ОТВЕТЫ НА ЭКЗАМЕН ПО САУ 5 КУРС. 1. Функциональная схема пилотажного комплекса ла
 Скачать 6.73 Mb. Скачать 6.73 Mb.
|

|
42. Характеристики возмущенной атмосферы. Ветровое возмущение. Существуют различные виды воздушных потоков: постоянные ветры, восходящие и нисходящие потоки, порывы ветра, завихрения и т.д.Действие порывов ветра вызывает отклонение ЛА от заданной траектории полета, увеличивает перегрузки, действующие на ЛА, и ухудшает управляемость.Порывы ветра большой интенсивности могут быть приняты в пределе как скачки скорости ветра. Движущимся ЛА такой скачок воспринимается как импульс. В ряде случаев более важными являются не единичные порывы ветра, а случайные возмущения, состоящие из нерегулярно чередующихся единичных порывов ветра. Такие нерегулярные порывы ветра называются турбулентностью атмосферы. В простейшем случае модель турбулентной атмосферы рассматривается как стационарный случайный процесс и задается соответствующей корреляционной функцией  или спектральной плотностью или спектральной плотностью  . Имея реализацию случайного процесса, можно найти корреляционную функцию и спектральную плотность . Имея реализацию случайного процесса, можно найти корреляционную функцию и спектральную плотность  порывов ветра: порывов ветра:  , , Определим реакцию ЛА на турбулентные возмущения. Предположим, например, что Определим реакцию ЛА на турбулентные возмущения. Предположим, например, что  – спектральная плотность вертикальных порывов ветра, соответствующая скорости порывов – спектральная плотность вертикальных порывов ветра, соответствующая скорости порывов  , и , и  – частотная характеристика ЛА в продольном движении, отражающая реакцию – частотная характеристика ЛА в продольном движении, отражающая реакцию  -й координаты ЛА на ветровые порывы. Тогда спектральная плотность интенсивности реакции ЛА -й координаты ЛА на ветровые порывы. Тогда спектральная плотность интенсивности реакции ЛА  на вертикальные порывы будет на вертикальные порывы будет а дисперсия а дисперсия  реакции ЛА на порывы ветра: реакции ЛА на порывы ветра: 43. Функциональная схема автопилота. Датчики, сервопривод, механизм согласования. Автопилот является одним из важнейших элементов любой САУ. Автопилоты различаются структурными особенностями, законами управления, формой сигналов-носителей информации, числом каналов управления и др. Функциональная схема одного из каналов автопилота приведена на рис. Чувствительный элемент в сочетании с устройством для снятия сигналов образует датчик сигналов. Набор необходимых датчиков первичной информации диктуется конкретной структурой разрабатываемой САУ. Характеристиками датчиков являются передаточные функции и статические погрешности. Очевидно, что статические погрешности датчиков должны быть меньше требуемых точностей процессов управления.  Исполнительными устройствами систем управления, преобразующими командные сигналы в механические перемещения аэродинамических органов управления, являются приводы. В авиации применяют приводы гидравлического и электрического принципа действия. Привод, главной задачей которого является преобразование электрического командного сигнала в механическое перемещение, называют сервоприводом. Механизм согласования служит для автоматической подготовки автопилота к включению его силовой части. Механизм согласования представляет собой следящую систему, которая находится в замкнутом состоянии, когда автопилот не включен. 44. Законы управления автопилотов. Под законом управления автопилота понимается требуемая зависимость между изменением выходной и входных координат. При этом под выходной понимается координата, характеризующая положение исполнительного органа  , под входными – координаты, сигналы по которым вводятся в автопилот с помощью соответствующих датчиков , под входными – координаты, сигналы по которым вводятся в автопилот с помощью соответствующих датчиков  и задатчика и задатчика . Тогда для закона управления можно написать зависимость . Тогда для закона управления можно написать зависимость , где , где  – передаточные функции корректирующих устройств по регулируемым