Шпора по ТП, почти все вопросы (РЛС П-18), 1ый семестр. 1 Техническая подготовка Физические явления, положенные в основу радиолокации
 Скачать 25.01 Mb. Скачать 25.01 Mb.
|

|
1.1. Техническая подготовка:
Радиолокацией называется область радиотехники, использующая явления отражения и излучения электромагнитных волн различными объектами для обнаружения этих объектов, определения их пространственного положения (измерения координат) и выявления некоторых физических характеристик. Радиотехническое, устройство, предназначенное для обнаружения и определения местоположения объектов в пространстве путем использования явления отражения электромагнитных волн от указанных объектов, называется радиолокационной станцией (РЛС). Задачи, решаемые радиолокационными станциями, многообразны и достаточно сложны. Существует большое число различных типов РЛС. Основными из них являются следующие; станции обнаружения целей; наземные и корабельные станции управления и наведения истребительной авиации; станции управления беспилотными летательными аппаратами; станции перехвата, устанавливаемые на самолетах-истребителях; радиовысотомеры, служащие для определения высоты полета цели. Перечисленные РЛС выполняют основную задачу радиолокации - определение координат объектов. Так, РЛС обнаружения ведут круговой обзор пространства и измеряют две координаты — дальность и азимут (или три координаты дальность, азимут и высоту полета воздушного объекта). Основное требование к данным РЛС - большая дальность действия, которая достигается за счет применения антенн больших размеров, передатчиков с высокой энергией зондирующих сигналов и высокочувствительных приемников. РЛС управления и наведения истребительной авиации служат для обнаружения самолетов (с использованием предварительных данных РЛС дальнего обнаружения) и для наведения на воздушные цели своих самолетов-перехватчиков. Для решения этих задач указанные станции должны измерять три текущие координаты цели: дальность, азимут, угол места, высоту. Основными требованиями к РЛС управления и наведения истребительной авиации являются значительная дальность действия и точность измерения координат. РЛС перехвата устанавливаются на борту самолета перехватчика, служат для точного и быстрого определения координат объекта поражения и открытия по нему прицельного огня. Обнаружение целей и определение их координат (рис. 1) проводится радиолокационными станциями (РЛС), Координаты цели (азимут, дальность, угол места) измеряются относительно точки стояния станции. Наклонной дальностью (  ) называется кратчайшее расстояние от станции до цели. Расстояние между РЛС и проекцией цели на горизонтальную плоскость, в которой лежит, РЛС, называется горизонтальной дальностью до цели. ) называется кратчайшее расстояние от станции до цели. Расстояние между РЛС и проекцией цели на горизонтальную плоскость, в которой лежит, РЛС, называется горизонтальной дальностью до цели.Азимут цели — это угол (  ), измеренный и точке стояния РЛС между направлением на север и проекцией наклонной дальности на горизонтальную плоскость, считываемой по часовой стрелке. ), измеренный и точке стояния РЛС между направлением на север и проекцией наклонной дальности на горизонтальную плоскость, считываемой по часовой стрелке.Угол  , заключенный между линией наклонной дальности и ее проекцией на горизонтальную плоскость, называется углом места. , заключенный между линией наклонной дальности и ее проекцией на горизонтальную плоскость, называется углом места.Зная угол места ( ) и наклонную дальность до цели, можно определить высоту цели: где  - радиус земного шара (6370 км). - радиус земного шара (6370 км). - поправка на кривизну земной поверхности. - поправка на кривизну земной поверхности.Измерение координат цели в радиолокации основано на следующих физических явлениях:
