Шпора по ТП, почти все вопросы (РЛС П-18), 1ый семестр. 1 Техническая подготовка Физические явления, положенные в основу радиолокации
 Скачать 25.01 Mb. Скачать 25.01 Mb.
|

|
3.Принципы определения координат целей и формирование разверток на экранах РЛС. Виды отметок. МЕТОДЫ ОПРЕДЕЛЕНИЯ АЗИМУТА И УГЛА МЕСТА Под азимутом цели понимают угол в горизонтальной плоскости, заключенный между северным направлением географического меридиана, проходящего через точку стояния РЛС и проекцией направления на цель на эту же плоскость (рис. 4). 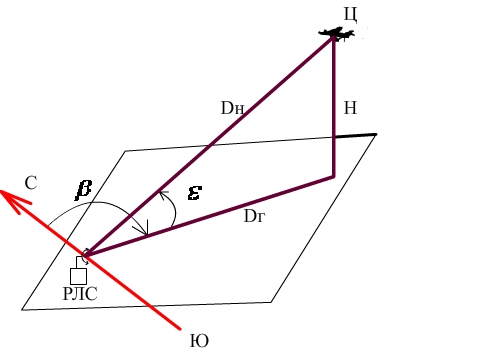 Рис. 4. Координаты цели, определяемые радиолокатором В радиолокации азимут в основном определяется методом максимума. При использовании данного метода направление на цель определяется по наибольшей величине сигнала на выходе приемника РЛС. В момент, когда величина сигнала пеленгуемой цели на выходе приемника будет максимальной, максимум диаграммы направленности антенны совпадает с направлением на цель (как правило, это середина отметки от цели на ИКО).  Рис. 5.Сигнал на выходе приемника РЛС при вращающейся антенне В режиме кругового обзора антенна РЛС вращается в горизонтальной плоскости. На экране амплитудного индикатора сигнал пеленгуемой цели будет непрерывно меняться по амплитуде (рис.5). Как только сигнал достигнет максимальной величины, оператор (или автоматическое устройство) считывает значение азимута цели по азимутальному прибору, указывающему угловое положение антенны. На индикаторе кругового обзора (рис. 6) линия развертки дальности, индикатора вращается синхронно с антенной. Азимут цели в этом случае определяется по угловому положению середины яркостной отметки на экране индикатора.  Рис. 6. Вид экрана ИКО при пеленгации цели методом максимума В радиолокации высота полета цели измеряется путем определения угла места ε и наклонной дальности цели D. При известных значениях угла места и наклонной дальности высота цели Н определяется из выражения:  где  - эквивалентный радиус Земли. - эквивалентный радиус Земли.Решение этого уравнения осуществляется на индикаторе высоты. Методы определения угла места в РЛС - различаются в зависимости от того, в каком диапазоне волн работает станция. Из всех известных методов в настоящее время получил широкое распространение, метод «качающейся диаграммы». Для реализации этого метода диаграмма направленности антенны РЛС должна быть широкой в горизонтальной плоскости и узкой в вертикальной плоскости. Такая диаграмма качается в вертикальной плоскости, дважды облучая цель за период качания. Когда антенна РЛС направлена на цель, то цель облучается зондирующим импульсом, часть энергии которого отражается. Значение угла места цели фиксируется по углу антенны. Фиксация угла производится по яркостной отметке отраженного сигнала на экране специального индикатора (рис. 7).  Рис. 7. Принцип измерения-высоты Для определения координат постановщика помех знания одного направления недостаточно, поэтому используют не одну РЛС, а две-три одновременно, каждая из которых определяет направление относительно своей точки стояния. Все РЛС разнесены относительно друг друга на десятки, иногда сотни километров. В пункте обработки информации, куда поступают данные о пеленгах постановщика, решается задача определения его координат (рис. 8). Метод, при котором положение цели устанавливается путем измерения ее угловых координат несколькими РЛС, называется триангуляционным, потому что определение плоскостных координат производится с помощью решения треугольников, как и в геодезии.  