Маркерные радиомаяки приводные радиостанции спутниковая система навигации
 Скачать 349.06 Kb. Скачать 349.06 Kb.
|

 ВОПРОСЫ ВОПРОСЫ
Обзорный радиолокатор аэродромный предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов в районе аэродрома с последующей передачей информации о воздушной обстановке в центры (пункты) ОВД для целей контроля и обеспечения управления воздушным движением. Период обновления информации составляет не более 6 секунд. Допускается отсутствие радиолокационной информации от ОРЛ-А в трех-пяти обзорах подряд от воздушного судна, совершающего маневр разворота или находящегося на участке с тангенциальным направлением скорости при выполнении полета по стандартному маршруту захода на посадку. Антенная система ОРЛ-А юстируется относительно магнитного меридиана. Радиолокационная информация ОРЛ-А может использоваться для целей контроля и управления воздушным движением во внеаэродромной зоне (на воздушных трассах и вне трасс) в районных центрах управления воздушным движением. В этом случае координатная информация (азимутальная), предназначенная для районного центра, пересчитывается относительно истинного меридиана оборудованием обработки ОРЛ-А или оборудованием управления воздушным движения районного центра или другим специальным оборудованием. ОРЛ-А должен быть расположен таким образом, чтобы обеспечивался РЛК за полётами ВС на контролируемых маршрутах в районе данного аэродрома. В СПб на одной позиции расположено два ОРЛ-А, основной ЛИРА А-10 и резервный ИРТЫШ, который заменяет основной 2 раза в месяц на время тех. проверок ЛИРА А-10. Расположены на возвышенности на территории Южного кладбища. В состав оборудования ОРЛ-А должно входить:
Аэродромный РЛК "ЛИРА-А10" АРЛК "ЛИРА-А10" предназначен для использования в качестве источника радиолокационной информации о воздушной обстановке в зоне аэропортов для автоматизированных и неавтоматизированных систем УВД и обеспечивает: определение координат и траекторий движения воздушных судов (ВС) - как оборудованных, так и не оборудованных ответчиками; запрос, получение и выдачу информации, выдаваемой бортовыми ответчиками ВС по стандарту ИКАО и по ГОСТ 21800-89; сопряжение и выдачу информации потребителям насистемы УВД "Синтез", "Спектр", "Старт", "Норд" ("Альфа"), "ТОПАЗ", "Карм-АУ", "Карм-ДРУ" или на другие по заказу потребителя. РЛК "ЛИРА-А10" является высокостабильной системой с использованием когерентных методов подавления мешающих отражений и состоит из: антенного модуля, состоящего из отражателя, двухканального облучателя, поляризатора, опорно-поворотного устройства, токосъемника, вращающего сочленения, приводов азимутального вращения и сборной башни высотой до 9 м, в зависимости от радиолокационной позиции, набираемой секциями по 3 м; аппаратного модуля, включающего в себя передающую систему на базе клистронного усилителя, состоящую из двух независимых каналов, работающих на разных частотах, приемную систему, цифровую систему обработки сигнала с адаптивным управлением, систему автоматизированного контроля, систему электропитания и встроенный вторичный радиолокатор; резервную дизельэлектростанцию. Основные тактико-технические характеристики трассового радиолокационного комплекса "ЛИРА-А10": 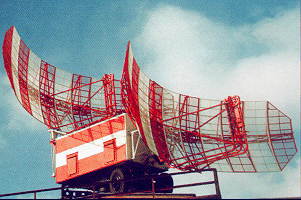
Изготовитель КБ Лира(Россия). Также широко используются аэродромные локаторы КБ Лира типа Лира 1, Утёс-А. Стоит отметить Челябинский радиозавод «Пилот» производящий РЛ А "ОРЛ-85М" и Экран-85. Основные характеристики ОРЛ-А
Обзорный радиолокатор трассовый предназначен для обнаружения и определения координат (азимут - дальность) воздушных судов во внеаэродромной зоне (на воздушных трассах и вне трасс) с последующей выдачей информации о воздушной обстановке в центры (пункты) обслуживания воздушного движения для целей контроля и обеспечения управления воздушным движением. Антенная система обзорного радиолокатора трассового юстируется относительно истинного меридиана. ОРЛ-Т должен быть размещен таким образом, чтобы обеспечить радиолокационный контроль за полётами ВС в секторах прохождения воздушных трасс данного района УВД. Место установки должно выбираться так, чтобы обеспечивался минимум переотражений по вторичному каналу (если оснащен ВРЛ). Переотражение не должно попадать в зону контролируемых ВТ. В Пулково используется Утёс-Т, работающий как по первичному(Утес), так и вторичному каналу(Лира),и расположен на территории Южного кладбища на возвышенности. В состав оборудования ОРЛ-Т должно входить:
Основные характеристики ОРЛ-Т
Трассовый обзорный радиолокатор Утёс-Т Первичный трассовый обзорный радиолокатор комплекса УТЕС-Т работает в диапазоне дециметровых волн и является высокостабильным радиолокационным комплексом, построенным по принципу истинной когерентности. РЛК «УТЕС-Т» может комплектоваться встроенным ВРЛ. Двулучевая антенная система формирует зоны обзора в вертикальной плоскости в диапазоне от 0,5° до 45°. В горизонтальной плоскости зона обзора обеспечивается механическим вращением антенны со скоростью 6 об/мин. Вычислительное устройство позволяет вычислить координаты ВС и формирует контуры метеообразований в шести градациях. Головной процессор объединяет отметки ПРЛ и ВРЛ, выполняя функции вторичной обработки информации. Автоматизированная система контроля и управления режимами работы РЛК производится как с местного пульта, так и дистанционно. Встроенное контрольное оборудование позволяет осуществлять диагностику и поиски неисправностей. Высокая степень автоматизации РЛК наряду с его высокой надежностью обеспечивает возможность работы без постоянного присутствия на РЛК позиции персонала.
Вторичный радиолокатор предназначен для обнаружения, определения координат (азимут-дальность), запроса и приема дополнительной информации от воздушных судов, оборудованных ответчиками, с последующей выдачей информации в центры (пункты) ОВД. Участок ВРЛ должен быть размещен таким образом, чтобы обеспечить непрерывный РЛК ВС, оборудованным самолётными ответчиками на контролируемых маршрутах. В секторах прохождения основных контролируемых трасс величины углов закрытия по углу места с высоты расположения фазового центра не должны превышать 0,5°. В радиусе 1,5км от места размещения ВРЛ не должно быть крупных металлических и железобетонных конструкций и сооружений, которые могут создавать переотраженные сигналы по вторичному каналу радиолокатора. Основные характеристики:
Принцип работы: Запросчик с помощью основной антенны, вращающейся по азимуту запрашивает коды на частотах запроса. Эти запросы принимаются ненаправленными антеннами(Ответчиками). В приёмоответчике ВС формируется ответ на запрос, который излучается этими же антеннами в воздушном пространстве на частоте ответа. Ответная информация содержится в кодированном виде и принимается основной и антенной подавления. После преобразований информация подаётся в групповую аппаратуру КДП. После расшифровки в соответствии с режимом выдаётся инф: А) Отметка РЛ и сведения о номере сквока рейса(4 цифры) С) В этом режиме передаются сведения о барометрической высоте S) Адресная информация отдельному ВС содержащая всю вышеперечисленную инф. D) Комбо режим Существует два запросных кода для ВРЛ работающего в режиме УВД При запросе кода БН ответчика на индикаторе диспетчера высвечивается номер борта При запросе ТИ ответчик отвечает текущую высоту в метрах(Границы от 300-400 до 30000м), сведения о запасе топлива, Признак высоты либо Авария. Система ВРЛ имеет основной недостаток- вредное влияние боковых и задних лепестков диаграммы направленности(20% мощности), поэтому устанавливается защита от влияния боковых лепестков по каналу запрос-ответ. Существующая система ВРЛ является неселективной. В результате Запрос -Ответа образуется очередь ответов и диспетчер вынужден выбирать то ВС, которое ему нужно. Для УВД используется автономный ВРЛ и ВРЛ встроенные в ПРЛ Диаграммы направленности в вертикальной плоскости совмещаются для ВРЛ встроенного в ПРЛ. ОВРЛ:
Встроенные ВРЛ
