1 Краткая техническая характеристика. 2 Оценка тяговоскоростных характеристик
 Скачать 219.85 Kb. Скачать 219.85 Kb.
|

|
Содержание Введение. 1 Краткая техническая характеристика. 2 Оценка тягово-скоростных характеристик. 2.1 Уравнение движения автомобиля. 2.2 Внешняя скоростная характеристика двигателя. 2.3 Тяговая характеристика автомобиля. 2.3.1 Радиус качения. 2.3.2 Расчет кинематической скорости автомобиля по передачам. 2.3.3 Коэффициент полезного действия трансмиссии. 2.3.4 Расчет касательной силы тяги на ведущих колесах автомобиля. 2.3.5 Сила сопротивления дороги. 2.3.6 Сила сопротивления воздуха. 2.3.7 Практическое использование тяговой характеристики автомобиля. 2.4 Мощностная характеристика автомобиля. 2.5 Динамическая характеристика автомобиля. 2.6 Разгон автомобиля. 2.6.1 Коэффициент вращающихся масс. 2.6.2 Ускорение автомобиля при разгоне. 2.6.3 Определение времени разгона автомобиля 2.6.4 Определение пути разгона автомобиля 3. Топливная экономичность автомобиля 3.1 Построение топливной характеристики автомобиля. Литература. Введение При разработке и доводке конструкций автомобилей ЗиЛ наиболее серьезное внимание, помимо технологичности, уделялось их долговечности, надежности, безопасности, облегчению управления, повышению плавности хода в снижению затрат труда на техническое обслуживание в ремонты в процессе эксплуатации. В процессе работы над созданием автомобилей в основу были положены опыт отечественного автомобилестроения, тщательный анализ и исследование ряда современных моделей зарубежных грузовых автомобилей подобного класса, широкая постановка научно-исследовательских и опытно-конструкторских работ по рабочим процессам, системам и элементам конструкций. В широких масштабах осуществлялся поиск оптимальных мощностных, размерных и конструктивных вариантов. С точки зрения потребителя, модели автобусов ГАЗ обладают рядом преимуществ. Они динамичны, улучшена их устойчивость, легки в управлении в любых дорожных и климатических условиях. Рассматриваемый в данной работе грузовой автомобиль ГАЗ 4501 — средней грузоподъемности. 1. Краткая техническая характеристика Таблица 1.1 – Техническая характеристика автомобиля ГАЗ 4301.
2. Оценка тягово-скоростных характеристик 2.1 Уравнение движения автомобиля Оценку тягово-скоростных свойств автомобиля производят, решая уравнение его движения. Уравнение движения автомобиля связывает силу, движущую автомобиль, с силами сопротивления и позволяет определить характер прямолинейного движения автомобиля, т. е. в каждый момент времени найти ускорение, скорость, время движения и пройденный автомобилем путь. Окружная сила на ведущих колесах  при движении автомобиля затрачивается на преодоление сил сопротивления воздуха при движении автомобиля затрачивается на преодоление сил сопротивления воздуха  , качению , качению  , подъему , подъему  и разгону и разгону  автомобиля, т. е. автомобиля, т. е. . (2.1) . (2.1)Здесь знак "-" при силе соответствует движению автомобиля на подъеме, а знак "+" – движению на спуске; знак "-" при силе соответствует разгону автомобиля, а знак "+" – торможению.Решение уравнения движения автомобиля в общем виде аналитическими методами практически невозможно, так как неизвестны точные функциональные зависимости, связывающие силы, действующие на автомобиль, с его скоростью. Поэтому уравнение движения автомобиля (2.1) решают численными методами на ЭВМ или приближенно, используя графоаналитические методы. Наибольшее распространение получили метод силового (тягового) баланса, метод мощностного баланса и метод динамической характеристики. 