ОТВЕТЫ НА ЭКЗАМЕН ПО САУ 5 КУРС. 1. Функциональная схема пилотажного комплекса ла
 Скачать 6.73 Mb. Скачать 6.73 Mb.
|

  1. Функциональная схема пилотажного комплекса ЛА. 1. Функциональная схема пилотажного комплекса ЛА.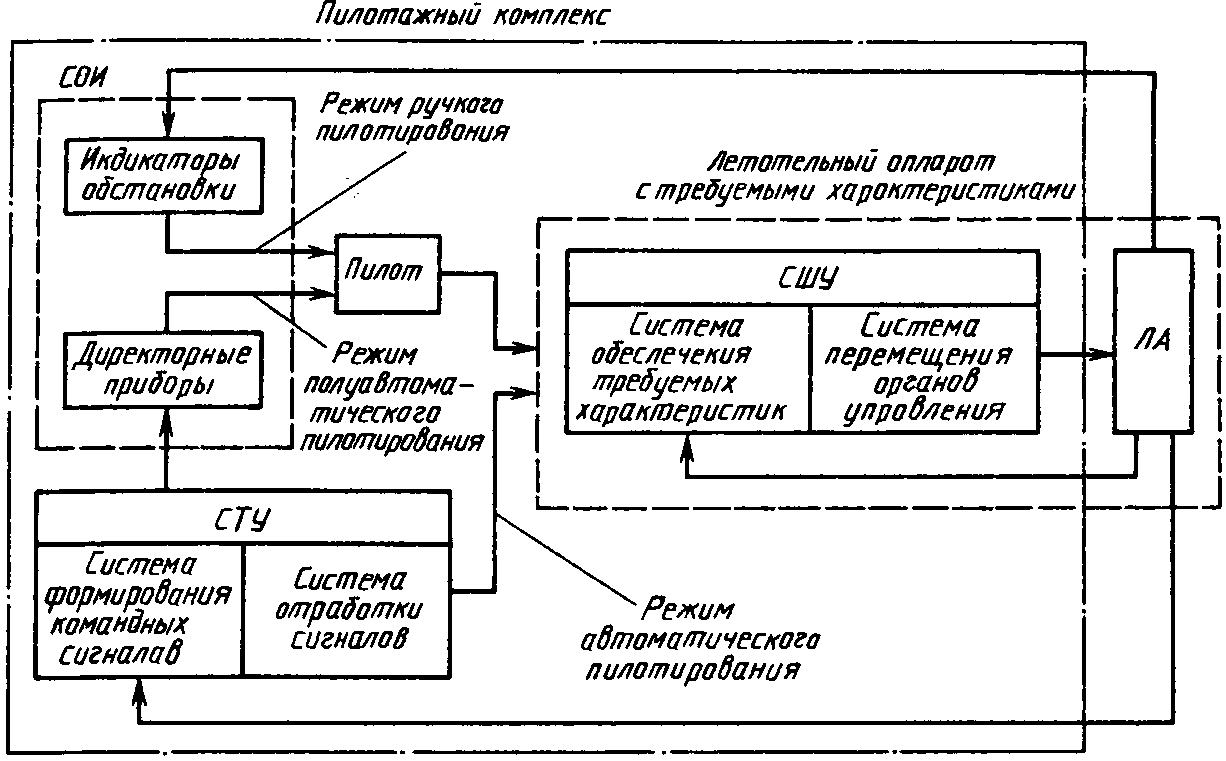 Пилотажный комплекс (ПК)—это комплекс оборудования, осуществляющий стабилизацию центра масс летательного аппарата на заданной опорной траектории и управление его поворотом вокруг центра масс с обеспечением требуемых пилотажных характеристик и безопасности полета при автоматическом, полуавтоматическом и ручном пилотировании. В ПК входят три основных функциональных системы: система штурвального управления (СШУ), система траекторного управления (СТУ) и система отображения информации (СОИ). Система штурвального управления (СШУ), состоящая из двух частей (системы перемещения органов управления и системы улучшения пилотажных характеристик), предназначена для обеспечения требуемых пилотажных характеристик (демпфирования, устойчивости и управляемости) и предотвращения возможности выхода самолета на опасные режимы при автоматическом, полуавтоматическом и ручном пилотировании. Аппаратурный состав и структура СШУ определяются аэродинамическими и геометрическими особенностями конкретного летательного аппарата. Система штурвального управления должна работать при каждом из трех возможных способов пилотирования. Она органически связана с самолетом. Если пилотажные характеристики самого самолета удовлетворяют требованиям, то необходимости в специальной подсистеме улучшения пилотажных характеристик не возникает. Но, с другой стороны, для самолетов, пилотирование которых невозможно без автоматических устройств, указанная подсистема должна быть спроектирована и установлена на самолете в первую очередь, чтобы обеспечить нормальные испытательные полеты. Система траекторного управления состоит из двух частей (системы формирования командных сигналов и системы отработки сигналов рассогласования) и предназначена для стабилизации центра масс летательного аппарата на заданной траектории и управления поворотом летательного аппарата вокруг центра масс. Аппаратурный состав и структура СТУ определяются совокупностью пилотажных задач. К числу таких задач относятся управление высотой и скоростью полета, а также угловым положением самолета. Динамические контуры СШУ являются внутренними по отношению к динамическим контурам СТУ. К последним относятся контуры стабилизации углового положения самолета и контуры стабилизации центра масс самолета на заданной траектории. В систему отображения информации включаются все средства индикации, устанавливаемые на рабочем месте летчика и обеспечивающие его информацией, необходимой для пилотирования самолета и выполнения полетного задания. Это — индикаторы пилотажной обстановки и директорные приборы. 2. Функциональная схема САУ СУ ЛА. 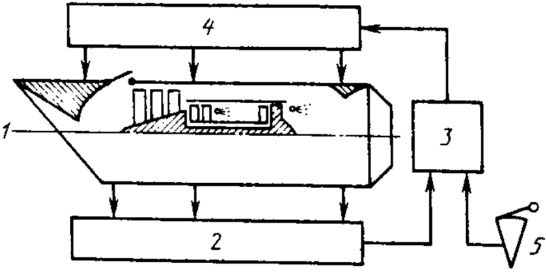 1 – объект управления, 2 – измерительные устройства, 3 – управляющая БЦВМ, 4 – исполнительные органы, 5 – органы управления режимами СУ СУ ЛА – нужный комплекс устройств, нужных для получения силы тяги. Удельные показатели СУ: удельная тяга, масса, расход топлива. Режимы работы СУ зависят от многих параметров, для поддержания заданного режима тяги нужны САУ. Особенность системы управления СУ: она является автоматической. Режимы полёта ЛА должны быть взаимосвязаны с САУ СУ для обеспечения надежности и безопасности полета. 