВН) Электронный визир отсчета направлений (ЭВН) Отметка курса (ОК). Принципы формирования радиолокационной картины. Ориентации изображения «Курс- HEAD UP» - влияние рысканий курса судна «Север - NORTH UP» - согласование с гирокомпасом (ГК) «Курс стабилизированный - COURSE UP». Индикации движения «ОД» (относительное движение) и «ИД» (истинное движение); особенности формирования и использования; коррекция данных курса и скорости, вводимых при ИД в индикатор от ГК и ЛАГа. Особенности радиолокационной картины; береговые объекты естественного и искусственного происхождения; отличия радиолокационной картины от навигационной карты. Отражающие свойства различных типов объектов - зависят от формы, ракурса, материала и т.д. ЭПР уголкового отражателя (сторона 43 см) примерно 149 кв.м; ЭПР катера высотой 4 м 75-250 кв.м; ЭПР среднего судна высотой 4-6 метров 12000-30000 кв.м; ЭПР крупного судна высотой 14-20 метров 30000-50000 кв.м; ЭПР человека 0.8 кв.м. Радиолокационные уголковые отражатели. Основные технические характеристики НРЛС: включают в себя технические характеристики передатчика (импульсная мощность, длина волны излучения, длительность зондирующего импульса, период повторения импульсов), приемника (чувствительность, динамический диапазон, избирательность), антенного устройства (ширина диаграммы направлености, коэффициент усиления, скорость вращения антенны), индикаторного устройства (диаметр радиолокационного изображения, диаметр рисующего пятна). Импульсная мощность - мощность, излучаемая РЛС в эфир. Составляет от 1…100 кВт. Иногда применяется средняя мощность - пересчитывается через длительность и период повторения импульсов. Большая мощность - большая дальность действия. Излучаемая мощность НРЛС определяется мощностью магнетрона, длиной антенно-волноводного тракта, типом антенного устройства. Длина волны излучения - характеристика, описывающая применяемые для излучения диапазон радиоволны. Каждая НРЛС работает на своей частоте данного диапазона. Применяется частота излучения. (Произведение длины волны на частоту = скорость света). Применяемые длины волн - 3 см (Х band), 10 см (S band), 8 мм о др (соответственно около 9000, 3000, 37500 МГц). Трехсантиметровый диапазон - большая точность, большее затухание в гидрометеорах. Десяти сантиметровый диапазон - меньшая точность, большая помехоустойчивость. Миллиметровый диапазон еще большая точность, еще меньшая помехоустойчивость. РЛС трехсантиметрового диапазона - обязательна на судне (применение РЛО), десятисантиметровый диапазон применяется в плохую погоду, миллиметровый диапазон - для высокоточного определения местоположения (СУДС, швартовка и др.). Длительность излучаемых импульсов - время, которое НРЛС работает на излучение. Зависит от выбранной шкалы дальности, влияет на разрешающую способность по дальности. На современных НРЛС имеется возможность переключения длительности импульсов-режимов (SP - "короткий" импульс, MP - "средний" импульс, LP - "длинный" импульс). "Короткие" импульсы используются на малых шкалах дальности, "Длинные" - на больших. В НРЛС используются длительности от десятков наносекунд, до единиц микросекунд. Период следования излучаемых импульсов - период повторения импульсов - период, через который НРЛС излучает мощность в пространство. Выбирается из соображения дальности действия станции (выбранной шкалы дальности). Составляет от сотен Гц до единиц кГц. Ширина диаграммы направленности антенны (ДНА) в горизонтальной и вертикальной плоскостях 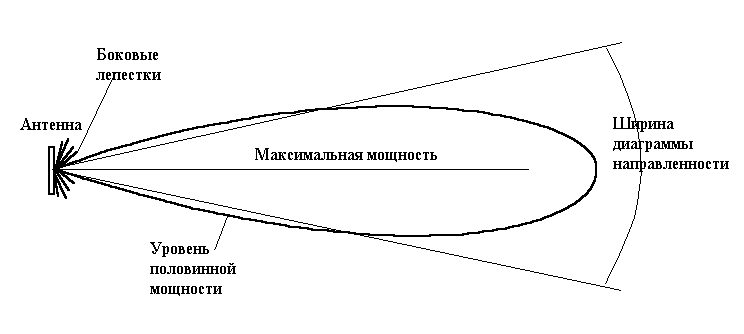 . Для 3 см диапазона ширина диаграммы направленности в горизонтальной плоскости 0.1 - 0.5 градусов; для 10 см - 1.2 - 2 градуса (конструктивные особенности антенны). Для 3 см и 10 см ширина диаграммы направленности в вертикальной плоскости составляет около 20 градусов, что связано с качкой судна (для береговых РЛС должна быть 5 -7 градусов). Чувствительность РЛС и приемника - характеристика, показывающая, какой минимальный сигнал может быть на входе приемника для работы НРЛС. Диаметр и рабочий диаметр экрана - характеристика, описывающая диаметр