 Рис. 1. Координаты воздушной цели Сущность отражения электромагнитных волн от препятствий состоит в том, что под их влиянием в этих препятствиях возникает переменный ток, который служит источником вторичного излучения. Например, на пути ЭМВ оказался самолет. Одна часть энергии ЭМВ расходуется на нагрев поверхности самолета, на тепло, а другая вновь излучается в окружающее пространство в виде вторичных (отраженных) волн, Отражение радиоволн будет происходить от любого тела, если оно по электрическим свойствам (проводимости или диэлектрической проницаемости) значительно отличается от воздуха - среды, в которой распространяются радиоволны, и если размеры тела не очень малы по сравнению с длиной волны. При относительно малых размерах тела по сравнению с длиной волны происходит его огибание радиоволнами. Явление огибания предметов радиоволнами носит название Дифракции. Сущность обнаружения воздушных объектов (самолетов) с помощью электромагнитных волн заключается в том, что если иметь источник генерирования ультракоротких или дециметровых волн и даже сантиметровых электромагнитных волн и излучение этих волн от источника генерирования направлять в пространство, то, посылая такой луч электромагнитных волн на какой-либо предмет, можно получить всегда обратный отраженный электромагнитный луч. Приняв такой отраженный луч и определив направление его распространения, можно весьма точно определить не только направление на отражающую поверхность, но и место ее нахождения. Расстояние до цели можно определить путем измерения времени от посылки этих волн до их обратного приема, что может быть сделано модуляцией, т. е. наложением на основную частоту дополнительной частоты; замером фазы полученных электромагнитных волн можно точно определить время прохождения утих волн. А поскольку скорость распространения электромагнитных волн постоянная, постольку расстояние до отражаемой поверхности, т. е. до самолета, получится как следствие. Постоянство скорости распространения ЭМВ в пространстве равно скорости света С - 300000 км/с. Следовательно, измерив время запаздывания (  ) отраженного радиоимпульса относительно излученного, можно определить наклонную дальность до цели по формуле: ) отраженного радиоимпульса относительно излученного, можно определить наклонную дальность до цели по формуле: Разделить на 2 необходимо потому, что радиоимпульс за время проходит двойной путь (от РЛС до объекта и обратно). При запаздывании отраженного сигнала относительно излученного на 1 мкс (микросекунду) расстояние до объекта составляет: При времени запаздывания в 1 мкс (микросекунду) расстояние до объекта будет 150 м. Следовательно, для определения дальности необходимы устройства, измеряющие очень малые отрезки времени. Измерение таких коротких интервалов времени осуществляется с помощью электронно-лучевых трубок (ЭЛТ). Чтобы измерить это время, необходимо зафиксировать момент начала излучения зондирующего импульса и момент прихода отраженного от цели сигнала. При разных временах запаздывания отметки отраженных сигналов будут высвечиваться в различных точках экрана относительно начала излучения (центра экрана), что будет соответствовать конкретной дальности для данного времени запаздывания. Разбив весь экран ЭЛТ в виде шкалы расстояний, можно определить наклонную дальность до обнаруженных целей. Прямолинейность распространения ЭМВ в пространстве позволяет определить угловые параметры цели: азимут и угол места. Антенны РЛС концентрируют энергию излучения в основном в горизонтальной плоскости, т. е. при неподвижной антенне будет просматриваться только малая часть пространства. Вращая антенну по азимуту, можно просмотреть обозримую часть пространства для данной РЛС. Для определения азимута цели развертка ЭЛТ синхронно вращается с антенной РЛС. Следовательно, эхо-сигнал возникает на экране ИКО только тогда, когда цель попадает в область направленного излучения ЭМВ антенной. Если азимут антенны, т. е. угол между направлением на север и электрической осью антенны составит, например - 90°, то и положение развертки будет соответствовать 90°. Проградуировав соответствующим образом индикатор, можно определить азимут любой цели. Переносчиком полезной информации в радиолокации являются радиосигналы, приходящие от цели к радиолокационной станции. Итак, основное назначение РЛС – это определение текущих координат воздушных