лекции теор. мех (копия). Предмет теоретической механики изучение механического движения и механического взаимодействия материальных тел
 Скачать 0.97 Mb. Скачать 0.97 Mb.
|

|
Предмет теоретической механики – изучение механического движения и механического взаимодействия материальных тел. Современная техника ставит множество задач, решение которых связано с исследованием так называемого механического движения и механического взаимодействия материальных тел. Механическим движением называют происходящее с течением времени изменение взаимного положения материальных тел в пространстве. Под механическим взаимодействием понимают те действия материальных тел друг на друга, в результате которых происходит изменение движения этих тел или изменение их формы. За основную меру этих действий принимают величину, называемую силой. Краткая характеристика задач, решаемых в теоретической механике. Фундаментальные модели и определения. Наука о механическом движении и взаимодействии материальных тел и называется механикой. Круг проблем, рассматриваемых в механике, очень велик и с развитием этой науки в ней появился целый ряд самостоятельных областей, связанных с изучением механики твердых деформируемых тел, жидкостей и газов. К этим областям относятся теория упругости, теория пластичности, гидромеханика, аэромеханика, газовая динамика и ряд разделов прикладной механики, в частности: сопротивление материалов, статика сооружений, теория механизмов и машин, гидравлика, а также многие специальные инженерные дисциплины. Во всех этих областях наряду со специфическими для каждой из них закономерностями и методами исследованиями опираются на ряд основных законов или принципов и используют многие понятия и методы, общие для всех областей механики. Рассмотрение этих общих понятий, законов и методов и составляет предмет так называемой теоретической механики. Структура курса теоретической механики и содержание ее разделов. По характеру рассматриваемых задач механику принято разделять на статику, кинематику и динамику. В статике излагается учение о силах и об условиях равновесия материальных тел под действием сил. В кинематике рассматриваются общие геометрические свойства движения тел. Наконец, в динамике изучается движение материальных тел под действием сил. Основные исторические этапы развития механики. В основе механики лежат законы, называемые законами классической механики (или законами Ньютона), которые установлены путем обобщения результатов многочисленных опытов и наблюдений. Возникновение и развитие механики * как науки неразрывно связано с историей развития производительных сил общества, с уровнем производства и техники на каждом этапе этого развития. (* Термин «механика» впервые появляется в сочинениях одного из выдающихся философов древности Аристотеля c 84-322 г. до н. э. и происходит от греческого mechane, означающего по современным понятиям «сооружение», «машина»). В древние времена, когда запросы производства сводились главным образом к удовлетворению нужд строительной техники, начинает развиваться учение о так называемых простейших машинах (блок, ворот, рычаг, наклонная плоскость) и общее учение о равновесии тел (статика). Обоснование начал статики содержится уже в сочинениях одного из великих ученых древности Архимеда B 87-212 г. до н. э.). Развитие динамики начинается значительно позже. В XV—XVI столетиях возникновение и рост в странах Западной и Центральной Европы буржуазных отношений послужили толчком к значительному подъему ремесел, торговли, мореплавания и военного дела (появление огнестрельного оружия), а также к важным астрономическим открытиям. Все это способствовало накоплению большого опытного материала, систематизация и обобщение которого привели в XVII столетии к. открытию законов динамики. Главные заслуги в создании основ динамики принадлежат гениальным исследователям Галилео Галилею (564-1642) и Исааку Ньютону (643—1727). В сочинении Ньютона «Математические начала натуральной философии», изданном в 1687 г., и были изложены в систематическом виде основные законы классической механики (законы Ньютона). В XVIII в. начинается интенсивное развитие в механике аналитических методов, т. е. методов, основанных на применении дифференциального и интегрального исчислений. Методы решения задач динамики точки и твердого тела путем составления и интегрирования соответствующих дифференциальных уравнений были разработаны