Многопозиционные системы наблюдения (МПСН), основанные на многопозиционных технологиях АЗН-В, активно используются в качестве высокоточного источника информации о воздушной обстановке в аэропортовых, аэродромных и трассовых зонах УВД. Наземная станция аэродромной многопозиционной системы наблюдения(АМПСН) предназначена для определения местоположения и управления движением воздушных судов, спецавтотранспортом, техническими средствами и другими объектами, оборудованных ответчиками, находящихся на посадочной прямой и рабочей площади аэродрома (площади маневрирования и перроне, на взлетно- посадочной полосе, рулежных дорожках и местах стоянок воздушных судов). Московский аэропорт Домодедово первым в России устанавливает аэродромную многопозиционную систему наблюдения. Установка АМПСН и ее интеграция в уже работающую в Домодедово систему A-SMGCS (Усовершенствованная система управления наземным движением и контроля за ним) является наилучшим решением обеспечения контроля за наземным движением на аэродроме. Объединенные функции двух систем обеспечат наиболее полное и точное отображение на мониторах диспетчеров вышки УВД местоположения и передвижения самолетов и транспортных средств на взлетно-посадочных полосах, рулежных дорожках и перронах аэропорта. В основе новой системы лежит развертывание сети наземных станций системы АМПСН, рассредоточенных по всему аэродрому, стойки центральной обработки информации и 150 маяков (передающих устройств), установленных на спецтранспорт. МПСН «Мера» от ВНИИРА сконструирована таким образом, чтобы отвечать всем современным требованиям, предъявленным к системам наблюдения, и азработана в двух исполнениях
Наземная станция широкозонной многопозиционной системы наблюдения предназначена для определения местоположения и управления движением воздушных судов оборудованных бортовыми ответчиками работающими в международном диапазоне (в режимах А/С и S) в верхнем и нижнем воздушном пространстве. Концерн ПВО "Алмаз-Антей" успешно завершил в аэропорту Пулково (Санкт-Петербург) государственные испытания широкозонной многопозиционной системы наблюдения (МПСН) "Мера", которая была развернута в 2012 г. для организации наблюдения за воздушным пространством в районе Санкт-Петербурга. Но система может быть установлена как в маленьких, так и в крупных аэропортах, а также в местах со сложным рельефом местности. Основные отличия активной МПСН от ВРЛ режима S
Основные подсистемы МПСН «Мера»
Для WAM- способность спутниковой синхронизации времени
Наземная станция контрактного автоматического зависимого наблюдения предназначена для наблюдения за воздушными судами при приеме информации с борта воздушного судна, имеющего соглашение на передачу данной информации конкретному органу управления воздушным движением. Информация о местоположении формируется на борту воздушного судна и передается по линиям передачи данных следующих типов:
Информация, после ее обработки по наземным сетям связи доставляется в орган управления воздушного движения, под управлением которого в данный момент времени находится воздушное судно. Технология АЗН-К является самым простым по структуре вариантом автоматического зависимого наблюдения и представляет собой, по сути дела, обобщение принципа вторичной радиолокации. ВРЛ постоянно посылает запросы, а бортовой трансивер ВС посылает затребованную информацию. Т.о. ВРЛ связан с ВС по низкоскоростной ЛПД, образованной по принципу запрос-ответ. Если предположить, что антенна локатора ненаправленная и широковещательный запрос вызвал поток ответов от ВС. Декодировать этот потом невозможно из-за наложения, поэтому локатор должен посылать бортам не широковещательные, а адресные запросы. Именно на этом принципе основана технология АЗН-К. Автоматическая передача данных с борта начинается после того как ВС (эксплуатант) и орган УВД подписались на получение этих данных. Содержимое и частота посылок определяются контрактом. Еще до появления стандартов ICAO в США была сделана попытка реализации АЗН-К, в результате чего появились комплекты бортового оборудования FANS-1 FANS-2. В РФ применение этой системы планируется в Дальневосточном и Арктическом регионах. Деятельность по внедрению системы FANS началась с установки в РГП «Магаданэроконтроль» оборудование FANS фирмы ARING. Однако система оказалась несовместимой с появившимися позднее стандартами ICAO. Поэтому систему могут использовать только в Океанических и малонаселённых регионах. |