ОТВЕТЫ НА ЭКЗАМЕН ПО САУ 5 КУРС. 1. Функциональная схема пилотажного комплекса ла
 Скачать 6.73 Mb. Скачать 6.73 Mb.
|

|
25. Законы управления ГТД на форсажных режимах. Для форсированного повышения тяги силовой установки используют дожигание топлива в форсажной камере. Режим турбореактивного двигателя с форсажной камерой (ТРДФ) определяется тремя параметрами рабочего процесса. Это могут быть  (или (или  ), ),  (или (или  ), ),  (или (или  ). Для регулирования по трем параметрам имеются три регулирующих фактора ). Для регулирования по трем параметрам имеются три регулирующих фактора  , ,  , ,  . .Изменение режима работы форсажной камеры влияет на режим турбины, изменяя  . Задача регулирования форсированного режима сводится к обеспечению таких величин расхода форсажного топлива и площади сопла, при которых с изменением условий полета и степени форсирования величина . Задача регулирования форсированного режима сводится к обеспечению таких величин расхода форсажного топлива и площади сопла, при которых с изменением условий полета и степени форсирования величина  сохраняется неизменной или изменяется по определенному закону в зависимости от требуемого изменения сохраняется неизменной или изменяется по определенному закону в зависимости от требуемого изменения  . .Регулирование форсированного режима по программе  получило наибольшее распространение, так как при закритических перепадах давления в реактивном сопле изменение внешних условий не влияет на величину . получило наибольшее распространение, так как при закритических перепадах давления в реактивном сопле изменение внешних условий не влияет на величину .У ТРДФ, предназначенных для работы в широком диапазоне изменения  , может быть предусмотрена коррекция программы, заключающаяся в переходе на другое значение , может быть предусмотрена коррекция программы, заключающаяся в переходе на другое значение  при достижении определенного значения при достижении определенного значения  в соответствии с выбранной линией рабочих режимов. Такая коррекция в одном случае позволяет поднять в соответствии с выбранной линией рабочих режимов. Такая коррекция в одном случае позволяет поднять  и приблизить ее к расчетному значению, в другом – предохраняет турбину от перегрева при увеличении работы сжатия. и приблизить ее к расчетному значению, в другом – предохраняет турбину от перегрева при увеличении работы сжатия.Регулирование форсированного режима по программе  дает возможность увеличивать температуру газа перед турбиной ( дает возможность увеличивать температуру газа перед турбиной ( ). ).Регулирование форсированного режима по программе  при данной степени форсирования обеспечивает получение наибольшей тяги двигателя. Задача использования этой программы сводится к определению и реализации зависимости при данной степени форсирования обеспечивает получение наибольшей тяги двигателя. Задача использования этой программы сводится к определению и реализации зависимости  при известном законе изменения . Эту зависимость удается упростить: после перехода от давления при известном законе изменения . Эту зависимость удается упростить: после перехода от давления  к давлению к давлению  она принимает вид она принимает вид  . .Стремление повысить степень форсирования ТРДФ приводит к тому, что суммарный коэффициент избытка воздуха  становится очень низким. ТРДФ с большой степенью форсирования работают при становится очень низким. ТРДФ с большой степенью форсирования работают при  =1,1…1,2, что создает существенные трудности в управлении форсированным режимом. =1,1…1,2, что создает существенные трудности в управлении форсированным режимом.Регулирование форсированного режима по программе  можно выполнить двумя способами. По первому из них задается площадь сопла, а регулятор можно выполнить двумя способами. По первому из них задается площадь сопла, а регулятор  воздействует на подачу форсажного топлива ( воздействует на подачу форсажного топлива ( – регулирующий фактор). По второму способу задается расход форсажного топлива – регулирующий фактор). По второму способу задается расход форсажного топлива  , а регулятор воздействует на площадь сопла ( , а регулятор воздействует на площадь сопла ( – регулирующий фактор). Второму способу следует отдать предпочтение, особенно при больших степенях форсирования. – регулирующий фактор). Второму способу следует отдать предпочтение, особенно при больших степенях форсирования.