объектов, таких как наклонная дальность и угловые координаты. Диапазоны длин волн, используемые в радиолокации. Важным фактором при выборе диапазона длин волн является характер отражения радиоволн от целей, если размеры цели меньше длины волны, то интенсивность отражения мала. При этом цель можно уподобить антенне с очень малой действующей высотой или малой эффективной площадью. Другой крайний случай, когда размеры цели много больше длины волны (близкой к оптическому диапазону), интенсивность отражения достигает заметной величины, мало зависит от длины волны и определяется в основном отражающими свойствами и размерами цели. В промежуточном случае соизмеримости размеров цели с длиной волны возможно резонансное возбуждение участков поверхности цели, при котором интенсивность отражения заметно возрастает в некоторых направлениях. Учитывая размеры реальных целей, приходим к выводу, что для того, чтобы длина волны была много меньше этих размеров или соизмерима с ними, в радиолокации необходимо использовать ультракороткие волны (УКВ). При выборе диапазона волн важное значение имеют особенности распространения радиоволн в атмосфере, в частности резонансное поглощение (например, для кислорода на частоте 60 ГГц поглощение составляет около 14 дБ/км), что вынуждает избегать применения соответствующих частот. Другая причина использования этого диапазона, особенно волн более коротких, чем метровые, связана с размерами антенн. Дело в том, что угловая ширина диаграммы направленности антенны независимо от ее типа прямо пропорциональна длине волны и обратно пропорциональна соответствующему размеру. Для зеркальной антенны в виде усеченного параболоида ширина луча по точкам половинного значения мощности (в градусах)  (1) (1)где  - длина волны, a - длина волны, a  - максимальный линейный размер зеркала в плоскости луча, так что, например, при = 3 см для получения ширины луча - максимальный линейный размер зеркала в плоскости луча, так что, например, при = 3 см для получения ширины луча  = 3° требуется = 65 см, а чтобы луч имел такую ширину при длине волны =3м размер зеркала должен составлять 6,5 м. = 3° требуется = 65 см, а чтобы луч имел такую ширину при длине волны =3м размер зеркала должен составлять 6,5 м.Формула (1) показывает, что острый луч, обеспечивающий разделение нескольких целей по угловой координате и высокую точность определения координат при заданных размерах антенны, можно получить только при достаточно короткой волне .Поэтому в ряде авиационных РЛС используют сантиметровые радиоволны, а для обзора летного поля в аэропортах - миллиметровые. С точки зрения повышения разрешающей способности и точности (т.е. информативности радиолокационного сигнала) необходимо расширять полосу частот зондирующего сигнала, что, например, достигается уменьшением длительности зондирующих импульсов либо применением специальных сложных сигналов. Естественно, что расширение полосы передаваемых частот требует повышения несущей частоты сигнала. В диапазоне 30... 1000 МГц для работы РЛС выделены определенные полосы частот (например, 137... 144, 216…225, 400...450, 890…942 МГц). Следует отметить, что метровый диапазон в настоящее время сравнительно редко используется для целей радиолокации. Вместе с тем, так как УКВ, как правило, распространяются лишь в пределах прямой видимости, то для обеспечения загоризонтного радиолокационного наблюдения могут найти применение декаметровые волны. В современных РЛС используются дециметровые сантиметровые, мил-лиметровые радиоволны, а в лазерных локаторах - волны оптического диапазона. Согласно рекомендациям Международной организации гражданской авиации, радиолокации отводится почти 30% диапазона частот 1...10 ГГц. Широко используются полосы частот, где средняя длина волны  = (20, 10, 5, 3) см. В иностранной литературе ширина частотного спектра часто оценивается в октавах (интервал, для которого отношение граничных частот F1/F2 = 2 следует отметить, что метровой диапазон в настоящее время сравнительно редко используется для целей радиолокации. Вместе с тем, т.