8.Определение местоположения цели триангуляционным методом  Рис. 9. Виды электронных шкал и различных отметок на экране ИКО 5. Общее устройство РЛС. В радиотехнических подразделениях войск ПВО радиолокационные станции предназначены для обнаружения воздушных целей, определения их текущих координат (азимут, дальность, угол места), принадлежности к своим ВС, а также для засечки ядерных взрывов. В состав РЛС входят следующие основные системы: антенно-фидерная, передающая, приемная, синхронизации, индикации, помехозащиты, наземного радиолокационного запросчика, электропитания, защиты и контроля, автоматического съема данных, автоматизированного управления с цифровой вычислительной машиной (АСУ с ЦВМ). Антенно-фидерная система (АФС) предназначена для излучения зондирующих импульсов в пространство, приема отраженных сигналов и подачи их на вход приемной системы. Передающая система предназначена для формирования мощных высокочастотных зондирующих импульсов и подачи их на АФС. Приемная система служит для усиления принятых отраженных сигналов и преобразования их в видеоимпульсы. Система индикации предназначена для визуального наблюдения за целями, измерения их дальности, азимута, высоты, а также определения различных характеристик (скорости полета, принадлежности, характера маневра, количества и типа летательных аппаратов). Система синхронизации обеспечивает синхронную работу всех систем и блоков станции. Система помехозащиты предназначена для устранения мешающего воздействия на оконечное устройство активных, пассивных и несинронно - импульсных помех. Наземный радиолокационный запросчик обеспечивает определение государственной принадлежности самолетов к своим ВС. Система управления, защиты и контроля предназначена для последовательного включения (выключения) РЛС, управления приводами вращения (качания, складывания) антенны, контроля работы блоков и систем, определения параметров и защиты РЛС от аварийных режимов работы. Система электропитания служит для питания всех систем и блоков РЛС первичными и вторичными напряжениями. Система автоматического съема данных предназначена для выделения из действующей на выходе приемника смеси «сигнал + шум» полезных сигналов, а также определения координат обнаруженных целей. Кроме того, на этапе первичной обработки производится кодирование измеренных координат, которые поступают на АСУ и ЦВМ с целью последующей обработки. АСУ с ЦВМ проводит анализ информации, полученной с аппаратуры съема данных в нескольких периодах обзора пространства, устраняет ошибки, оставшиеся после первичной обработки, выбирает оптимальный режим работы станции на основе полного анализа полученной информации. Возможности РЛС по выполнению поставленных задач характеризуются тактическими и техническими характеристиками. 6.