На рис. 5.13 показана структурная схема одной из возможных САУ одновального ТРДФ.  Рис. 5.13. Структурная схема САУ одновального ТРДФ В системе расход топлива в основную камеру сгорания задается в зависимости от частоты вращения, положение створок реактивного сопла – в зависимости от  с коррекцией астатическим ограничителем температуры газов; расход форсажного топлива пропорционален с коррекцией астатическим ограничителем температуры газов; расход форсажного топлива пропорционален  . .Анализ запасов устойчивости этой системы в сравнении с запасами устойчивости систем, в которых сопло управляется по одному из законов  , ,  , ,  , показывает, что критический коэффициент усиления в канале регулирования сопла у нее максимален. Интегральная оценка качества управления, оцениваемого по критерию , показывает, что критический коэффициент усиления в канале регулирования сопла у нее максимален. Интегральная оценка качества управления, оцениваемого по критерию минимальна для случаев управления  , ,  . .При регулировании двухвальных ТРДФ в форсажном контуре могут использоваться те же структуры, что и для одновальных. Однако из-за изменения скольжения роторов процессы при отработке возмущений, связанных с включением и выключением форсажной камеры, протекают по разному. При этом могут вступать в работу ограничители  или или  , изменяются запасы газодинамической устойчивости. , изменяются запасы газодинамической устойчивости.При построении систем регулирования ТРДФ с двухкаскадным компрессором можно использовать следующие сочетания законов управления: 1.  – управление режимом, – управление режимом,  или или  ; ;2.  – управление режимом, – управление режимом,  или или  ; ;3.  – управление режимом, – управление режимом,  или или  ; ;4.  – управление режимом, – управление режимом,  или или  . .27. Основные принципы управления ГТД на режимах приемистости. Процессы приемистости и дросселирования – это перевод двигателя с режима малого газа на больший режим и с большего на меньший соответственно за определенное время. При этом необходимо обеспечить требуемое изменение тяги без нарушения газодинамической устойчивости, перегрева двигателя, перенапряжения деталей, погасания пламени и т.д. В зависимости от конструктивной схемы двигателя процессы приемистости и дросселирования происходят по-разному. На рис. 5.12 показан процесс разгона одновального ТРД без изменения геометрии. Видно, что до значения  ограничение скорости на разгоне происходит из-за близости к границе газодинамической устойчивости, при ограничение скорости на разгоне происходит из-за близости к границе газодинамической устойчивости, при  вступает в работу ограничитель температуры газов. Реализация кривой в приведенных координатах позволяет обеспечить качество процессов приемистости на всех условиях полета. вступает в работу ограничитель температуры газов. Реализация кривой в приведенных координатах позволяет обеспечить качество процессов приемистости на всех условиях полета. Динамическая характеристика ГТД Если сопло в процессе приемистости держать полностью открытым, а в конце приемистости быстро закрыть, то будут обеспечены малое время разгона за счет большого перепада давлений на турбине и резкий прирост тяги при быстром прикрывании сопла. При дросселировании первоначально запасы газодинамической устойчивости увеличиваются, затем уменьшаются, что особенно неблагоприятно на режимах «встречной приемистости» (т.е. когда после дросселирования сразу следует разгон). Для увеличения запасов газодинамической устойчивости каскада низкого давления можно использовать перепуск воздуха между каскадами компрессора. Обеспечение требуемых характеристик разгона можно получить, осуществляя дозирование топлива по одному из следующих законов:  ; ;  ; ;   ; ;  ; ;  и др. и др.29. Регулирование запуска ГТД ? Запуск авиационного двигателя есть переходный режим от состояния покоя или режима авторотации до режима малого газа, на котором возможна длительная устойчивая работа двигателя и с которого возможен надежный выход на любой рабочий режим. Важнейшей задачей автоматики при запуске является обеспечение требуемого качества смеси воздуха и топлива, чтобы не допустить ее переобогащения или обеднения. В первом случае возможен перегрев лопаток турбины, во втором – зависание, т.