радиолокационного изображения, выводимого на экран. Зависит от тоннажа судна. Бывает 180, 250, 320 мм. На береговых индикаторах может применяться прямоугольное изображение. Свободная часть экрана может использоваться для служебной информации. Диаметр рисующего пятна - для монохромных индикаторов может составлять до 0,1 мм, для дисплеев разрешение экрана VGA, SVGA и др. Диаметр рисующего пятна зависит от яркости, фокусировки, расстояния от центра экрана. Наибольшие потери информации - на индикаторном устройстве. При настройке аналоговых индикаторов особое внимание настройке регулировок, яркость, фокусировка, контрастность и др. Основные эксплуатационные характеристики НРЛС: Погрешности измерения координат
Минимальная дальность действия - определяется длительностью зондирующего импульса и составляет 150 м для длительности 1 мкс (15 м для 0,1 мкс). Минимальная дальность обнаружения - характеристика, учитывающая длительность зондирующего импульса и время восстановления чувствительности, зависит от шкалы дальности (длительности импульса). Составляет десятки метров. Мертвая зона - зона определяемая высотой установки антенны и шириной диаграммы направленности. Теневые секторы в горизонтальной и вертикальной плоскости - секторы радиолокационного наблюдения, которые имеют зоны радиотени от мачт, труб, надстроек. 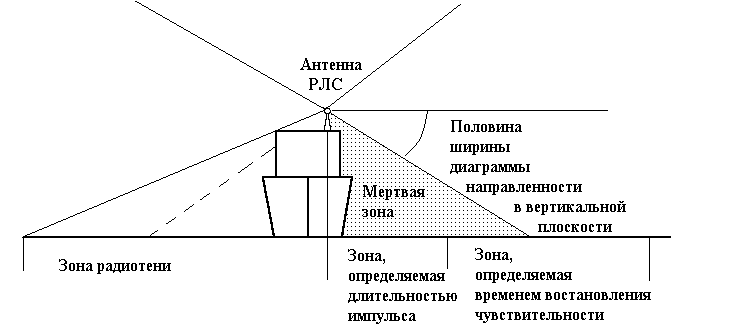 График теневых секторов в горизонтальной плоскости:
График радиодевиации НРЛС. Максимальная дальность действия - ограничивается периодом повторения импульсов (составляет 27 миль на шкале 1 миля РЛС НАЯДА-5), зависит от мощности, чувствительности, коэф-та усиления антенны, кпд передающего и приемного тракта, длины волны, ЭПР объекта и др. 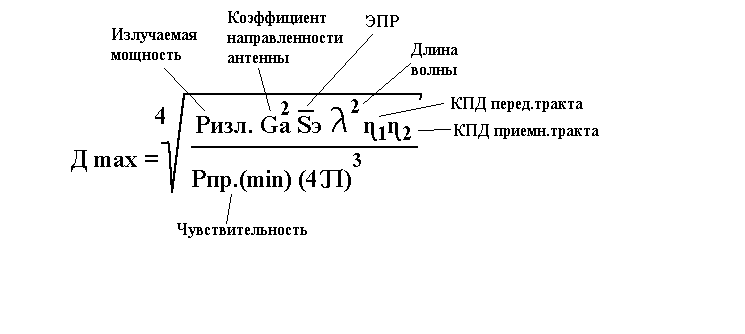 Максимальная дальности обнаружения объектов - зависит от высоты установки антенны, рефракции атмосферы, характеристик облучаемого объекта, длины антенно-волноводного тракта, настройки РЛС. Вероятностная характеристика. Влияние загиба земли - дальность обнаружения объектов ограничивается загибом земли. Dmax(км)=4.12 ( h1(м) + h2(м)) Dmax(nm)=2.22 ( h1(м) + h2(м)) Влияние подстилающей поверхности - убывание сигнала при увеличении расстояния до объекта происходит по синусоидальному закону. Разрешающая способность станции по дальности - характеристика, зависящая от длительности импульса, диаметра рисующего пятна, расстояния до цели. Указывает минимальное расстояние между целями, при котором они наблюдаются раздельно на экране. Разрешающая способность по направлению зависит от ширины диаграммы направленности в горизонтальной плоскости, диаметра рисующего пятна. Указывает минимальное расстояние между двумя целями, находящимися на одинаковом расстоянии, при котором они наблюдаются раздельно. Эксплуатационные характеристики связаны с техническими характеристиками СН РЛС и наблюдаемыми объектами. Эксплуатационные характеристики зависят от регулировок СН РЛС. Требования IMO к НРЛС. (В соответствии с резолюциями ИМО) Дальности обнаружения (При нормальных условиях распространения радиоволн, высоте установки РЛС 15 м над уровнем моря и при отсутствии помех РЛС) Береговой черты
Надводных объектов
Минимальная дальность обнаружения. Надводные объекты начиная с минимального расстояния 50 м Отображение информации В условиях дневного освещения без применения внешних увеличительных устройств индикатор должен обеспечивать отображение радиолокационной информации на экране с минимальным эффективным диаметром (в пределах азимутальной шкалы) не менее, чем: 180 мм для судов валовой вместимостью 150 и более, но менее 1000 ; 250 мм для судов валовой вместимостью 1000 и более, но менее 10000; 320 мм для судов валовой вместимостью 10000 и более. Набор шкал дальности индикатора Индикатор должен обеспечивать следующий набор шкал дальности: 0,25; 0,5; 0,75; 1,5; 3; 6; 12 и 24 мили. Могут быть предусмотрены более крупные и более мелкие шкалы дальности. Индикация шкал дальности В РЛС должна обеспечиваться четкая индикация выбранной шкалы дальности и интервал между НКД. Вид информации, высвечиваемой на эффективной площади радиолокационного изображения В пределах эффективной площади радиолокационного изображения должна отображаться только та информация, которая относится к судовождению и которая связана непосредственно с изображением целей (идентификаторы, векторы). Воспроизведение шкалы дальности Шкала дальности (радиолокационное изображение) должна начинаться от своего судна, быть линейной и воспроизводиться без задержки. Многоцветность изображения на экране Разрешается применение многоцветных экранов, отвечающих следующим требованиям:
Восприимчивость информации при изменении освещенности Радиолокационное изображение и информация должны легко восприниматься при любой освещенности. Если для облегчения работы с индикатором при высокой освещенности необходим защитный экран (тубус), то должны предусмотрены средства для его быстрой установки и снятия. Изображение системной электронной карты Избранные части информации системной электронной навигационной карты (СЭНК) могут отображаться на экране, но таким образом, чтобы обеспечить отсутствие маскировки, затенения и ухудшения основной информации. СЭНК выводит на экран индикатора:
Мореплаватель должен иметь возможность выбора частей СЭНК. Представление информации должно быть выполнено в общей опорной и координатной системе. РЛС и картографическая информация СЭНК должна отображаться в пределах всей площади изображения. Измерение дальности На шкалах дальности 0,25; 0,5; 0,75 миль - два НКД (но не более шести колец), а на остальных шкалах дальности – до шести НКД. ПКД - в форме кольца должен иметь цифровой отсчет дальности. Отметка курса Курс судна должен отображаться на экране непрерывной линией с максимальной погрешностью не более 1о. Измерение направлений ЭВН должен обеспечивать измерение направления на цель с максимальной погрешностью 1о. ЭВН должен обеспечиваться измерения направления относительно линии ОК – курсовой угол и относительно направления истинного меридиана (СЕВЕР) – истинный пеленг. Разрешающая способность по дальности РЛС должна обеспечивать на шкале 1,5 мили раздельное отображение на экране двух одинаковых небольших целей, расположенных на одном пеленге, на дальности 50...100 % от номинала шкалы при расстоянии между целями не более 40 м. Разрешающая способность по пеленгу РЛС должна обеспечивать на шкале дальности 1,5 мили раздельное отображение на экране двух одинаковых небольших целей, расположенных на одинаковой дальности, в пределах 50...100% от номинала шкалы и различающихся по угловому положению не более, чем 2,5о. Влияние качки Параметры РЛС должны быть такими, чтобы при качке (бортовой или килевой) до 10о включительно, эксплуатационные требования по дальности обнаружения удовлетворяли предшествующим пунктам. Скорость вращения антенны. Скорость вращения антенны должна быть не менее 20 об/мин. Поляризация радиоволн Все РЛС, работающие в диапазоне 9 ГГц, должны работать с горизонтальной поляризацией радиоволн. Режимы работы РЛС должна обеспечивать работу в режиме относительного и истинного движения. Интерфейс РЛС должна обеспечивать прием информации от такого оборудования как гирокомпас, оборудования для измерения скорости и пройденного расстояния и электронных систем местоопределения в соответствии с международными требованиями (МЭК 1162). Радиолокационная прокладка Электронное средство прокладки (ЭСП - СЭП) ETA Средство автосопровождения (САС) АТА Средство автоматической радиолокационной прокладки (САРП) ARPA - экран 250 мм. Суда валовой вместимостью 10000 и более должны иметь САРП с диаметром экрана 320 мм. - индикация следов радиолокационных эхосигналов целей (прошлые положения целей в виде синтезированного послесвечения). Эти следы могут отображать истинное или относительное перемещение целей. При этом истинные следы могут быть стабилизированы относительно воды или грунта. Следы целей должны отличаться от действительных эхо-сигналов целей. Эргономические характеристики Должен обеспечиваться непосредственный доступ и возможность немедленного выполнения следующих функций :
Символы, применяемые в РЛС (Резолюция А.278 (VIII) принятая 20.11.1973)
|