Курсовая. 1 Описание системы терморегулирования
 Скачать 1.99 Mb. Скачать 1.99 Mb.
|

|
6.3 Оценка вынужденной ошибки системы где Передаточная функция замкнутой системы по ошибке Так как система астатическая, то статическая ошибка Коэффициенты Тогда 7 Повышение быстродействия системы терморегулирования 7.1 Синтез последовательного корректирующего звена Необходимо повысить быстродействие данной системы в 1,5 раза. Для этого вводим в структуру системы последовательное корректирующее звено. Таким образом, для ЛАХ желаемая частота среза На рисунке 13 строим От частоты ЛАХ корректирующего звена Разностная ЛАХ При этом необходимо учесть, что будет применяться пассивное корректирующее звено и, следовательно, его статический коэффициент передачи не может быть больше единицы. Поэтому Передаточная функция корректирующего звена где По графику 7.2 Реализация корректирующего звена По виду  Рисунок 14 – Схема пассивного корректирующего звена Передаточная функция для этого электрического элемента Емкость конденсатора Из ряда стандартных сопротивлений Е24 [3] выбираем Тогда Из ряда стандартных сопротивлений Е24 [3] выбираем Следовательно, Передаточная функция корректирующего звена примет вид Поскольку коэффициент усиления корректирующего звена меньше единицы, то это звено ослабляет общее усиление системы в Пересчитаем резисторы выберем Из ряда стандартных сопротивлений Е24 [3] выбираем Таким образом, передаточная функция скорректированной системы имеет следующий вид и тогда Логарифмическая фазовая характеристика для скорректированной системы рассчитывается по формуле, или подставив значения, Значения для построения Таблица 9
На рисунке 13 строим ЛЧХ скорректированной системы 7.3 Проверка и оценка результатов коррекции Используя передаточную функцию замкнутой системы построим переходный процесс системы с улучшенным быстродействием при помощи программы MathCAD 2000 Professional.  , , , , . .Значения функций Таблица 10
…
Таблица 11
…
На рисунке 15 изображен график переходного процесса скорректированной системы. По графику можно увидеть, что система сохраняет плавный апериодический процесс, отсутствует перерегулирование. Длительность переходного процесса 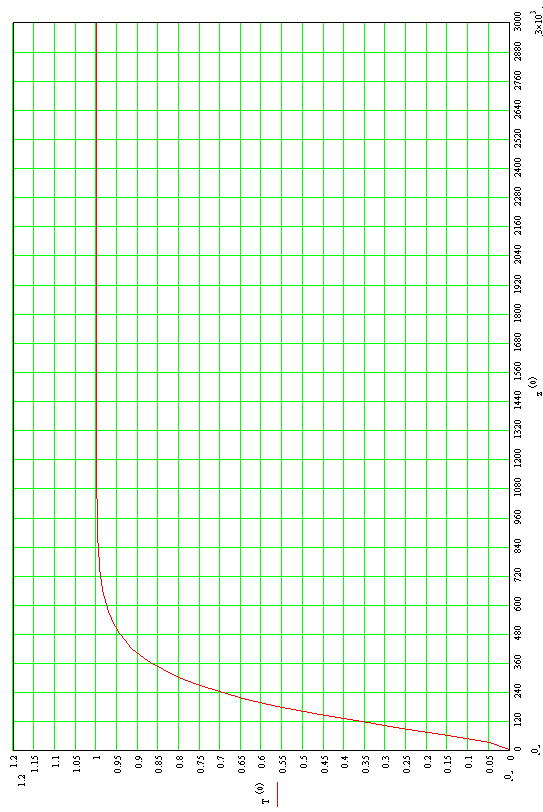  Заключение В данной курсовой работе была исследована система терморегулирования. Сначала, система была исследована на устойчивость с помощью алгебраического и частотного критериев. В обоих случаях система оказалась устойчивой. А также, построили область устойчивости в плоскости параметров Библиографический список 1.Федотов А.В. Анализ систем автоматического регулирования при проектировании средств автоматизации: Учеб. пособие. - Омск: Изд-во ОмГТУ, 1995. – 48 с. 2.Чистяков В.С. Краткий справочник по теплотехническим измерениям. – М.: Энергоатомиздат, 1990. – 320 с. 3.Справочник по элементам радиоэлектронных устройств. Под ред. В.Н. Дулина, М.С. Жука. – М.: Энергия, 1977. – 576 с. 4. Федотов А.В. Теория автоматического управления: Конспект лекций – Омск: Изд-во ОмГТУ, 2007. – 176с. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||