2.2 Внешняя скоростная характеристика двигателя Скоростная характеристика может быть построена расчетным путем по эмпирическим зависимостям, либо по данным, полученным в результате стендовых испытаний двигателя. В данном курсовом проекте для получения скоростной характеристики мы используем эмпирические зависимости. Построение кривых скоростной характеристики ведется в интервале частот вращения коленчатого вала от Определим интервал частот вращения коленчатого вала для двигателя. Минимальные устойчивые обороты автомобиля Расчетные точки кривой эффективной мощности определяются по формуле Лейдермана через каждые 440  , (2.2) , (2.2)где  - эффективная мощность ( - эффективная мощность ( – номинальная эффективная мощность ( – номинальная эффективная мощность ( – частота вращения коленчатого вала при номинальной мощности ( – частота вращения коленчатого вала при номинальной мощности ( – частота вращения коленчатого вала в искомой точке скоростной характеристики ( – частота вращения коленчатого вала в искомой точке скоростной характеристики (Коэффициенты  , ,  и и  зависят от коэффициентов приспособляемости двигателя по крутящему моменту зависят от коэффициентов приспособляемости двигателя по крутящему моменту  и частоте вращения и частоте вращения  : : ; (2.3) ; (2.3) ; (2.4) ; (2.4) , (2.5) , (2.5)где  ; ;   ; ;  ; ;  , , При этом соблюдается равенство + + = 1.Производим вычисление значений эффективной мощности двигателя для выбранных частот вращения коленчатого вала. Результаты вычислений сводим в таблицу расчетов внешней скоростной характеристики (см. табл. 3.2). Расчетные точки кривой эффективного крутящего момента определяются через каждые 440  ; ; где  - эффективный крутящий момент ( - эффективный крутящий момент (Производим вычисление значений эффективного крутящего момента двигателя для выбранных частот вращения коленчатого вала. Результаты вычислений сводим в таблицу расчетов внешней скоростной характеристики (см. табл. 3.2). Условия работы двигателя, установленного на автомобиле, отличаются от стендовых: двигатель работает с другими впускными и выпускными системами, на нем устанавливаются дополнительные механизмы, на привод которых затрачивается определенная мощность, двигатель работает при другом температурном режиме. Поэтому мощность двигателя, установленного на автомобиле  , несколько меньше мощности, полученной при стендовых испытаниях . , несколько меньше мощности, полученной при стендовых испытаниях .При использовании для тягово-скоростных расчетов стендовой внешней скоростной характеристики, значения мощности уменьшают путем умножения на коэффициент  , зависящий как от конструктивных особенностей и условий эксплуатации автомобиля, так и от особенностей стандарта, по которому была снята внешняя скоростная характеристика. Следовательно, мощность и момент, передающиеся в трансмиссию автомобиля, определяются по выражениям: , зависящий как от конструктивных особенностей и условий эксплуатации автомобиля, так и от особенностей стандарта, по которому была снята внешняя скоростная характеристика. Следовательно, мощность и момент, передающиеся в трансмиссию автомобиля, определяются по выражениям: ; (2.7) ; (2.7) ; (2.8) ; (2.8)В приближенных расчетах можно принимать = 0,93...0,96. Большие значения относятся к двигателям легковых автомобилей.Зависимости мощностей  , и моментов , и моментов  , двигателя, установленного на автомобиле, от частоты вращения коленчатого вала , наносятся на график внешней скоростной характеристики (рис. 2.1). , двигателя, установленного на автомобиле, от частоты вращения коленчатого вала , наносятся на график внешней скоростной характеристики (рис. 2.1).Результаты расчетов сводятся в табл. 2.1. Таблица 2.1 – Показатели внешней скоростной характеристики.