3. Функциональная схема интегральной САУ ЛА и СУ. Системы объединенного управления элементами силовой установки, режимами работы двигателя и режимами полета самолета, целью применения которых является наиболее эффективное выполнение задачи полета, называются интегральными. Интегральные системы управления обеспечивают одновременную оптимизацию режимов работы силовой установки и полета самолета в разнообразных условиях, в том числе и существенно отличающихся от стандартных. 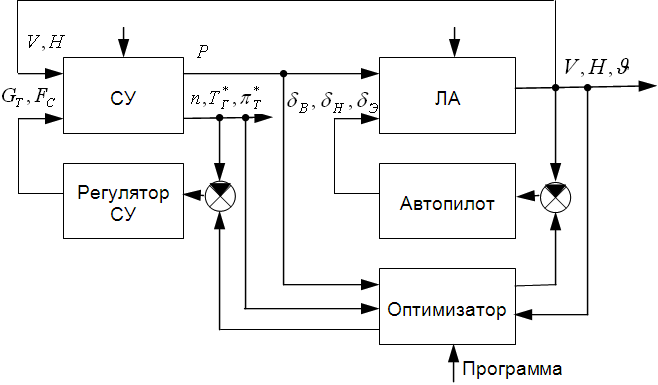 Из схемы видно, что параметры режима полета (высота и скорость полета, угловые координаты самолета) зависят от силы тяги силовой установки и от управляющих воздействий системы управления – автопилота. Сила тяги, в свою очередь, зависит от режимов полета летательного аппарата: скорости и высоты полета. Кроме того, сила тяги двигателя определяется положением регулирующих органов, задающих геометрические параметры элементов двигателя, расходом топлива в основную и форсажную камеры сгорания, определяемых работой регуляторов внутридвигательных параметров. Контур интеграции «самолет–силовая установка» должен определять задающие воздействия на регуляторы двигателя и летательного аппарата. Основными задачами, выполняемыми контуром интеграции, являются задачи регулирования скорости полета на марше, в строю, при посадке; задачи оптимального управления, обеспечивающего  или или  и др. и др.4. Классификация силовых установок летательных аппаратов. Классификация СУ ЛА. Необходимый комплекс устройств, позволяющий получить силу тяги для ЛА. В него входят входное устройство, реактивный двигатель, выходное реактивное сопло и различные системы обслуживания СУ, системы смазки, системы охлаждения, системы управления. Тип СУ определяется типом двигателя. Реактивный двигатель – тяга которого представляет собой силу реакции потоков продуктов сгорания топлива, получающих ускорение в самом двигателе и вытекающих из него в окружающую среду со скоростью большей v полета. 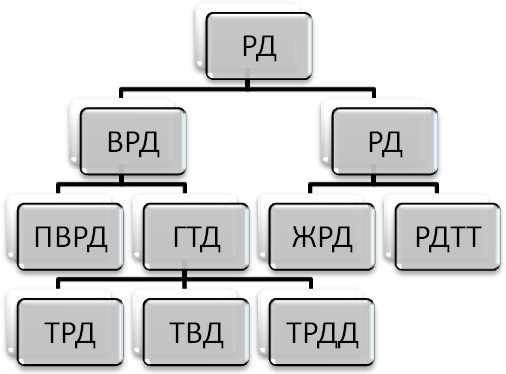 Реактивный двигатель (РД) несет запас окислителя и топлива, ВРД – использует кислород и ограничен по высоте. ПВРД – прямоточный воздушно реактивный двигатель. 5. Принципы работы ГТД. ГТД состоит из входного устройства, камеры сгорания, газовой турбины и выходного устройства. 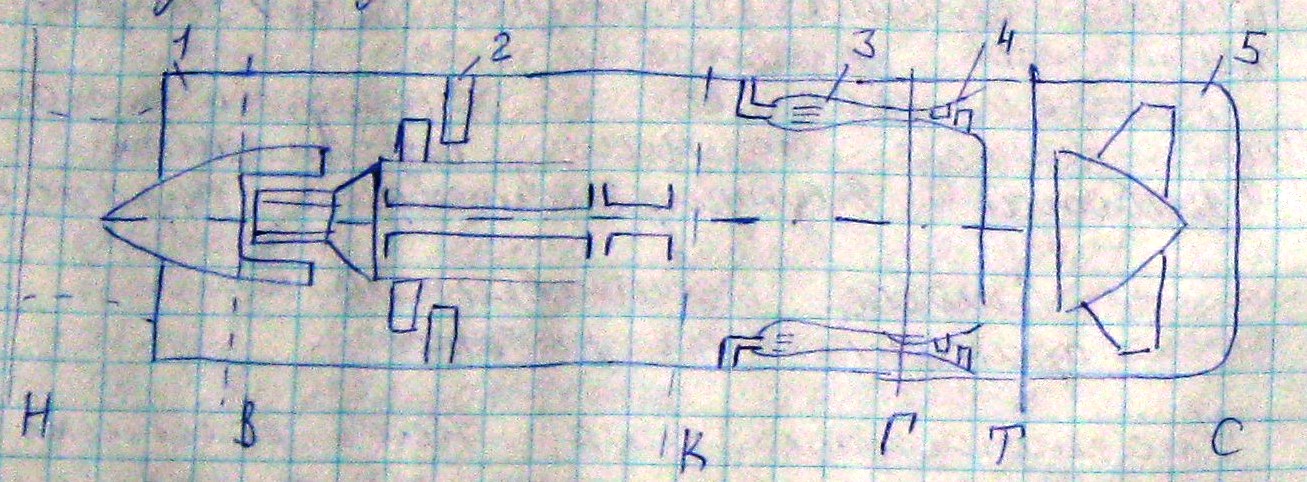 ГТД имеет:
Н - набегающий воздух. Набегающая струя воздуха тормозится в воздухозаборнике (В), где где происходит предварительное сжатие воздуха. Дальнейшее его сжатие происходит в компрессоре, из компрессора воздух поступает в камеру сгорания, куда форсунками подается топливо, и происходит сгорание топливо-воздушной смеси, сопровождающееся повышением температуры газов. В турбине происходит расширение газов, преобразование их потенциальной энергии в механическую работу на валу за счет которой приводятся компрессор и агрегаты двигателя. Окончательное расширение газов, увеличение скорости потока