великим математиком и механиком Л. Эйлером (707—1783). Из других исследований в этой области наибольшее значение для развития механики имели труды выдающихся французских ученых Ж. Даламбера (717—1783), предложившего свой известный принцип решения задач динамики, и Ж. Лагранжа (736—1813), разработавшего общий аналитический метод решения задач динамики на основе принципа Даламбера и принципа возможных перемещений. В настоящее время аналитические методы решения задач являются в динамике основными. Кинематика, как отдельный раздел механики, выделилась лишь в XIX в. под влиянием запросов развивающегося машиностроения. В настоящее время кинематика имеет и большое самостоятельное значение для изучения движения механизмов и машин. В России на развитие первых исследований по механике большое влияние оказали труды гениального ученого и мыслителя М. В. Ломоносова (711—1765), а также творчество Л. Эйлера, долгое время жившего в России и работавшего в Петербургской академии наук. Из многочисленных отечественных ученых, внесших значительный вклад в развитие различных областей механики, прежде всего должны быть названы: М. В. Остроградский (801—1861), которому принадлежит ряд важных исследований по аналитическим методам решения задач механики; П. Л. Чебышев (821—1894), создавший новое направление в исследовании движения механизмов; С. В. Ковалевская (850—1891), решившая одну из труднейших задач динамики твердого тела; А. М. Ляпунов (857—1918), который дал строгую постановку одной из фундаментальных задач механики и всего естествознания — задачи об устойчивости равновесия и движения и разработал наиболее общие методы ее решения; И. В. Мещерский (859—1935), внесший большой вклад в решение задач механики тел переменной массы; К. Э. Циолковский (857—1935), автор ряда фундаментальных исследований по теории реактивного движения; А. Н. Крылов (863—1945), разработавший теорию корабля и много внесший в развитие теории гироскопа и гироскопических приборов. Выдающееся значение для дальнейшего развития механики имели труды «отца русской авиации» Н. Е. Жуковского (847—1921) и его ближайшего ученика основоположника газовой динамики С. А. Чаплыгина (869—1942). Характерной чертой творчества Н. Е. Жуковского было приложение методов механики к решению актуальных технических задач, примером чему служат многие его труды по динамике самолета, разработанная им теория гидравлического удара в трубах и др. Большое влияние идеи Н. Е. Жуковского оказали и на преподавание механики в высших технических учебных заведениях нашей страны. В наши дни перед отечественной наукой и техникой стоят важные задачи по ускорению научно-технического прогресса и дальнейшему развитию и совершенствованию социалистического производcтва. В числе этих задач такие актуальные проблемы, как автоматизация производственных процессов и их оптимизация, создание и внедрение промышленных роботов, эффективное использование всех конструкционных материалов и многие другие. Для решения этих задач важное значение имеет дальнейшее повышение качества подготовки инженерных кадров, расширение теоретической базы их знаний, в том числе и знаний в области одной из фундаментальных общенаучных дисциплин — теоретической механики. ВВЕДЕНИЕ В СТАТИКУ. Предмет статики. Основные понятия: абсолютно твердое тело, сила, эквивалентные и уравновешенные системы сил, равнодействующая. Статикой называется раздел механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил. Под равновесием будем понимать состояние покоя тела по отношению к другим телам, например по отношению к Земле. Все встречающиеся в природе твердые тела под влиянием внешних воздействий деформируются. Допустимо пренебрегать малыми деформациями соответствующих твердых тел и рассматривать их как недеформируемые или абсолютно твердые. Абсолютно твердым телом называют такое тело, расстояние между каждыми двумя точками которого всегда остается постоянным. Величина, являющаяся основной мерой механического взаимодействия материальных тел, называется в механике силой.  Рассматриваемые в механике величины можно разделить на скалярные, т. е. такие, которые полностью характеризуются их числовым значением, и векторные, т. е. такие, которые помимо числового значения характеризуются еще и направлением в пространстве. Рассматриваемые в механике величины можно разделить на скалярные, т. е. такие, которые полностью характеризуются их числовым значением, и векторные, т. е. такие, которые помимо числового значения характеризуются еще и направлением в пространстве.