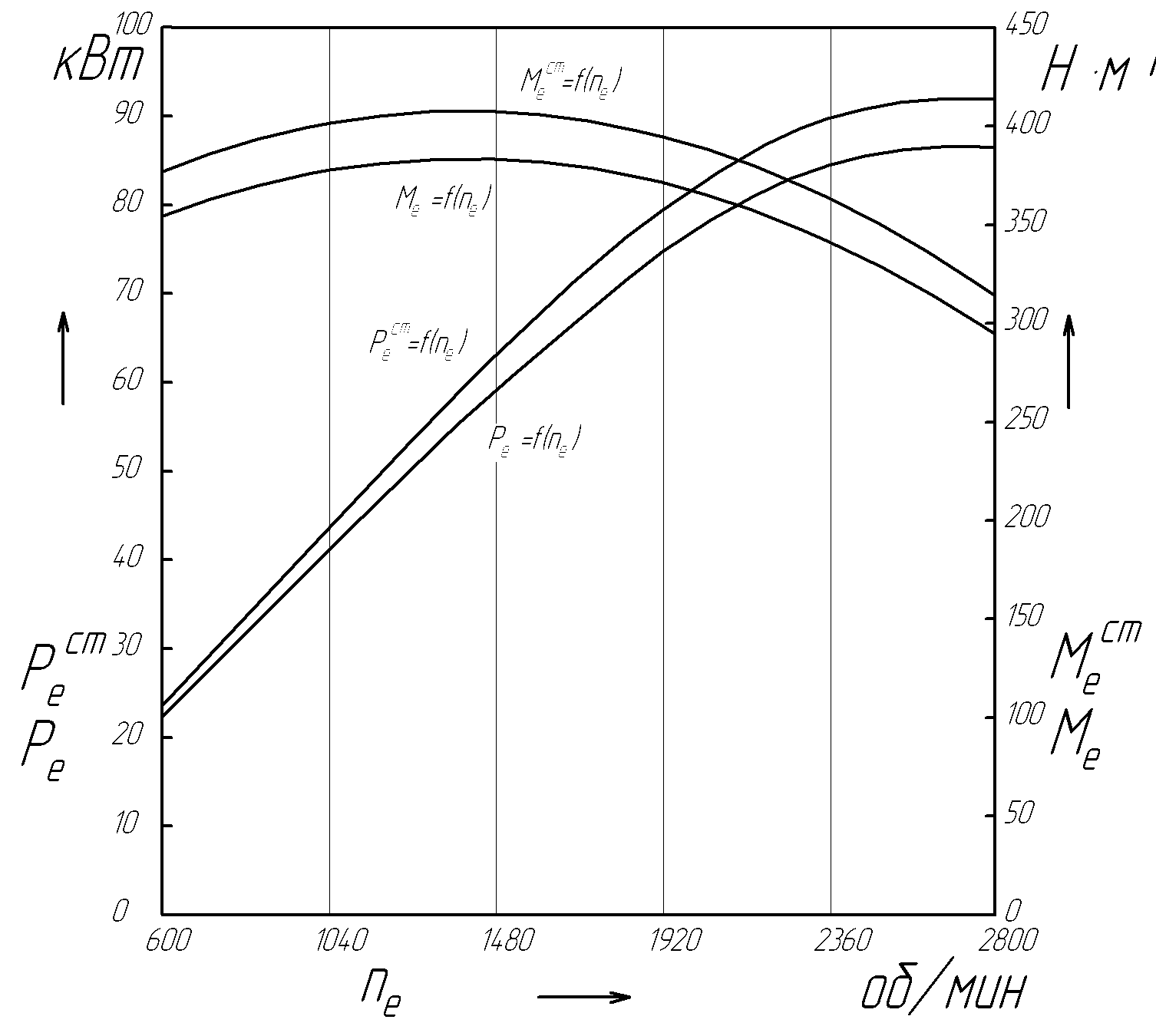 Рисунок 2.1 – График внешней скоростной характеристики. 2.3 Тяговая характеристика автомобиля 2.3.1 Радиус качения Для определения движущей силы автомобиля необходимо знать величину радиуса качения ведущего колеса. Так как на колесах автомобиля установлены эластичные пневматические шины, то величина радиуса качения колес во время движения изменяется. Радиус качения характеризует путь, пройденный колесом за один оборот. Он соответствует радиусу такого фиктивного жесткого колеса, которое при отсутствии пробуксовывания и проскальзывания имеет одинаковую с действительным колесом угловую  и поступательную и поступательную  скорости качения. скорости качения.Радиус качения колеса зависит от нормальной нагрузки, внутреннего давления воздуха в шине, окружной силы, коэффициента сцепления колеса с дорогой и поступательной скорости движения колеса при его качении. Расчетный радиус качения  вычисляется по формуле: вычисляется по формуле: ; (2.9) ; (2.9)где  – наружный диаметр шины; – наружный диаметр шины;  - статический радиус шины. - статический радиус шины.Приближенно статический радиус шины можно определить по цифрам, указанным в обозначении шины: , (2.10) , (2.10)где  – посадочный диаметр обода, мм; – посадочный диаметр обода, мм; = Н/В (Н и В – высота и ширина профиля шины, мм); = Н/В (Н и В – высота и ширина профиля шины, мм); – коэффициент, учитывающий смятие шины под нагрузкой. – коэффициент, учитывающий смятие шины под нагрузкой. . .Расчетный радиус качения превышает статический на 2 ... 3 % в зависимости от скорости движения автомобиля (большие значения относятся к скоростям порядка 100 км/ч),т. е.  . . . . |