Назначение, состав и размещение РЛС на позиции. Назначение: Подвижная радиолокационная станция П-18 предназначена для обнаружения и проводки воздушных целей, определения их текущих координат и принадлежности к своим вооруженным силам. РЛС является дальномером метрового диапазона волн и позволяет определить две координаты - наклонную дальность и азимут полета цели. Кроме того, при сопряжении с высотомером с выносного индикатора кругового обзора (ВИКО) обеспечивается полуавтоматическое целеуказание на высотомеры по азимуту и наклонной дальности. Высота полета цели определяется радиовысотомером типа ПРВ-13, ПРВ-16, сопрягаемого с РЛС П-18. Для опознавания государственной принадлежности целей РЛС оборудована наземным радиолокационным запросчиком 1Л22 (Пароль-4). Наблюдение за воздушной обстановкой, обнаружение целей, определение их координат и принадлежности осуществляется на экранах индикаторов кругового обзора (ИКО и ВИКО). Координаты целей определяются положением отметок целей на ИКО или ВИКО относительно масштабной сетки, принадлежность по наличию отметок опознавания, целеуказание производится с помощью визирной развертки с маркером дальности (рис.1). Определение характеристик цели осуществляется по индикатору контроля.  Рис. 2.1. Вид экрана ВИКО Для защиты личного состава расчета РЛС от воздействия ОМП в станции имеется аппаратура дистанционного управления, которая позволяет вести боевую работу с защищенного КП, удаленного от аппаратной машины, машины АМУ, НРЗ на 500 метров. Защита РЛС от самонаводящихся снарядов (СНС) осуществляется аппаратурой мерцания излучением. При автономной работе РЛС данные о целях операторы передают на КП (ПУ) батальона (роты) по телефону или по радио. РЛС П-18 является модернизацией РЛС П-12 НП и в радиолокационной системе может использоваться: 1. Для обнаружения воздушных целей при автономной работе, а так же для наращивания радиолокационного поля путем сопряжения ее с РЛС П-19, П-37, 5Н87 и др.; 2. Для ввода данных о воздушных целях в автоматизированные системы управления (АСУ). 3. Для полуавтоматического целеуказания (по азимуту, углу места и дальности) зенитному ракетному комплексу при сопряжении с радиовысотомером ПРВ-13. 4. Для получения трех координат воздушных целей (наклонной дальности Дн, азимута β и высоты Нц) при работе в составе радиолокационного комплекса (РЛК), состоящего из П-18 и радиовысотомера ПРВ-16. 5. Для расширения возможностей по обнаружению и проводке маловысотных целей при сопряжении с РЛС П-19 с отражением радиолокационной информации на одном индикаторе. 6. Для обеспечения наведения и полетов истребительной авиации в при аэродромных подразделениях, а также совмещенных с пунктами наведения; 7. Для восстановления радиолокационного поля после ядерных ударов, а также для создания скрытого радиолокационного поля (используется высокая мобильность РЛС). 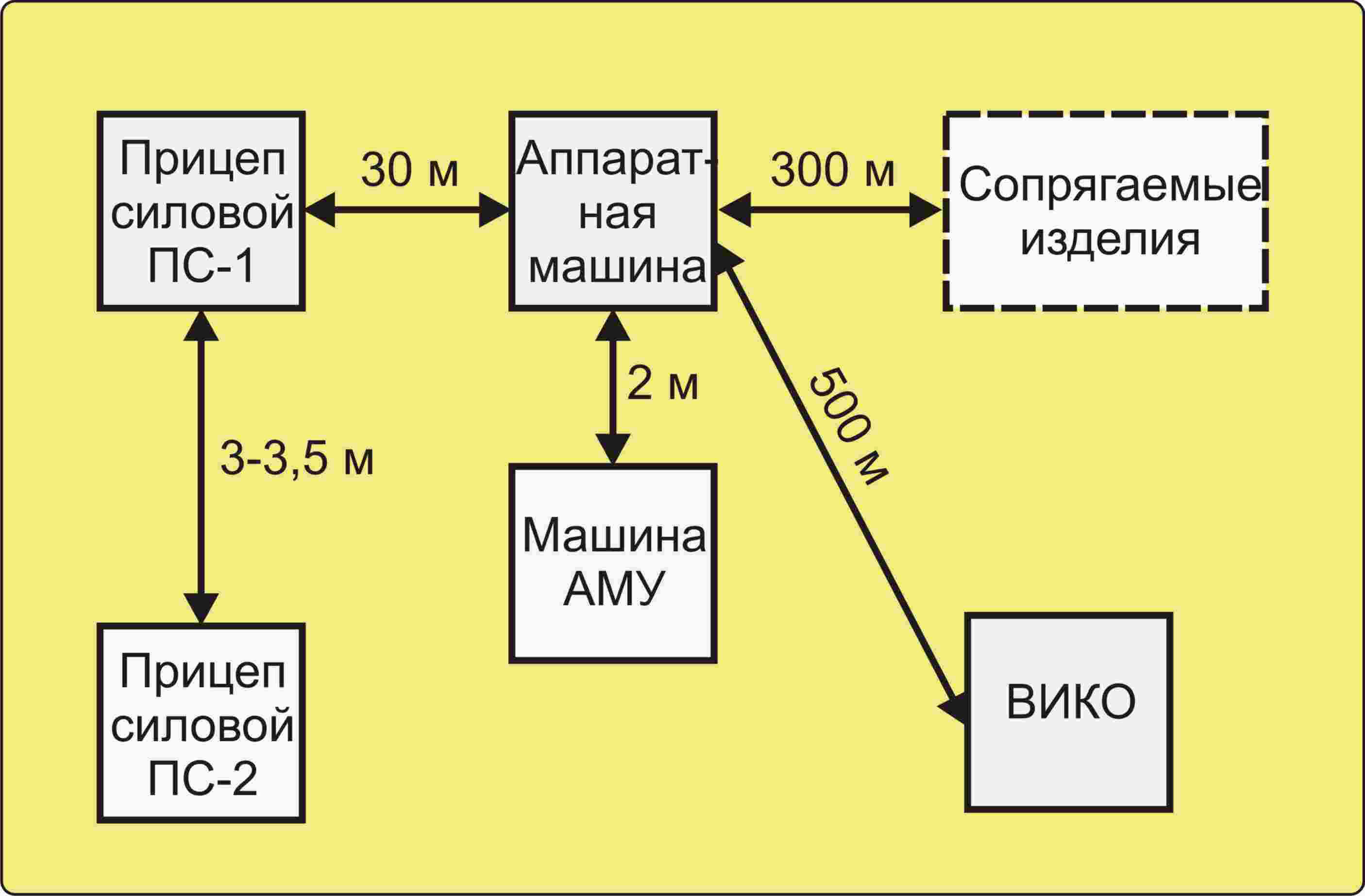 Рис.2.2. Состав и размещение элементов РЛС на позиции. РЛС П-18 высокомобильная. В ее состав входит пять транспортных единиц рис.2.1. 