координатам; – передаточные функции корректирующих устройств по регулируемым координатам;  – передаточная функция корректирующего устройства по сигналу задатчика. В зависимости от типа применяемой в сервоприводе автопилота обратной связи различают следующие законы управления:– для автопилота с ЖОС – передаточная функция корректирующего устройства по сигналу задатчика. В зависимости от типа применяемой в сервоприводе автопилота обратной связи различают следующие законы управления:– для автопилота с ЖОС ,– для автопилота с СОС ,– для автопилота с СОС , – для автопилота с ИОС , – для автопилота с ИОС  Автопилоты по виду закона управления классифицируют на статические, в которых каждому положению исполнительного органа соответствует определенное значение регулируемого параметра, и астатические, в которых скорость исполнительного органа однозначно связана с регулируемым параметром. Автопилоты по виду закона управления классифицируют на статические, в которых каждому положению исполнительного органа соответствует определенное значение регулируемого параметра, и астатические, в которых скорость исполнительного органа однозначно связана с регулируемым параметром.46. Требования к системам автоматического управления ЛА САУ ЛА обеспечивает стабилизацию и управление угловыми движениями ЦМ ЛА. САУ полетом должны: 1) улучшать устойчивость и управляемость ЛА на всех режимах полета, как при ручном полуавтоматическом, так и автоматическом управлении, 2) обеспечивать управление угловыми движениями ЛА и движениями ЦМ, наведение на цели, 3) быть пригодными для включения в работу в любом положении ЛА и выводить ЛА в горизонтальный полет при допустимых перегрузках, 4) иметь связь СУ при посадке и взлёте, 5) для стабилизации скорости при сверхзвуковых полетах и на посадочных режимах включать канал управления скоростью с подачей сигналов на РВ и на тягу двигателей, 6) предусматривать устройства для ограничения предельных режимов по перегрузкам углам крена, угловым скоростям, 7) предусматривать коррекцию передаточных чисел по режимам полета, а при широком диапазоне изменение параметров ЛА, система управления должна быть самонастраивающейся (адаптивной), 8) иметь связь СУ строем самолетов, 9) обеспечивать выбор и поддержание оптимальных режимов полета( миним. Время, макс. Дальность, мин. Расход топлива, оптимальная траектория, автоматическое маневрирование и т.д.). 45. Принцип действия каналов крена, тангажа и рыскания автопилота. Рассмотрим статическую систему автоматического управления углом тангажа включающую контур управления угловой скоростью и контур управления углом тангажа. Передаточная функция ЛА взята в предположении постоянства скорости полета  Закон управления системы берем в виде Закон управления системы берем в виде , где , где  – заданное значение угла тангажа, – заданное значение угла тангажа,  , ,  – передаточные числа. – передаточные числа.  где где  , ,  , ,  , ,  . Рассматриваемая система обладает статической ошибкой. Чтобы определить эту ошибку в уравнении примем . Рассматриваемая система обладает статической ошибкой. Чтобы определить эту ошибку в уравнении примем  . Тогда при условии . Тогда при условии  найдем найдем . .Отсюда следует, что чем больше передаточное число  , тем меньше статическая ошибка. Однако при значительном , тем меньше статическая ошибка. Однако при значительном  система может стать неустойчивой вследствие динамических погрешностей в элементах автопилота. система может стать неустойчивой вследствие динамических погрешностей в элементах автопилота. При изодромном автопилоте система не имеет статических погрешностей по угловым координатам, поэтому такой автопилот применяется на самолетах, требующих точной стабилизации угловых координат. Рассмотрим систему управления углом тангажа, включающую изодромный автопилот. Закон управления такого автопилота имеет вид  структура системы с изодромным автопилотом аналогична структуре системы с автопилотом, имеющим скоростную обратную связь, причем выполняются следующие соотношения между передаточными числами автопилотов: структура системы с изодромным автопилотом аналогична структуре системы с автопилотом, имеющим скоростную обратную связь, причем выполняются следующие соотношения между передаточными числами автопилотов: , ,  , ,  . Из-за возможности технической реализации наибольшее распространение получили автопилоты, у которых . Из-за возможности технической реализации наибольшее распространение получили автопилоты, у которых  с, поэтому при расчете изодромного автопилота необходимо выбирать только величины двух параметров, т.