происходит в выходном устройстве, поскольку скорость газов на выходе больше скорости полета ЛА, в двигателе создается тяга. По назначению силовые установки делятся на основные и дополнительные. Основные, используются при полете ЛА по маршруту Дополнительные, бывают пусковые, стартовые и вспомогательные. Пусковые используются при запуске, стартовые – при разгоне ЛА, вспомогательные – для получения электрической энергии на земле и при аварии основных СУ. 6. Классификация САУ силовых установок. По назначению силовые установки делятся на основные и дополнительные. Основные, используются при полете ЛА по маршруту Дополнительные, бывают пусковые, стартовые и вспомогательные. Пусковые используются при запуске, стартовые – при разгоне ЛА, вспомогательные – для получения электрической энергии на земле и при аварии основных СУ. 7. Уравнения движения ТРД. Получим описание одновального ТРД с регулируемым соплом относительно частоты вращения ротора турбокомпрессора. Запишем уравнение моментов на валу турбокомпрессора:  , (5.2) , (5.2)где  – момент инерции ротора турбокомпрессора; – момент инерции ротора турбокомпрессора;  , ,  – крутящие моменты, развиваемые турбиной и поглощаемые компрессором. – крутящие моменты, развиваемые турбиной и поглощаемые компрессором.После линеаризации нелинейного уравнения (5.2) путем разложения в степенной ряд относительно исходного установившегося режима и перехода к относительным единицам получим дифференциальное уравнение в следующем виде:  , (5.3) , (5.3)где  , ,  , ,  – относительные величины; – относительные величины;  , ,  , ,  – базовые значения входных и выходных координат объекта управления; – базовые значения входных и выходных координат объекта управления;  ; ;  ; ;  . .Записанные в виде (5.3) уравнения динамики часто называют уравнениями «вход–выход». По виду выражения (5.3) можно охарактеризовать структуру исследуемого объекта – взаимосвязь его выходных координат, а также характер воздействия регулирующих воздействий и возмущений на выходные координаты объекта. Описание двигателя через передаточные функции можно получить из (5.3), прибегнув к преобразованию Лапласа при нулевых начальных условиях:  , (5.5) , (5.5)где  ; ;  . .Для двухвального ТРД уравнения движения роторов турбокомпрессоров высокого и низкого давлений при неизменных внешних условиях запишутся следующим образом:   (5.6) (5.6)После линеаризации и введения относительных величин приходим к следующей системе дифференциальных уравнений:  ; ; . (5.7) . (5.7)Здесь  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  Отметим, что  ; ;  ; ;  ; ;  ; ;  . .Система (5.7) может быть записана в векторно-матричной форме  , (5.8) , (5.8)где  , ,  – векторы выходных и входных координат; – векторы выходных и входных координат;  , ,  – матрицы полиномов от параметра дифференцирования – матрицы полиномов от параметра дифференцирования  . .Приравняв к нулю определитель матрицы  , получим характеристическое уравнение объекта управления , получим характеристическое уравнение объекта управления.  (5.9) (5.9)В  все коэффициенты характеристического уравнения положительны, что определяет устойчивость двухвального ТРД как объекта управления. все коэффициенты характеристического уравнения положительны, что определяет устойчивость двухвального ТРД как объекта управления.