е. медленное развитие процесса увеличения частоты вращения или даже погасание пламени. Для предотвращения этих явлений выбирают соответствующий закон подачи топлива в камеру сгорания с учетом внешних условий. Подача топлива на запуске может осуществляться в зависимости от разности  либо гидрозамедлителем, либо клапанами, подключающими в зависимости от частоты вращения дополнительное топливо. либо гидрозамедлителем, либо клапанами, подключающими в зависимости от частоты вращения дополнительное топливо.30. Принципы построения и основные характеристики воздухозаборников. Воздухозаборники можно сравнить с легкими человека. Так же как кислород в легких служит для жизнеобеспечения всех живых материй в организме человека, так и воздух из воздухозаборников служит для жизнеобеспечения «сердца» самолета - его силовой установки (двигателей).Воздушно-реактивные двигатели работают на горючем (сегодня это преимущественно сжиженный газ). Для того, чтобы произошло внутреннее возгорание газа, его необходимо окислить (хотя больше сюда подойдет слово «испарить»). Окислителем в данном случае является кислород, количество которого в воздухе составляет 23%. Получается, что пригодным для работы двигателя воздухом является только четверть, но куда девается остальной воздух? Остальные 77% воздуха используются для охлаждения камеры горения, а также сопла, из которого выходят в атмосферу раскаленные продукты горения. Специалисты называют этот воздух вторичным или вентиляционным. Он помогает защитить стенки камеры и турбины от повреждений: трещин, обугливания и, в самом крайнем случае, плавления.Воздухозаборник, затем специальный компрессор, служащий для сжатия воздуха, а также камера сгорания представляют собой единую систему в любом современном реактивном двигателе. Взаимодействуют они следующим образом: сначала воздух поступает в воздухозаборник, где сжимается и нагревается до температуры от 100 до 200 ºС (такая температура обеспечивает достаточное испарение топлива и практически полное его сгорание), далее воздух попадает в компрессор, где проходит еще одну стадию сжатия и нагревания, и наконец, в уже готовом виде оказывается в камере сгорания вместе с газом, где мощная электрическая искра воспламеняет смесь из кислорода и газа. Скорость, с которой воздух поступает в камеру сгорания, составляет 120 - 170 м/сек. Этот поток в 3 - 5 раз сильнее порыва ветра при самом мощном урагане, способном разрушать здания.Cовременные воздухозаборники состоят из трех слоев: двух металлических пластов и, расположенного между ними, стеклотканного сотового заполнителя. Вероятнее всего, выбор авиаконструкторов пал на такую конструкцию по следующим причинам: во-первых, использование сотового заполнителя обеспечивает большую прочность конструкции, хотя на первый взгляд может показаться, что это отнюдь не так; во-вторых, сотовый заполнитель является хорошим звуко-и теплоизолятором. В углублении на первом плане устанавливается вентилятор, который равномерно распределяет поток воздуха. Если форма воздухозаборников выбирается для каждого самолета отдельно на основе летно-технических характеристик исключительно данного самолета, то при их расположении необходимо отталкиваться от строгих правил проектирования самолетов. Различают три вида воздухозаборников по их расположению на самолете: лобовые, боковые и подкрыльные (или подфюзеляжные). Правда, фактически сегодня осталось только два вида. Лобовые воздухозаборники стали достоянием истории. Вспомните немного странные формы носа хотя бы на первом сверхзвуковом самолете F-86 « Sabre», Су-17 или МиГ-21. Главным преимуществом лобовых воздухозаборников авиаконструкторы считали равномерную скорость потока воздуха, поскольку в отличие от всех остальных видов воздухозаборников они первыми встречаются с потоком воздуха. В остальных случаях первыми с потоком воздуха встречаются или носовая часть фюзеляжа или крылья. Наиболее распространенным видом воздухозаборников в современной авиации являются боковые. Теперь баланс достигнут, и несмотря на то, что, из-за боковых воздухозаборников самолеты стали менее обтекаемыми по форме, скорость их продолжает расти. 31. Основные способы регулирования и структурные схемы САУ воздухозаборников Система автоматического управления всережимным воздухозаборником по величине степени сжатия (СРВМУ-2АМ, УВД-2М, УВД-58М, ЭСУВ-1В и др.) состоит из устройства формирования сигнала о величине степени сжатия компрессора (датчики ДСС, ДССБ, 2ДССА, 2ДССБ и др.) и следящей системы, обеспечивающей соответствие положений входных устройств величинам степени сжатия. 