е. с, поэтому при расчете изодромного автопилота необходимо выбирать только величины двух параметров, т.е.  и и  . .Рассмотрим поведение самолета по углу рыскания, управляемого автопилотом. Простейшим движением рыскания является колебание продольной оси самолета в горизонтальной плоскости по отношению к вектору скорости, описываемое уравнением:  . Уравнение статического автопилота возьмем в виде . Уравнение статического автопилота возьмем в виде ,где ,где  и и  – передаточные числа; – передаточные числа;  – заданный курсовой угол. – заданный курсовой угол.  , где , где  ; ;  ; ;  . Системе свойственна статическая ошибка, величина которой определяется из условия . Системе свойственна статическая ошибка, величина которой определяется из условия  : : . Видно, что для уменьшения статической ошибки необходимо увеличивать передаточное число по позиционному сигналу. Когда такая ошибка недопустима, вместо статического применяют астатический автопилот. Поведение самолета с астатическим автопилотом . Видно, что для уменьшения статической ошибки необходимо увеличивать передаточное число по позиционному сигналу. Когда такая ошибка недопустима, вместо статического применяют астатический автопилот. Поведение самолета с астатическим автопилотом Здесь Здесь  , ,  , ,  , ,  и и  – погрешности измерения курса и угловой скорости рыскания. Из уравнения видно, что поскольку возмущающий момент – погрешности измерения курса и угловой скорости рыскания. Из уравнения видно, что поскольку возмущающий момент  стоит под знаком дифференцирования, то статическая погрешность от этого момента будет отсутствовать. Вместе с тем видно, что погрешности в измерении курса стоит под знаком дифференцирования, то статическая погрешность от этого момента будет отсутствовать. Вместе с тем видно, что погрешности в измерении курса  и угловой скорости рыскания и угловой скорости рыскания  являются возмущающими факторами и целиком переходят в соответствующую погрешность стабилизации курса. Таким образом, автопилот не может стабилизировать курсовой угол (угол тангажа или крена) с большей точностью, чем точность измерения этого угла и его производных. являются возмущающими факторами и целиком переходят в соответствующую погрешность стабилизации курса. Таким образом, автопилот не может стабилизировать курсовой угол (угол тангажа или крена) с большей точностью, чем точность измерения этого угла и его производных.Для управления углом крена используется специальный канал автопилота, называемый каналом крена. Законы управления канала крена обычно имеют ту же структуру, что и законы управления каналов тангажа и рыскания. Для выбора передаточных чисел канала крена необходимо исследовать динамику переходного процесса в системе, включающей самолет и канал крена. Уравнение движения самолета по углу крена возьмем в виде  . .поведение самолета с автоматом крена при двух законах управления: статическим  ;астатическим ;астатическим  . .Решая уравнения и совместно с уравнением , получим: для статической системы  ,где ,где  , ,  .для астатической системы .для астатической системы ,где ,где  , ,  , ,  . .47. Системы управления угловой скоростью ЛА. Расчет передаточных чисел автопилота. В системах автоматического управления полетом имеются контуры управления угловыми скоростями ЛА, служащие для формирования демпфирующих моментов и, следовательно, для улучшения качества переходного процесса. Для этих же целей применяются самостоятельные системы управления угловыми скоростями, получившие название демпферов. закон управления  де де  – передаточное число, – передаточное число,  – заданная угловая скорость тангажа. Передаточная функция ЛА по угловой скорости – заданная угловая скорость тангажа. Передаточная функция ЛА по угловой скорости где  и и  – соответственно собственная частота и коэффициент затухания ЛА. – соответственно собственная частота и коэффициент затухания ЛА.