1. Аппаратная машина - автомобиль "Урал-375Д" с кузовом К-375, масса автомобиля 12430 кг. В аппаратной машине размещены радиолокационная аппаратура, аппаратура сопряжения с другими РЛС, контрольно-измерительная аппаратура, аппаратура телефонной и громкоговорящей связи, ЗИП. 2. Машина АМУ - автомобиль "Урал-375Д" со специальным кузовом, масса автомобиля 12936 кг. В машине АМУ размещаются элементы АМУ, ЗИП, кабельные катушки; 3. Наземный радиолокационный запросчик - автомобиль "Урал-375Д" с кузовом К-375, масса автомобиля 12437 кг. В машине НРЗ размещены: аппаратура НРЗ, ЗИП, агрегаты питания АБ-8-Т/230-4/400 аппаратуры НРЗ, антенная система аппаратуры НРЗ, кабель для сопряжения с РЛС; 4. Станции питания. Два прицепа силовых ПС-1 и ПС-2 типа 700I, масса прицепов 6545 и 6631 кг соответственно. В прицепах ПС-1 и ПС-2 размещаются по одному агрегату питания АД-10-Т/230-М, а также кабельные катушки и ЗИП станции. РЛС П-18 является станцией метрового диапазона волн и на формирование диаграммы направленности антенны в вертикальной плоскости влияет поверхность земли. Поэтому при выборе позиции должно учитываться существенное влияние рельефа местности.  Рис.2.1 Состав и размещение элементов РЛС на позиции. Наилучшей позицией является ровная горизонтальная площадка радиусом не менее 1000 метров на открытой местности или вблизи водной поверхности. Допустимые пределы неровности позиции: - на расстоянии 100 м от антенны - до 1 метра; - на расстоянии 500 м - до 3 м; - на расстоянии 1000 м - до 5 м. Уклон позиции допускается не более +5º - -2º. Площадка должна выбираться на расстоянии не менее 1000 м от леса или населенных пунктов сельского типа. Удаленность позиции от крупных населенных пунктов, железнодорожных сооружений (линий), высоковольтных линий электропередачи и многопроводных линий связи должна быть 2000 м - 3000 м. Отдельные деревья и мелкий кустарник на работу станции не влияют. Углы закрытия не должны превышать 15'. Водная поверхность увеличивает дальность обнаружения станции. Поэтому желательно размещать станцию вблизи водной поверхности на отлогом берегу не далее 100 м от берега при ширине зеркала водной поверхности не менее 400 м. 7.Боевые возможности РЛС. Основные тактические характеристики РЛС. Все характеристики радиолокационных станций можно подразделить на тактические и технические. Тактические характеристики РЛС - максимальная дальность обнаружения целей; - зона обзора РЛС и ее параметры; - разрешающие способности по дальности и угловым координатам; - точность определения координат целей; - информационная способность; - помехозащищенность; - эксплуатационная надежность и мобильность. Максимальная дальность обнаружения РЛС является основной характеристикой. Она зависит от технических параметров станции, эффективной отражающей поверхности цели и определяется формулой  (2.1) (2.1)где; Dмакс — максимальная наклонная дальность обнаружения целей; Pи — импульсная мощность передатчика РЛС, кВт; σ — эффективная отражаются поверхность цели, м2; λ — длина рабочей волны, м; Gл — коэффициент усиления антенны; Рпр.мин — чувствительность приемника, Вт. Из величин, входящих в формулу, видно, что дальность обнаружения тем больше, чем больше импульсная мощность передатчика, коэффициент усиления антенны, эффективная отражающая поверхность цели, длина рабочей волны и чем выше чувствительность приемника. 