Замена  на на  в передаточной матрице ГТД позволяет перейти к динамическим характеристикам силовых установок в виде частотных характеристик, которые дают информацию о полосе пропускания объекта управления по всем каналам прохождения регулирующих и возмущающих воздействий. в передаточной матрице ГТД позволяет перейти к динамическим характеристикам силовых установок в виде частотных характеристик, которые дают информацию о полосе пропускания объекта управления по всем каналам прохождения регулирующих и возмущающих воздействий.8. Матричная форма записи уравнений ГТД. При синтезе САУ многомерными объектами полезным является исп-е матричной формы записи уравнения движения     n0, T30, GTO, Fco-базовые значения Сгруппировав в левой части уравнения регул. Переменные n, T30, в правой части регулирующие воздействия GT, FC. В результате получим : A11=τ A(p)X=B(p)Y     Уравнение в матричном виде легко решить относительно выходных элементов X=A-1(p)*B(p) или X=H(p)*Y H(p)=A-1(p)*B(p) Знаменатель определителя передаточную матрицу H(p) является характерным полиномом много мерного объекта  Исследуя характерное уравнение представление об устойчивости объекта регулирования динамичного звена 9. Свойства ТРД как объекта управления. При изменение внешних условий PH=Var, TH=Var, VH=Var режима работы двигателя изменяются значение коэффициента в уравнениях движения поэтому важно знать как изменяются пост. Времени и коэф. Расмотим ТРД неурегулированного параметром: (Tp+1)∆n=a1∆GT WnGt=∆n/∆GT=a1/Tp+1=1/T1p+p1 T1=T/a1 T-пост. Времени, P1 коэф. Самоуправления, определяющий устойчивость двигателя по числу оборотов p1=1/a1
На режимах полета малого газа двигатель неустойчив, он наиболее опасен На малых оборотах при законе подачи топлива GT=GT(n) значение коэффициента может достигать 0 или иметь «-» значения. ТРД с такими свойствами не может работать устойчиво без регуляторов. Двигать с такими свойствами не может работать устойчиво. С увеличением высоты полета свойства двигателя ухудшается. Т.к уменьшается значение коэффициента самовыравнивания p1 . Вывод- двигатель будет обладать наихудшими свойствами как объект решения при малых оборотах n, наибольше высоте и при наименьшей скорости полета. 10. Основные характеристики ГТД. Газотурбинный двигатель (ГТД) — тепловой двигатель, в котором газ сжимается и нагревается, а затем энергия сжатого и нагретого газа преобразуется в механическую работу на валу газовой турбины. В отличие от поршневого двигателя, в ГТД процессы происходят в потоке движущегося газа. Сжатый атмосферный воздух из компрессора поступает в камеру сгорания, туда же подаётся топливо, которое, сгорая, образует большое количество продуктов сгорания под высоким давлением. Затем в газовой турбине энергия газообразных продуктов сгорания преобразуется в механическую работу за счёт вращения струёй газа лопаток, часть которой расходуется на сжатие воздуха в компрессоре. Остальная часть работы передаётся на приводимый агрегат. Работа, потребляемая этим агрегатом, является полезной работой ГТД. Газотурбинные двигатели имеют самую большую удельную мощность среди ДВС, до 6 кВт/кг. В качестве топлива могут использоваться любое горючее, которое можно диспергировать: бензин, керосин, дизельное топливо, мазут, природный газ, судовое топливо, водяной газ, спирт и даже измельченный уголь. 