к. УКВ, как правило, распространяется лишь в пределах прямой видимости, то для обеспечения загоризонтного радиолокационного наблюдения могут найти применении декаметровые волны. = (20, 10, 5, 3) см. В иностранной литературе ширина частотного спектра часто оценивается в октавах (интервал, для которого отношение граничных частот F1/F2 = 2 следует отметить, что метровой диапазон в настоящее время сравнительно редко используется для целей радиолокации. Вместе с тем, т.к. УКВ, как правило, распространяется лишь в пределах прямой видимости, то для обеспечения загоризонтного радиолокационного наблюдения могут найти применении декаметровые волны.Общая характеристика радиолокационного канала. Систему РЛС - цель можно рассматривать как радиолокационный канал наподобие радиоканалов связи. Основными составными частями РЛС являются передатчик, приемник, антенное и оконечное устройство. Передатчик вырабатывает высокочастотные (СВЧ) колебания, которые модулируются по амплитуде, частоте или фазе иногда весьма сложным образом. Эти колебания подаются в антенное устройство и образуют зондирующий сигнал. Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с гармоническими колебаниями могут использоваться частотно-модулированные (ЧМ) и др. После того как электромагнитная волна, падающая на цель (первичная волна) вызывает в ее теле вынужденные колебания электрических зарядов, цель подобно обычной антенне создает свое электромагнитное поле. Это поле представляет собой вторичную, т.е. отраженную, электромагнитную волну, создающую в РЛС радиолокационный сигнал, который является носителем информации о цели. Так, амплитуда сигнала в определенной степени характеризует размеры и отражающие свойства цели, время запаздывания относительно начала излучения зондирующего сигнала используется для измерения дальности, а частота колебаний благодаря эффекту Доплера несет информацию о радиальной скорости цели. Поляризационные параметры отраженной волны могут быть использованы для оценки свойств цели (ее формы, соотношения между размерами). Наконец, направление прихода отраженной волны содержит информацию об угловых координатах цели. Приемник РЛС необходим для выделения полезного сигнала из помех (так называемая первичная обработка сигнала). Оконечное (выходное) устройство служит для представления радиолокационной информации в нужной потребителю форме. Если потребителем является человек-оператор, то используется визуальная индикация. Дня потребителя в виде АСУ информация преобразуется в кодируемую и при этом в ЭВМ происходит вторичная обработка информации (подобная действиям человека-оператора). Важной составной частью радиолокационного канала, как и любого радио канала, являются помехи различного происхождения. От естественных (собственные шумы, взаимные - от других средств, отражения от метеообразований и др.) до искусственных, создаваемых противником для маскировки своих воздушных средств нападения. Меры, направленные на улучшение работы РЛС в условиях помех, определяют его помехозащищенность, что в настоящее время является одной из наиболее сложных технических задач, решаемых современной наукой и производством. Главные этапы радиолокационного наблюдения - это обнаружение, измерение, разрешение и распознавание. Обнаружением называется процесс принятия решения о наличии целей с допустимой вероятностью ошибочного решения. Измерение позволяет определить координаты целей и параметры их движения с допустимыми погрешностями. Разрешение заключается в выполнении задач обнаружения и измерения координат одной цели при наличии других, близко расположенных по дальности, угловым координатам и скорости. Распознавание дает возможность установить некоторые характерные признаки цели: государственную принадлежность, точечная она или групповая, движущаяся или неподвижная и т.