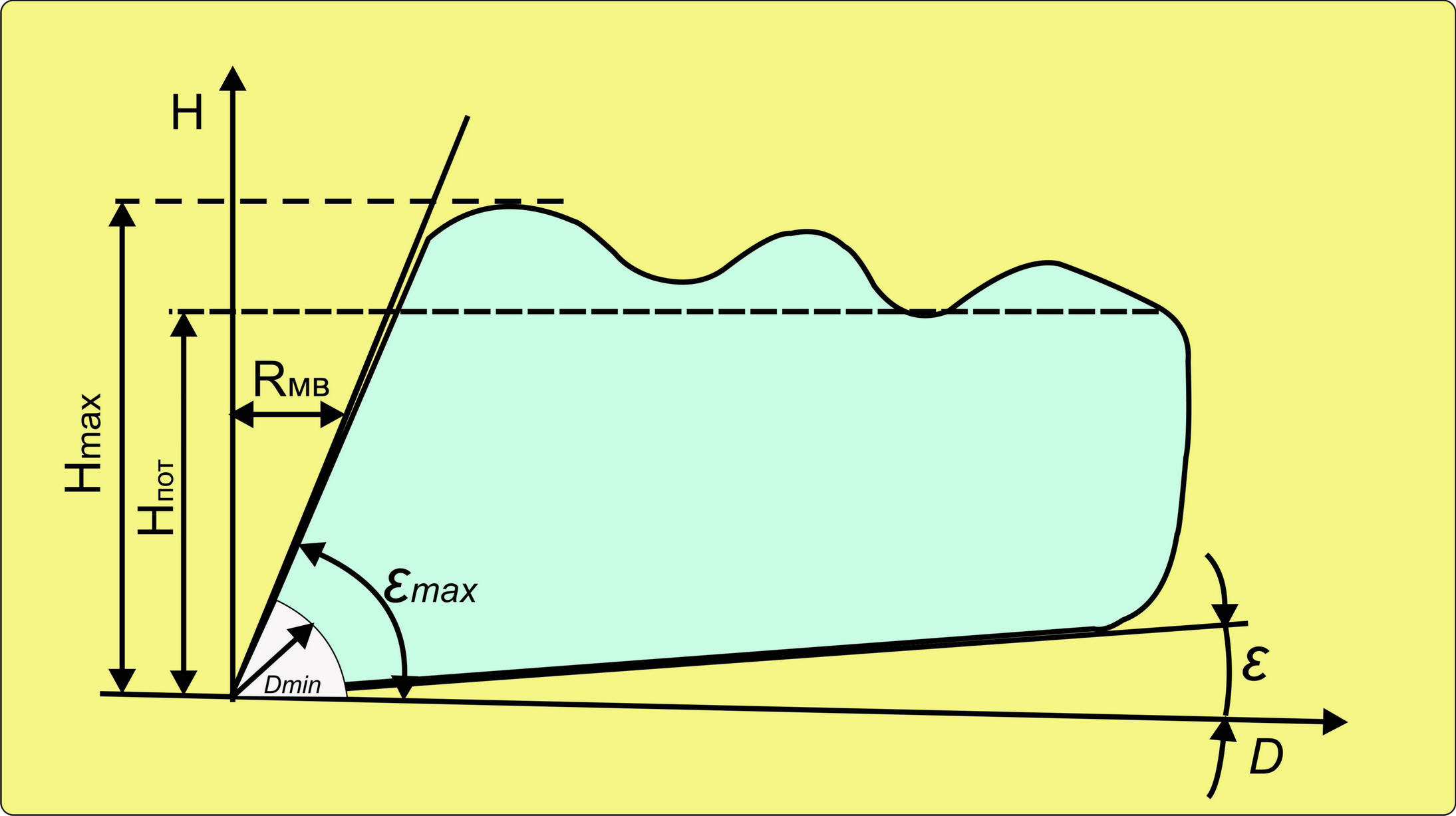 Рис. 3.1. Зона обнаружения РЛС. Зоной обзора РЛС называется часть воздушного пространства, в пределах которого РЛС может обнаруживать цели с заданной вероятностью и измерять их координаты с заданной точностью. Она зависит от формы диаграммы направленности антенны, пределов работы РЛС по азимуту и углу места цели. Радиолокаторы-дальномеры работают, как правило, в круговом режиме, а по углу места цели предел работы ограничивается шириной диаграммы направленности антенны в вертикальной плоскости и пределами наклона при качании по углу места цели. Разрешающие способности радиолокатора характеризуют его возможность обеспечить раздельное наблюдение и измерение координат двух близко находящихся одна от другой целей. Различают разрешающие способности РЛС (рис. 3.2) по дальности, азимуту и углу места цели. 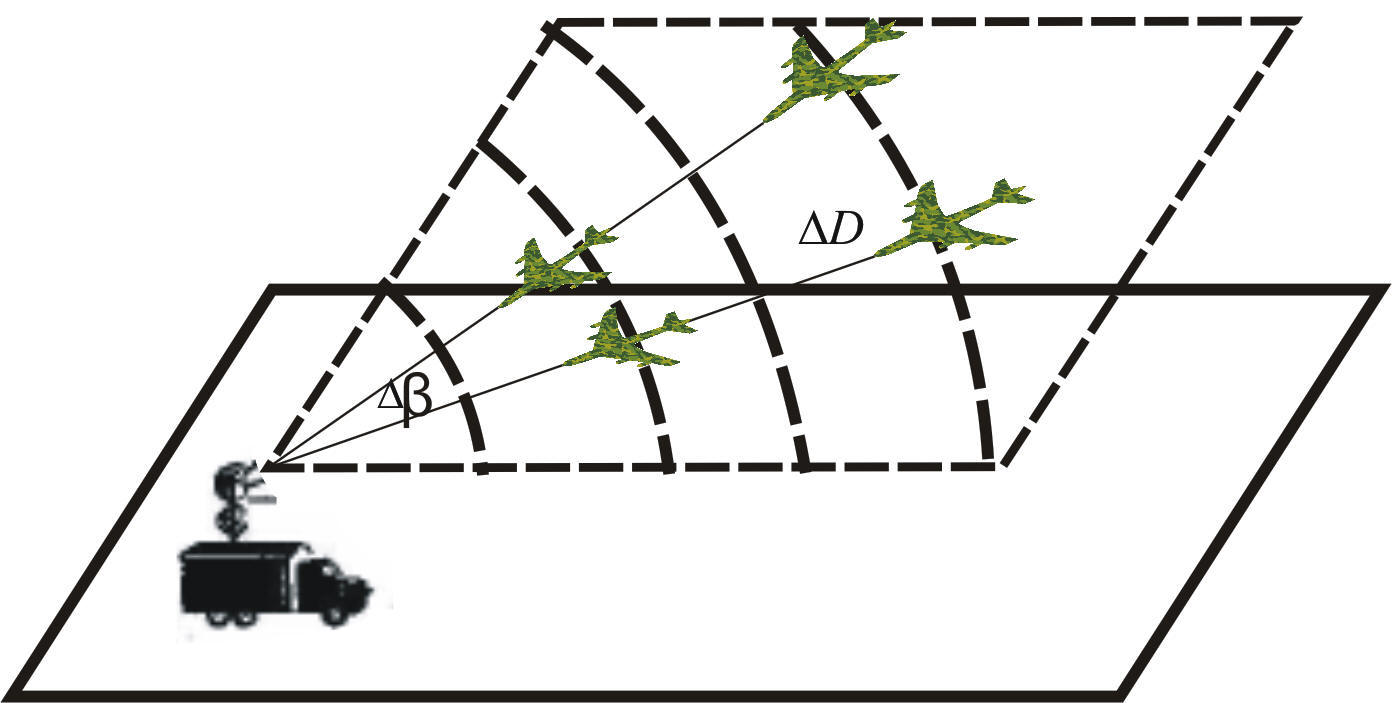 Рис. 3.2. Разрешающая способность РЛС. Разрешающая способность по дальности — это наименьшее расстояние между двумя целями, находящимися на одном азимуте, при котором еще возможно раздельное измерение дальности каждой цели. Разрешающая способность по азимуту — это наименьший угол в горизонтальной плоскости, между двумя целями, находящимися на одинаковой дальности и на одинаковых высотах, при котором еще возможно раздельное измерение азимута каждой целя. Она зависит главным образом от ширины диаграммы направленности в горизонтальной плоскости. Чем уже диаграмма направленности, тем выше разрешающая способность по азимуту. Разрешающая способность РЛС по углу места цели — это наименьший угол в вертикальной плоскости между двумя целями, находящимися на одном азимуте и одной дальности, при котором еще возможно измерение угла места каждой цели. Она зависит в основном от ширины диаграммы направленности антенны в вертикальной плоскости. Точность определения координат целей характеризуется разностью между истинными координатами цели и координатами этой цели, определенными радиолокационной станцией. Об этой точности судят по величине ошибок измерения координат. Эти ошибки зависят от точности настройки блоков РЛС, ориентирования и считывания координат, целей оператором с экранов индикаторов. Информационная способность РЛС — это количество одновременно сопровождаемых целей, по которым выдается информация с заданной дискретностью. Она зависит от количества индикаторов, с которых производится съем координат, способа съема информации (ручного, полуавтоматического, автоматического). Мобильность — это возможность РЛС передислоцироваться на новую позицию. Она определяется временем развертывания (свертывания), скоростью передвижения, проходимостью, запасом хода. 8.Основные тактико-технические данные. К основным техническим характеристикам РЛС относятся: - рабочая частота передатчика (fпер); - длительность импульса (τи); - частота повторения (Fповт); - импульсная мощность передатчика (Ри); - чувствительность приемника (Рпр). Рабочая частота передатчика — это количество полных колебаний синусоидального переменного тока за 1 с. Измеряется она в Герцах (1 Гц — это одно полное колебание в секунду). В РЛС частота передатчиков составляет тысячи и миллионы герц. Длительность импульсов — это промежуток времени от начала излучения импульса до его окончания. От длительности импульса зависит разрешающая способность РЛС по дальности. Частота повторения импульсов — это количество импульсов электромагнитной энергии, излучаемой в пространство за одну секунду. Обычно она