Сила – величина векторная. Ее действие на тело определяется: 1) числовым, значением или модулем силы, 2) направлением силы, 3) точкой приложения силы. Основной единицей измерения силы в Международной системе единиц (СИ), которой мы будем пользоваться, является 1 ньютон (1 Н). Графически сила, как и другие векторы, изображается направленным отрезком (рис. 1.1). Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующейданной системы сил. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой. 6. Аксиомы статики. Статику можно излагать исходя из некоторых общих законов механики и положений, называемых аксиомами или принципами статики. Аксиома 1. Закон инерции. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1=F2) и направлены вдоль одной прямой в противоположные стороны (рис. 1.2). Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменяется, если к ней прибавить или от нее отнять уравновешенную систему сил (рис. 1.3). 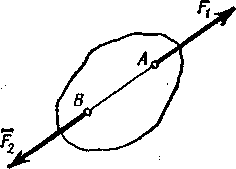 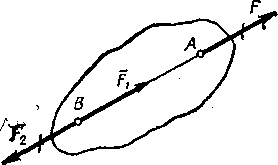 Рисунок 1.2 к аксиоме 1 Рисунок 1.3. Аксиома 2 Следствие: действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела. Аксиома 3. Закон параллелограмма сил: две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах (рис. 1.4). 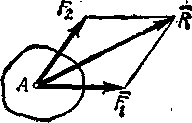 Рисунок 1.4. Аксиома 3 Вектор  равный диагонали параллелограмма, построенного на векторах равный диагонали параллелограмма, построенного на векторах  и и  (рис. 1.4), называется геометрической суммой векторов и : (рис. 1.4), называется геометрической суммой векторов и : . (1) . (1)По модулю равнодействующая равна  (2) (2)Аксиома 4.Закон равенства действия и противодействия: при всяком действии одного материального тела на другое имеет место такое же численно, но противоположное по направлению противодействие. (рис. 1.5).  Рисунок 1.5. Аксиома 4 Аксиома 5. Принцип отвердевания. Равновесие деформируемого тела не нарушится, если жестко связать его точки и считать тело абсолютно твердым. Основные виды связей и их реакции. Тело, которое может совершать из данного положения любые перемещения в пространстве, (т.е. если его перемещения ничем не ограничены) называется свободным. Тело, перемещения которого ограничены другими телами, называется несвободным, Все то, что ограничивает перемещения данного тела в пространстве (тела, ограничивающие перемещения данного тела), называют связью. Итак, несвободным называется такое твердое тело, на которое наложены связи, ограничивающие его движение в некоторых направлениях. Так, для лампы, подвешенной на шнуре, связью является шпур; для книги, лежащей па с голе, связью является стол; для лестницы, приставленной к стене, связями являются пол и стена. Для шара, катящегося по бильярдному столу, связью является поверхность стола и его борта. Сила, характеризующая действие связи на твердое тело, называется реакцией связи. Если считать силу, с которой твердое тело действует на связь, действием, то реакция связи является противодействием. При этом сила — действие приложена к связи, а реакция связи приложена к твердому телу. Все силы, действующие на твердое тело, можно разделить па две группы: силы активные1 и реакции связей. При этом активными следует считать все силы, не являющиеся реакциями связей. Таким образом, какая-либо неизвестная сила, не являющаяся реакцией связи, также является активной силой. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Аксиома связи. Аксиома 6. Закон освобождаемости от связи. Несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив действие связей соответствующими реакциями связей. Рассмотрим, как направлены реакции некоторых основных видов связей. 1. Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Реакция соприкасающихся тел в точке их касания и приложена в этой точке (рис. 2.1; 2.3).   Реакция идеально гладкой поверхности направлена по общей нормали к соприкасающимся поверхностям (рис. 2.4, а).  