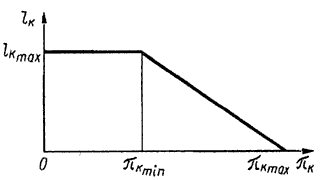 Рис.1 Программа управления входным устройством по степени сжатия компрессора Система автоматического управления воздухозаборником по величине приведенной частоты вращения вала (АРВ-26А, АРВ-29Д, АРВ-29И, АРВ-40, СУЗ-9, СУЗ-10, СУЗ-11). Датчиком приведенной частоты вращения вала авиадвигателя ДП4 служит электрическое счетно-решающее устройство, вычисляющее частоту вращения по формуле где n—частота вращения вала двигателя; Т* = Т (1 +0,2M2)—температура заторможенного потока воздуха перед компрессором; Т —температура наружного воздуха. 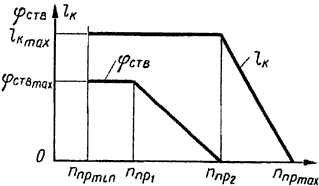 Рис.2 Программа управления входным устройством по приведенной частоте вращения двигателя Особенностью схемы является то, что одна и та же следящая система используется для плавного автоматического управления положения конуса, так и положением створок перепуска воздухозаборника. 32. Синтез структуры и параметров многосвязной САУ ГТД Необходимость одновременного регулирования нескольких взаимосвязанных физических величин в ГТД приводит к сложной с несколькими контурами регулирования многосвязной системе регулирования. Известные методы синтеза одномерных систем с использованием логарифмических частотных характеристик, корневых годографов, интегральных оценок не могут быть прямо использованы для синтеза многосвязных систем из-за наличия многих взаимосвязанных контуров регулирования. Существуют различные методы проектирования многосвязных САУ (МСАУ): из условий полной или частичной автономности; по заданному распределению полюсов замкнутой системы; используя модальное управление; в виде задачи приближения и т.д. Каждый из них имеет свои достоинства и недостатки. Синтез МСАУ в общем виде можно решить в виде задачи приближения искомых характеристик к оптимальным, определенным по техническим требованиям. Подобный метод приводит к простым аналитическим зависимостям для определения значений параметров регуляторов. Структурная схема многосвязной системы автоматического управления представлена на рис. 5.15.  Рис. 5.15. Структурная схема МСАУ Уравнения движения системы запишем в следующем виде: – уравнение объекта регулирования  , (5.26) , (5.26)– уравнение регулирующих органов  , (5.27) , (5.27)– уравнение замыкания  . (5.28) . (5.28)Здесь  , ,  , ,  и и  – –  -мерные векторы-столбцы изображений регулируемых величин, задающих воздействий, отклонений регулируемых величин и регулирующих воздействий соответственно; -мерные векторы-столбцы изображений регулируемых величин, задающих воздействий, отклонений регулируемых величин и регулирующих воздействий соответственно;  – передаточная матрица объекта регулирования; – передаточная матрица объекта регулирования;  – передаточная матрица регуляторов. – передаточная матрица регуляторов.Из решения системы матричных уравнений (5.26) – (5.28) получаем выражения для матриц выходной координаты и передаточной матрицы замкнутой системы регулирования  , , , (5.29) , (5.29)где  – единичная – единичная  матрица. матрица.Матрица  находится из условия равенства матрицы передаточных функций замкнутой МСАУ, коэффициенты элементов которой выражены через известные параметры объекта и неизвестные параметры регуляторов, и матрицы требуемых передаточных функций находится из условия равенства матрицы передаточных функций замкнутой МСАУ, коэффициенты элементов которой выражены через известные параметры объекта и неизвестные параметры регуляторов, и матрицы требуемых передаточных функций  , в структуре и коэффициентах у которой содержатся требования к качеству переходных процессов: , в структуре и коэффициентах у которой содержатся требования к качеству переходных процессов: , , . (5.30) . (5.30)Из выражения (5.30) видно, что регулятор в общем случае может выполнять две функции: скомпенсировать свойства объекта  и обеспечить необходимый вид переходных процессов в соответствии с и обеспечить необходимый вид переходных процессов в соответствии с   . .Элементы матрицы требуемых передаточных функций  выбираются исходя из требований к качеству переходных процессов различных параметров объекта. Если ставится задача синтеза многосвязной системы регулирования при условии полной автономности контуров регулирования, то в матрице выбираются исходя из требований к качеству переходных процессов различных параметров объекта. Если ставится задача синтеза многосвязной системы регулирования при условии полной автономности контуров регулирования, то в матрице  следует принять следует принять  при при  . . |