составляет сотни импульсов в секунду и определяется заданной дальностью обнаружения РЛС. Импульсная мощность передатчика — это мощность, отдаваемая передатчиком в фидерную систему в течение одного импульса. Чем больше импульсная мощность передатчика, тем больше дальность обнаружения РЛС. Чувствительность приемника — это минимальная мощность сигнала на входе приемника, при которой на его выходе получается преобразованный сигнал, мощность которого достаточна для отображения его на экранах электронно-лучевых трубок индикаторной системы с заданным отношением Uсигн./Uшума. 9.Основные системы и устройства, их назначение и состав. В комплект станции входит:
Вся аппаратура функционально разделена на системы и устройства в блочном исполнении/ Антенно-фидерная система (АФС). АФС служит для передачи мощных импульсов передатчика (зондирующих импульсов) в антенну и излучения их в пространство, а также для приема отраженных сигналов (эхо-сигналов) и передачи их на приемник. Состав:
Передающее устройство (ПДУ). Передающее устройство вырабатывает мощные импульсы электромагнитной энергии в метровом диапазоне волн (зондирующие импульсы). Состав:
Приемное устройство. Приемное устройство усиливает и преобразует поступающие из антенной системы слабые отраженные от целей сигналы до величины, достаточной для использования в индикаторах, аппаратуре защиты и аппаратуре опознавания. Состав:
Система автоматической подстройки частоты (АПЧ). Система автоматической подстройки частоты (АПЧ) обеспечивает поддержание номинальной промежуточной частоты (24,6 wh,) эхо-сигналов в приемном устройстве станции, т. е. стабильность разности частот генератора СВЧ и гетеродина приемника. Состав:
Система перестройки станции (СПС). Состав:
Устройство защиты от помех (СПЦ). Устройство защиты от помех предназначено для подавления (компенсации) пассивных помех, создаваемых отражениями от местных предметов, дипольных отражателей и от других неподвижных объектов. Кроме того, устройство защиты от помех используется для защиты от несинхронных импульсных помех, создаваемых соседними РЛС или другими источниками импульсного излучения. Состав:
Хронизирующее устройство/ Хронизирующее устройство обеспечивает согласованную во времени работу аппаратуры станции, а также формирование, масштабных отметок для индикаторов. Состав:
Индикаторные устройства (ИКО, ВИКО и индикатор контроля). Индикаторные устройства предназначены для визуального наблюдения за воздушной обстановкой в зоне обнаружения РЛС, определения текущих координат целей (наклонной дальности и азимута) и государственной принадлежности целей. Состав:
Система вращения и наклона антенны (СВНА). Система вращения и наклона антенны (СВНА) предназначена для вращения антенны в горизонтальной плоскости и наклона стрел антенны в вертикальной плоскости. Состав:
Система передачи азимута (СПА). Система передачи азимута (СПА) предназначена для формирования напряжений, изменяющихся в соответствии с законом вращения антенны. Эти напряжения используются на сопрягаемых РЛС и системах, в индикаторных устройствах, устройстве хронизации, в аппаратуре СПЦ и запросчике. Состав:
Система управления и сигнализации. Система управления и сигнализации РЛС предназначена для управления оперативными режимами работы РЛС с ИКО или ВИКО и сигнализации о включении того или иного режима. Система управления и сигнализации РЛС обеспечивает включение и выключение РЛС, управление режимами работы ПДУ, СВНА, НРЗ, индикаторных устройств, СПС, АПЧ, СПЦ и системой хронизации РЛС, а также сигнализацию о включенных режимах работы. Состав:
Система сопряжения с РЛС, РЛУ, ПРВ.
Аппаратура опознавания — НРЗ-12М. Состав:
Система настройки станции на эквивалент (СНСЭ). Состав:
Система перестройки станции обеспечивает защиту станции от активных радиопомех прицельного типа методом смены частоты. Автоматические устройства, автоматы обеспечивают установку любых заранее выбранных фиксированных частот в диапазоне станции и переход с одной фиксированной частоты на другую. Время перестройки станции—не более 8 с. Во время перестройки излучения электромагнитной энергии в пространство не происходит. Состав:
Система электропитания: Состав:
Система отопления и вентиляции: Состав:
Система телефонной и громкоговорящей связи: Состав:
Контрольно-измерительная аппаратура: Состав:
Большая часть блоков аппаратуры конструктивно размещена в шкафах. 10.Тракт зондирующих импульсов Напряжение питания (рис. 1.5) с блока распределения питания и защиты (блок 34) поступает на высоковольтный выпрямитель (блок 35), и током выпрямителя через зарядные диоды (блок 104) заряжается накопитель модулятора (блок 47). С приходом с хронизатора (блок 16) импульса запуска в модуляторе формируется мощный видеоимпульс, который используется для анодной модуляции лампы генератора СВЧ (блок 50). Мощный высокочастотный импульс через антенный коммутатор (блок 3), индикатор напряжения (блок 42), линейный фидер, токосъемник (блок 2), делитель мощности (блок 4) поступает в антенну (блок 1) и в виде электромагнитных волн излучается в пространство в соответствии с диаграммой направленности антенны. Хронизатор вырабатывает импульс с запуска на модулятор, формирователи масштабных отметок (блоки 17 и 18), на ИКО, индикатор контроля, запросчик, аппаратуру сопряжения, в канал передачи сигналов на ВИКО (блок 19). Для аппаратуры СПЦ, блока настройки (блок 90) и накала АПЧ в приемнике импульс запуска формируется в модуляторе при формировании модулирующего импульса для генератора СВЧ. Режимы работы хронизатора: «ВНЕШ.», «ВНУТР.», «СИМ.», «НЕСИМ.», а также режимы «МЕРЦАНИЕ» при защите от СНР задаются с аппаратного пульта управления (блок 12). 11.Тракт приема отраженных сигналов Отраженные от целей эхо-сигналы принимаются антенной и в виде высокочастотных импульсов проходят в обратном направлении от антенны до антенного коммутатора и с него поступают на .широкополосный усилитель высокой частоты (блок 6). После усиления в блоке 6 эхо-сигналы поступают в приемник (блок 5), в канал сигнала, где после усиления по высокой частоте преобразуются в сигналы промежуточной частоты и затем в видеоимпульсы. Видеоимпульсы с выхода приемника поступают: на коммутатор сигнал усилителя ЧПК (блок 27) - ЭХО АМПЛ.; на индикатор контроля (блок 56); на аппаратуру опознавания (для режима «КЛАПАН»). Кроме того, с приемника эхо-сигналы на промежуточной частоте поступают в аппаратуру СПЦ (блок 76) и в зависимости от режима ее работы (задается с блока 12) вырабатываются сигналы ЭХО – КОГЕР. Эти сигналы также поступают на коммутатор сигналов блока 27. С выхода коммутатора сигналов эхо-сигналы (АЛ1ПЛ. или КОГЕР.) поступают в канал объединения эхо-сигналов блока эхо-сигналов (блок 19), смешиваются там с эхо-сигналами сопрягаемых изделий и уже замешанные эхо-сигналы поступают на ИКО (через блок 25) и на аппаратуру РЛУ (через блок 20). С началом каждого цикла работы станции в блоках 17 и 18 вырабатываются соответственно масштабные отметки азимута и дальности, которые через блок 25 поступают на ИКО, через блок 20 – на аппаратуру РЛУ, а также в канал передачи сигналов блока 19. В этот же канал поступают также сигнал СТРОБ. ВИЗИРА с блока 18, импульс запуска с блока 16 и ответный сигнал опознавания с аппаратуры НРЗ. Ко всем этим сигналам добавляются эхо-сигналы из канала объединения эхо-сигналов, все эти видеосигналы поступают на ВИКО. Масштабные отметки дальности поступают также на индикатор контроля (блок 56) и на сопрягаемые изделия. С калибратора (блок 18) сигналы СТРОБ. ВИЗИРА через канал передачи сигналов блока 19 поступают на ВИКО и используются при формировании визирной развертки. Опознавание целей Антенна запросчика 1Л22 вращается синхронно и синфазно с антенной станции. С хронизатора на запросчик поступают импульсы запуска. При включении на АПУ или ВПУ (блок 11 или 22) кнопки запроса срабатывает передатчик запросчика и происходит опознавание цели. Ответный сигнал после декодирования поступает на индикаторы. С приемника (блок 5) на аппаратуру опознавания поступают видеоимпульсы эхо-сигналов для работы в режиме «КЛАПАН». 12.Работа трактов вращения, АПЧ, перестройки по функциональной схеме. Вращение антенны РЛС Вращение антенны осуществляется электродвигателем привода вращения антенны (блок 31), который размещается в верхней части мачтового устройства. Скорость вращения задается с аппаратного пульта управления (блок 11) ручкой СКОРОСТЬ при плавном или кнопками - при дискретном изменении скорости вращения антенны. В обоих случаях в блоке коммутации СВА (блок 32) возникает управляющее напряжение, которое усиливается по мощности электромашинным усилителем (блок 41) и подается в качестве управляющего напряжения на электродвигатель блока 31. В зависимости от выбранного режима вращения изменяются величина и знак этого напряжения, что в конечном счете определяет скорость и направление вращения антенны. Скорость вращения антенны, а также стабильность скорости вращения контролируется с помощью прибора блока 32. Напряжение вращения на сопрягаемые изделия поступает с блока сельсинов-приемников (блок 29). С помощью этого же блока, а также блоков 91, 92 и 94 обеспечивается вращение антенны станции в режиме «СЛЕЖЕНИЕ». С блока сельсинов-датчиков (блок 28) напряжение синхронной передачи угла поворота антенны поступает на: систему ССП запросчика для синхронного и синфазного вращения антенны запросчика с антенной станции; блоки горизонтальной и вертикальной разверток (блоки 7 и 8) для формирования радиально-круговой развертки на ИКО и ВИКО; формирователь отметок азимута (блок 17) для формирования отметок азимута и отметки СЕВЕР; аппаратный пульт управления (блок 12), в схемы управления мерцанием излучения и аппаратуры СПЦ. Автоматическая подстройка частоты (АПЧ) |