д. 2. Импульсный метод радиолокации. Методы радиолокации В зависимости от происхождения этих сигналов различают: - активную радиолокацию, осуществляется путем облучения цели электромагнитной энергией, излучаемой антенной РЛС, и приема отраженной от цели энергии, когда обязательным условием возникновения сигналов цели является ее облучение радиоволнами, вырабатываемыми самой РЛС; - пассивную радиолокацию, осуществляется путем приема энергии, излучаемой целью. Она основана на явлении излучения электромагнитной энергии любым физическим телом, температура которого выше абсолютного нуля. Все цели удовлетворяют этому условию, поэтому в принципе, возможно, их обнаружение без предварительного облучения. Когда сигналы цели представляют собой ее собственное радиоизлучение (естественное и искусственное). 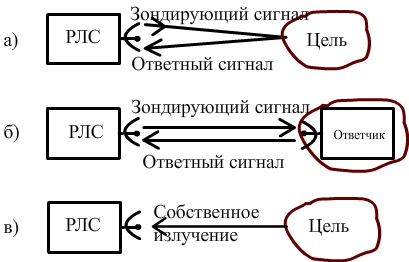 Рис. 2. Виды радиолокационного наблюдения: а — радиолокация с пассивным ответом, б — радиолокация с активным ответом, в—пассивная радиолокация В свою очередь активная радиолокация подразделяется на радиолокацию с пассивным и активным ответом. Виды радиолокационного наблюдения проиллюстрированы на рис.2. Радиолокацией с пассивным ответом называется радиолокация цели по отраженным от нее сигналам; в этом случае сигналы, облучающие цель, называются зондирующими, а сигналы, приходящие от цели - отраженными (эхо-сигналами). Радиолокацией с активным ответом называется радиолокация цели по переизлученным (ретранслированным) целью сигналам, в этом случае сигналы, приходящие к цели, называются запросными, сигналы, приходящие от цели - ответными, а ретрансляционная аппаратура (приемопередатчик), устанавливаемая на цели, - ответчиком. Принцип радиолокации с пассивным ответом, основанный на явлении отражения радиоволн, наиболее универсальный и используется в большинстве радиолокационных систем. Задача обнаружения цели сводится к обнаружению сигнала, излучаемого или переизлучаемого этой целью, на фоне различного рода помех. Любая цель, будучи облученной радиолокаторами, становится источником вторичного излучения. Мощность вторичного излучения зависит от ряда факторов:
Свойства радиоволн распространяться в однородной среде прямолинейно и с постоянной скоростью позволяют определить направление на цель и длину траектории распространения. В связи с этим радиолокацию соответственно подразделяют на радиодальнометрию и радиопеленгацию. Радиодальнометрией называется определение дальности до цели путем измерения длины траектории распространения радиоволн до цели и обратно. Радиопеленгацией называется определение направления на цель, т. е. измерение угловых координат цели. В современной радиолокации известны следующие методы радиодальнометрии: импульсный, частотный, фазовый. В настоящее время наибольшее применение нашел импульсный метод. Принцип действия импульсного радиолокатора рассмотрим по упрощенной структурной схеме (рис. 3а). Передатчик радиодальномера излучает колебания сверхвысокой частоты в •виде периодически повторяющихся зондирующих импульсов, В промежутки времени между зондирующими импульсами происходит прием отраженных импульсов. С выхода приемника принятые импульсы поступают на индикаторное устройство, позволяющее измерить интервал времени между началом излучения зондирующего импульса и началом приема отраженного импульса, а, следовательно, и определить расстояние до отражающей цели.  Рис. 3а. Упрощенная структурная схема импульсной РЛС Рис. 3 б. Графики напряжений, поясняющие работу импульсного радиолокатора При линейной развертке индикатора соотношение между отклонением луча (  ) и измеряемой дальностью ( ) и измеряемой дальностью ( ) определяется по формуле: ) определяется по формуле: где  — постоянная скорость развертки;— время запаздывания отраженного сигнала, т. е. интервал времени между моментом излучения зондирующего импульса и моментом приема отраженного сигнала; — постоянная скорость развертки;— время запаздывания отраженного сигнала, т. е. интервал времени между моментом излучения зондирующего импульса и моментом приема отраженного сигнала;с — скорость распространения радиоволн, величина постоянная и принимаемая равной 3*108 м/с; М — масштаб линейной развертки. Для нормальной работы импульсного радиолокатора необходима синхронизация импульсного передатчика с индикатором, т. е. моменты излучения зондирующего импульса и начала развертки индикатора должны строго совпадать (рис. 3б). |