Рисунок 2.4. Реакция идеально гладкой поверхности 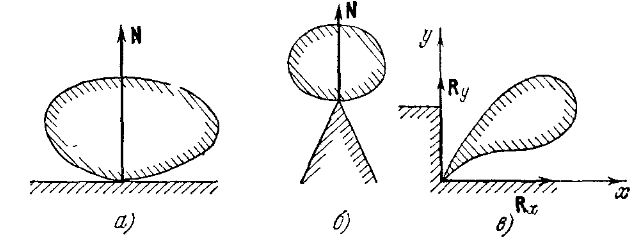  Если твердое тело имеет гладкую поверхность и опирается на острие (рис. 2.4, б), то реакция направлена по нормали к поверхности самого тела. Если твердое тело упирается острием в угол (рис. 2.4, в), то связь препятствует перемещению острия как по горизонтали, так и по вертикали. Соответственно реакция R угла может быть представлена двумя составляющими — горизонтальной Rх и вертикальной Ry, величины и направления которых в конечном счете определяются заданными силами. Если твердое тело имеет гладкую поверхность и опирается на острие (рис. 2.4, б), то реакция направлена по нормали к поверхности самого тела. Если твердое тело упирается острием в угол (рис. 2.4, в), то связь препятствует перемещению острия как по горизонтали, так и по вертикали. Соответственно реакция R угла может быть представлена двумя составляющими — горизонтальной Rх и вертикальной Ry, величины и направления которых в конечном счете определяются заданными силами.2. Нить. Реакция Т натянутой нити направлена вдоль нити к точке ее подвеса (рис. 2.2; 2.5).   3. Цилиндрический шарнир (рис. 2.6). Для силы R в этом случае наперед неизвестны ни ее модуль R, ни направление (угол ). 3. Цилиндрический шарнир (рис. 2.6). Для силы R в этом случае наперед неизвестны ни ее модуль R, ни направление (угол ).3.1. Цилиндрическая шарнирно-неподвижная опора (рис. 2.7, а). Реакция такой опоры проходит через ее ось, причем направление реакции может быть любым (в плоскости, перпендикулярной оси опоры).  4. Цилиндрическая шарнирно-подвижная опора (рис. 2.7, б) препятствует перемещению закрепленной точки тела по перпендикуляру к плоскости I — I; соответственно реакция такой опоры также имеет направление этого перпендикуляра. 4. Цилиндрическая шарнирно-подвижная опора (рис. 2.7, б) препятствует перемещению закрепленной точки тела по перпендикуляру к плоскости I — I; соответственно реакция такой опоры также имеет направление этого перпендикуляра. 4. Сферический шарнир и подпятник. Тела, соединенные сферическим шарниром, могут как угодно поворачиваться одно относительно другого вокруг центра шарнира. Для реакции наперед неизвестны ни ее модуль R, ни углы с осями Аху.Произвольное направление в пространстве может иметь и реакция R подпятника, изображенного на рис. 2.8,б.  5. Невесомый стержень (рис. 2.9). Невесомым называют стержень, весом которого по сравнению с воспринимаемой им нагрузкой можно пренебречь (рис. 2.9, а). Тогда на стержень будут действовать только две силы, приложенные в точках А и В; при равновесии эти силы должны быть направлены вдоль вдоль АВ (рис. 2.9, б). 5. Невесомый стержень (рис. 2.9). Невесомым называют стержень, весом которого по сравнению с воспринимаемой им нагрузкой можно пренебречь (рис. 2.9, а). Тогда на стержень будут действовать только две силы, приложенные в точках А и В; при равновесии эти силы должны быть направлены вдоль вдоль АВ (рис. 2.9, б). 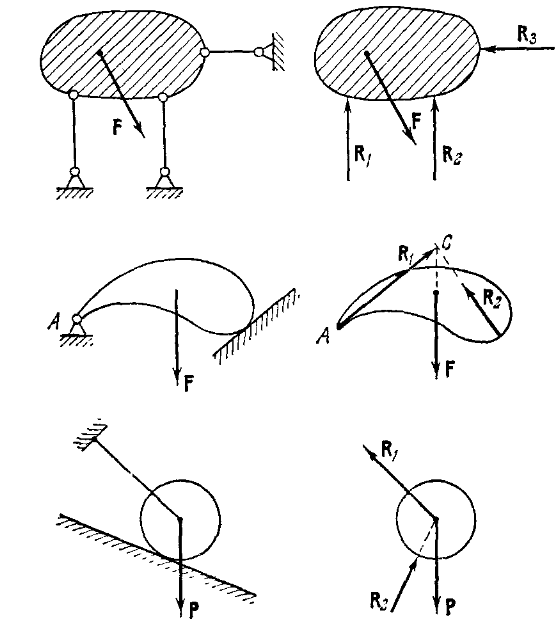 Рисунок 2.10. Наложение одновременно несколько связей различного типа. На одно и то же тело может быть наложено одновременно несколько связей, возможно, различного типа. Три примера такого рода представлены на рис. 1.10, а. На рис. 1.10, б изображены соответствующие системы сил; здесь, в соответствии с принципом освобождаемости, связи отброшены и заменены реакциями. Реакции стержней направлены вдоль стержней (верхняя схема); при этом предполагается, что стержни невесомы и соединены с телом и опорами с помощью шарниров. Реакции идеально гладких опорных поверхностей направлены по нормали к этим поверхностям (две нижние схемы). Кроме того, реакция цилиндрического шарнира в точке А (средняя схема) должна на основании теоремы о трех непараллельных силах проходить через точку пересечения линий действия сил F и R2 —точку С. Реакция R1 идеально гибкой нерастяжимой и направлена вдоль нити (нижняя схема). 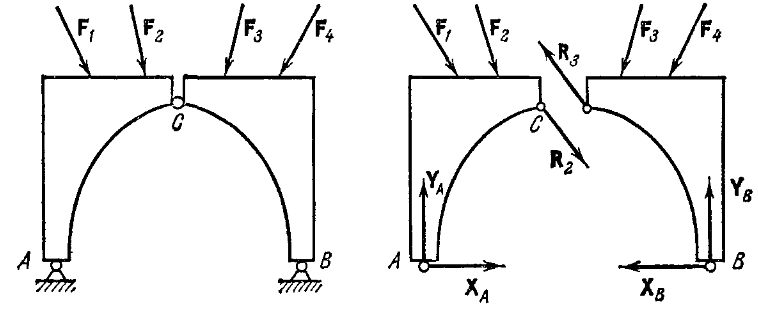 Рисунок 2.11. Два тела соединены шарниром С. В механических системах, образованных путем сочленения нескольких твердых тел, наряду с внешними связями (опорами) имеются внутренние связи. В этих случаях иногда мысленно расчленяют систему и заменяют отброшенные не только внешние, но и внутренние связи соответствующими реакциями. Один пример такого рода, в котором два тела соединены шарниром С, представлен на рис. 2.11. Отметим, что силы R2 и R3 равны друг другу по модулю, но противоположно направлены (по аксиоме 4). В заключении этого параграфа отметим, что силы взаимодействия между отдельными точками данного тела называются внутренними, а силы, действующие на данное тело и вызванные другими телами, называются внешними. Из этого следует, что реакции связей являются для данного тела внешними силами. |