Для выбора передаточного числа  заметим, что наилучшее качество процесса в колебательном звене получается при заметим, что наилучшее качество процесса в колебательном звене получается при  . Исключая из уравнений частоту . Исключая из уравнений частоту  , получим выражение для , получим выражение для  . . параметры передаточной функции сервопривода определяются выражениями: параметры передаточной функции сервопривода определяются выражениями: , ,  , ,  . Передаточная функция системы будет . Передаточная функция системы будет  В пределе, при достаточно большой частоте В пределе, при достаточно большой частоте  , динамическими погрешностями можно пренебречь и тогда поведение системы управления угловой скоростью крена будет описываться передаточной функцией типа инерционного звена, для которого увеличение передаточного числа , динамическими погрешностями можно пренебречь и тогда поведение системы управления угловой скоростью крена будет описываться передаточной функцией типа инерционного звена, для которого увеличение передаточного числа  приводит к сокращению времени переходного процесса. приводит к сокращению времени переходного процесса.48. Системы управления углом тангажа. Расчет передаточных чисел автопилота.  Передаточная функция ЛА Закон управления системы берем в виде  , где , где  – заданное значение угла тангажа, – заданное значение угла тангажа, ,–передаточные числа ,–передаточные числа где где  , ,  , ,  , ,  . Будем осуществлять выбор передаточных чисел . Будем осуществлять выбор передаточных чисел  и и  в два этапа. Сначала выберем значение в два этапа. Сначала выберем значение  из условия заданного переходного процесса по угловой скорости тангажа во внутреннем контуре САУ. При коэффициенте затухания из условия заданного переходного процесса по угловой скорости тангажа во внутреннем контуре САУ. При коэффициенте затухания  значение передаточного числа значение передаточного числа  определяется выражением. Размерные передаточные числа: определяется выражением. Размерные передаточные числа: , ,  , ,  . структура системы с изодромным автопилотом аналогична структуре системы с автопилотом, имеющим скоростную обратную связь, причем выполняются следующие соотношения между передаточными числами автопилотов: . структура системы с изодромным автопилотом аналогична структуре системы с автопилотом, имеющим скоростную обратную связь, причем выполняются следующие соотношения между передаточными числами автопилотов:  , ,  , ,  . .50 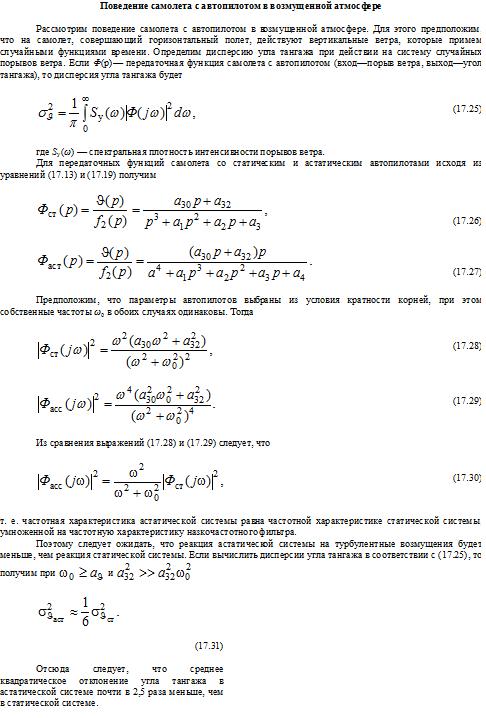 51 САУ высотой полета. Кунтуры угловой стабил. Лав продольной плоскости по углу тангажа. Анализ математической модели ЛА в продольной плоскости показывает что наиб.корректи.измненение высоты полета Н,достигается за счет измнения угла тангажа Для стабилизации высоты полета дополноительно тангажа Дельта Vзадю должен зависеть от ошибки выдержания зад. Высоты. Дельта Vзад = -Кн(Н-Нз) Соотв. Законов руля высоты. 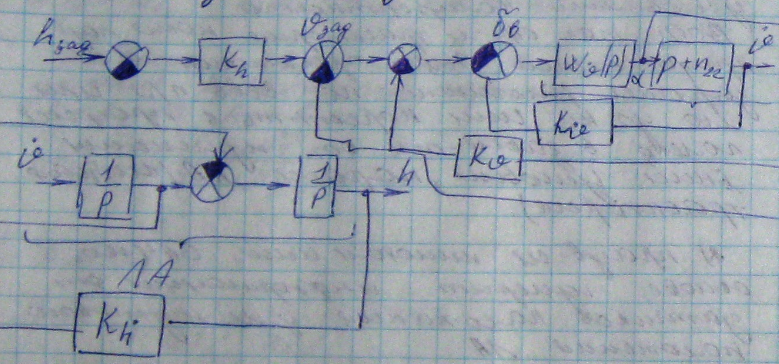 Система статическая  САУ высотой полета внешне по отклонении. К САУ угла движения.  Ошибка стабилизации дельта hнеравен Нулю. По критерию гурвица.  Сау высотой полета. Сау высотой полета.52 Изменение скорости существенно влияет на процесс стабилизации важнейших парамертов полет:угла тангажа, высоты, устойчивости ск-ть полета ЛА в горизон. Полете определяется из следующего уравнения. M*dV/Dt=P *cosАЛьфа-Х M –масса самолета. Альфа – угол атаки. Х- сила лобового сопротивления Р- сила тяги. P=P(V), X=X(V) M*dV/dt=P(v)cosАЛьфа-X(V) При установившемся режиме когда V=const, dV/dt=0 ЛА на определенных режимах полета может быть неустойчивым объектом. Управлять скоростью полета можно 2-мя путями 1) непосредственное воздействие на ягу двигатетлей. 2) косвенным путем воздействуя на руль высота, тем самым вызывая изменение угла тангажа, а следовательно лобовое споротивления, что приводит к изменения скорости. |