11. Режимы работы ГТД.под способами управления режимами работы двигателя понимают характер воздействия на регулир. орган двигателя. И через них на параметры работы процесса который и определяет режимы: 1)режим полного форсажа n=nmax, T3*=T3*max, Тф*=Тф*мах, 2)режим частичного форсажа(при пилотировании) n=nmax, T3*=T3*max, Тф*<Тф*мах, 3)режим максимальный бесфорсажный n=nmax, T3*=T3*, р=рмах, 4)номинальный режим n=(0,95-0,98)nmax, T3* 5)крейсерский режим(полет по курсу) n=0,9nmax, р=(0,5-0,75)рмах , 6)режим малого газа n=(0,2-0,7)nmax, р=(0,03-0,05)рмах , 6.1)Режим земного малого газа-для рулежа самолета по аэродрому. 6.2)Режим полетного малого газа-при посадке самолета. По динамике различают режимы: 1)преходный режим с увеличением частоты наз-ся режимом разгона двигателя или режимом приемистости, при уменьшении частоты:режимом торможения(сброса) 2)режим запуска-это разгон ротора двигателя от нулевой частоты до частоты малого газа. 12. Подобные режимы ТРД. 1)режим полного форсажа n=nmax, T3*=T3*max, Тф*=Тф*мах, 2)режим частичного форсажа(при пилотировании) n=nmax, T3*=T3*max, Тф*<Тф*мах, 3)режим максимальный бесфорсажный n=nmax, T3*=T3*, р=рмах, 4)номинальный режим n=(0,95-0,98)nmax, T3* 5)крейсерский режим(полет по курсу) n=0,9nmax, р=(0,5-0,75)рмах , 6)режим малого газа n=(0,2-0,7)nmax, р=(0,03-0,05)рмах , 6.1)Режим земного малого газа-для рулежа самолета по аэродрому. 6.2)Режим полетного малого газа-при посадке самолета. По динамике различают режимы: 1)преходный режим с увеличением частоты наз-ся режимом разгона двигателя или режимом приемистости, при уменьшении частоты:режимом торможения(сброса) 2)режим запуска-это разгон ротора двигателя от нулевой частоты до частоты малого газа. 13. Допустимые области режимов работы ГТД. ГТД может работать нормально в строго определенной области режимов определяемом границами допустимых параметров: турбины ограниченный по мах частоте и t, исключения помпажа, камера сгорания Ограничения: 1)по частоте 2)по темперетуре 3)зона установленной работы компрессора ∆М=Мт-Мк=2пJ*dn/ dt  1-линия nмах 2-линия Т3*мах 3-линия неустойчивой работы компрессора 4,5-линии неустойчивого горения в камере сгорания 6-линия соответствующая р=0 7-линия статических режимов работы двигателя, равновесные режимы. 14. Динамическая характеристика ТРД. одной из форм нагляд предст. динамики ТРД кот. отображаетрезультат решения нелин. сист уравнений, опис. ТРД как обьект регулир-я называется динамическая характеристика  nпр-сетка ускорений nпр-сетка ускорений T=const-сетка изотерм P=const-сетка изобар Из свойств характеристик СУ следует что как на установившемся так и на переходных режимах работа двигателя ограничивается определенной допустимой областью режима работы. Поэтому САУ должна обеспечивать работу двигателя по заданным законам и допускать отклонения от заданных рабочих режимов которые не выходили бы из допустимой области. 15. Возможные законы управления и структурные схемы САУ ГТД. Из св-в и характеристик СУ следует что как на установившихся так и на переходных режимах работы двигателя ограничевается опред-м допустимым областью реж работы, поэтому САУ должны обеспечивать работу по заданным законам и допуск отклонениями зад раб режимов кот-е не выходили бы из допустимой области. Необходимость след устройств в кот входит сист управления из: -для вывода данных по заданному режиму работы должны быть: регулятор частоты, регулятор t газа, Ти -чтобы параметры двигателя не привышали допустимых значений в сист упр Законы управления структурной схемой САУ СУ Рассмотрим особенности построения САУ ТРД С нерегулируемым соплом:  nзад=nзад(αруд)уол отклонения рычага упр-я двигателем 16. Основные требования к САУ силовых установок. Для САУ СУ существуют жесткие требования как величина допустимых динамических погрешностей как в отношении допустимых отклонений параметров на установившихся режимах работы, так и в отношении динамических погрешностей при переходных режимах. Требования завися от конкретного применяемого СУ. САУ СУ должны обеспечить: 1) необходимую точность работы и монотонность переходных процессов в широком диапазоне изменений параметров обьекта по режимам работы и условиям полета 2)обеспечить высокий уровень надежности и безопасности полета при min весе и габаритах аппаратуры. Точность поддержки тяги +-2% на установившихся режимах. Задан точность врпщения турбокомпрессора должна поддерж-ся с погрешностью не менее 0,3%  17. Замкнутые САУ частоты вращения с астатическим гидроприводом. САУ частоты вращения по замкнутым схемам с компенсационным действием на двигатель С точки зрения реализации САУ частоты вращения могут быть построены с использованием гидромеханических и электронных систем. Замкнутая САУ частоты вращения ротора с астатическим приводом  Применение астатич. гидропривода обеспечивает стабильные свойства системы n=nзад Введение ИОС расширяет диапозон устойчивости режимов с одновременным уменьшением колебательности при приемлемой быстродействии Wиос=Tup/(Tup+1) 18. Электронные САУ частоты вращения. Электронные САУ часты вращения (аналог и цифр) дублируются упрощенной гидромеханической системой. Эти сист так же содержат гидромеханические элементы с помощью которого осуществляется изменение расхода топлива.  ЭРЧВ-электрический регулятор частоты вращения; Д-датчик; ЗР-задатчик режима; Зу-задающее устр-во; УПБ-усилительно-преобр.блок; ШИМ-широтн импульсный модулятор; МТК-магнитный клапан топлива; -преобразователь частота-напряжение; ДЧВ-датчик частоты вращения; ДК-дозирующий кран; ГП-гидропривод(сервомотор); ЦВМ-цифровая вычеслительная машина; ГМЧ-гидромехан-я часть; ТН-топливный насос, который осущ. привод от ротора ТРД 19. Корректирующие устройства в САУ частоты вращения. Структурная схема САУ частотой вращения может быть представлена в виде рис. 1.2, где РЧВ – регулятор частоты вращения.  Рис. 1.. Структурная схема САУ частотой вращения Передаточная функция объекта управления – ГТД по частоте вращения [2]  . . Для обеспечения требуемой высокой статической точности САУ частотой вращения выполняются, как правило, астатическими, при этом передаточная функция регулятора должна включать в себя интегрирующее звено, т.е.  . При этом передаточная функция разомкнутой системы . При этом передаточная функция разомкнутой системы , ,а передаточная функция замкнутой системы  . (1.5) . (1.5)Однако для таких САУ характерно то, что время регулирования и максимальный заброс управляемой величины n даже для оптимального переходного процесса на максимальном режиме работы ГТД, в стендовых условиях является неприемлемо большим. Расширить диапазон устойчивых режимов с одновременным устранением или уменьшением колебательности при приемлемом быстродействии и сохранением статической точности в САУ частотой вращения возможно за счёт применения в регуляторе корректирующего устройства, обладающего форсирующими свойствами, т.е. за счёт применения изодромного регулятора с передаточной функцией  . (1.6) . (1.6)Смысл введения корректирующих устройств в САУ частотой вращения состоит в том, чтобы форсированием корректирующего устройства регулятора скомпенсировать инерционность объекта управления ГТД и тем самым улучшить динамические свойства САУ. 20. Анализ устойчивости САУ частоты вращения. Структурная схема такой системы управления и направления прохождения сигналов могут быть представлены следующим образом (рис. 1.4):  Рис. 1.. Структурная схема изодромного регулятора частоты вращения ГТД С учётом обозначенных на схеме передаточных функций звеньев, уравнения движения для звеньев примут следующий вид:  ; (1.11) ; (1.11) ; (1.12) ; (1.12) ; (1.13) ; (1.13) , (1.14) , (1.14)где  . .Решая эту систему уравнений относительно Xn, получим следующее уравнение замкнутой системы  . .(1.15) Тогда передаточная функция САУ может быть записана так  (1.16) (1.16)Передаточные функции отдельных звеньев САУ имеют вид: центробежного тахометра сервомотора (гидропривода)  ; ;  ; ;Изодрома  ; ;ГТД  . . влияние коэффициента самовыравнивания двигателя влияние коэффициента самовыравнивания двигателяна устойчивость системы и переходные процессы, поэтому примем уравнение движения для двигателя в самом общем виде, что соответствует передаточной функции  . .Подставляя передаточные функции звеньев регулятора и двигателя в выражение для передаточной функции САУ, получим  . (1.18) . (1.18)Устойчивость системы управления определим, применяя критерий Рауса-Гурвица,  . (1.19) . (1.19)Раскрывая значения коэффициентов, получаем такое условие устойчивости.  . (1.20) . (1.20)Отсюда видно, что запас устойчивости системы управления увеличивается с увеличением значения коэффициента самовыравнивания  , так как в этом случае значение неравенства возрастает. Это также означает, что с уменьшением частоты вращения, когда значение уменьшается, запас устойчивости также уменьшается, и переходные процессы могут ухудшаться. Предположив, что , так как в этом случае значение неравенства возрастает. Это также означает, что с уменьшением частоты вращения, когда значение уменьшается, запас устойчивости также уменьшается, и переходные процессы могут ухудшаться. Предположив, что  , получим , получим . (1.21) . (1.21)Это условие устойчивости практически всегда выполняется, но величина неравенства может оказаться недостаточной для получения требуемых запасов по устойчивости. |