Шпора по ТП, почти все вопросы (РЛС П-18), 1ый семестр. 1 Техническая подготовка Физические явления, положенные в основу радиолокации
 Скачать 25.01 Mb. Скачать 25.01 Mb.
|

|
В состав хронизирующего устройства входят следующие блоки:
Все три блока расположены в ИК0, в шкафу 2. Хронизатор (Блок 16). Назначение и режимы работы. Хронизатор обеспечивает согласованную во времени работу аппаратуры станции, формирование импульсов запуска для аппаратуры опознавания, а также режимы защиты от СНР. Возможна работа хронизатора в режимах внутренней и внешней синхронизации. Режимы внутренней синхронизации применяются при автономном использовании станции:
В обоих режимах возможно снятие запуска с модулятора и изменение фазы запускающих импульсов при защите от самонаводящихся ракет (далее – СНР). Режимы внутренней синхронизации, а также режимы защиты от СНР задаются с пультов управления АПУ (блок 12) или ВПУ (блок 23). Режимы внешней синхронизации применяются при использовании импульсов запуска от другой РЛС, РЛУ или комплекса ЗРВ:
Переключение режимов внешней синхронизации осуществляетcя переключателем РЕЖИМ ВНЕШН. СИНХР. 123 на передней панели блока 16. Частота внешних запускающих импульсов не должна превышать 375 Гц. В режимах внешней синхронизации хронизатор обеспечивает работу только в режиме симметричного запуска и не обеспечивает работу в режимах изменения фазы запускающих импульсов. Назначение, боевые возможности и состав системы сопряжения. Система сопряжения предназначена для сопряжения РЛС П-18 с другими станциями, радиовысотомерами и АСУ. Система позволяет сопрягать РЛС П-18 практически со всеми станциями и АСУ. Это является большим достоинством по сравнению с другими РЛС. Цель сопряжения с РЛС - улучшить боевые возможности путем наращивания зоны обнаружения сопрягаемой РЛС. Цель сопряжения с радиовысотомерами - получение всех трех координат на одном рабочем месте (на ВИКО П-18), а также возможность получения совмещенной обстановки на индикаторах станции от РЛС П-18 и высотомера. Целеуказание на сопрягаемый высотомер значительно уменьшает время определения высоты цели. Цель сопряжения с АСУ - непосредственный ввод данных о воздушной обстановке в аппаратуру объектов АСУ. Система сопряжения обеспечивает сопряжение РЛС П-18:
В состав системы сопряжения входят:
Аппаратура сопряжения с РЛУ позволяет производить сопряжение РЛС П-18 с другими РЛС и АСУ (РЛУ). Состав аппаратуры сопряжения с РЛУ (рис. 2.1):
Кроме того, в работе системы сопряжения принимают участие блоки, входящие в другие системы и устройства:
Аппаратура сопряжения с высотомерами позволяет производить сопряжение РЛС П-18 с высотомерами. С помощью этой аппаратуры производится целеуказание по азимуту и дальности на сопрягаемый высотомер, а также отображение на ВИКО измеренной высоты, передаваемой с высотомера. Состав аппаратуры сопряжения с высотомерами:
32.Работа по функциональной схеме аппаратуры синхронизации и сопряжения. В режимах 1 и 2 импульсы внешнего запуска поступают на блок 16 по таким цепям (рис.1);
При сопряжении с РЛС П-19 в блоке 16 формируются сигналы-признаки этого сопряженияСИГН. СВ и ВКЛ. ЗАП. ЧАСТ., которые поступают в блок 19. На основании СИГН. СВ в блоке 19 вырабатывается команда на включение в канал эхо-сигналов информации от П-19МН. Признак ВКЛ. ЗАП. ЧАСТ. используется для снятия с ИКО повторной информации от П-19 на дальности, превышающей 200 км. Вырабатываемые хронизатором синхронизирующие импульсы имеют определенную временную расстановку (рис.1.4.) и поступают на следующие блоки и устройства (рис.1.3.);
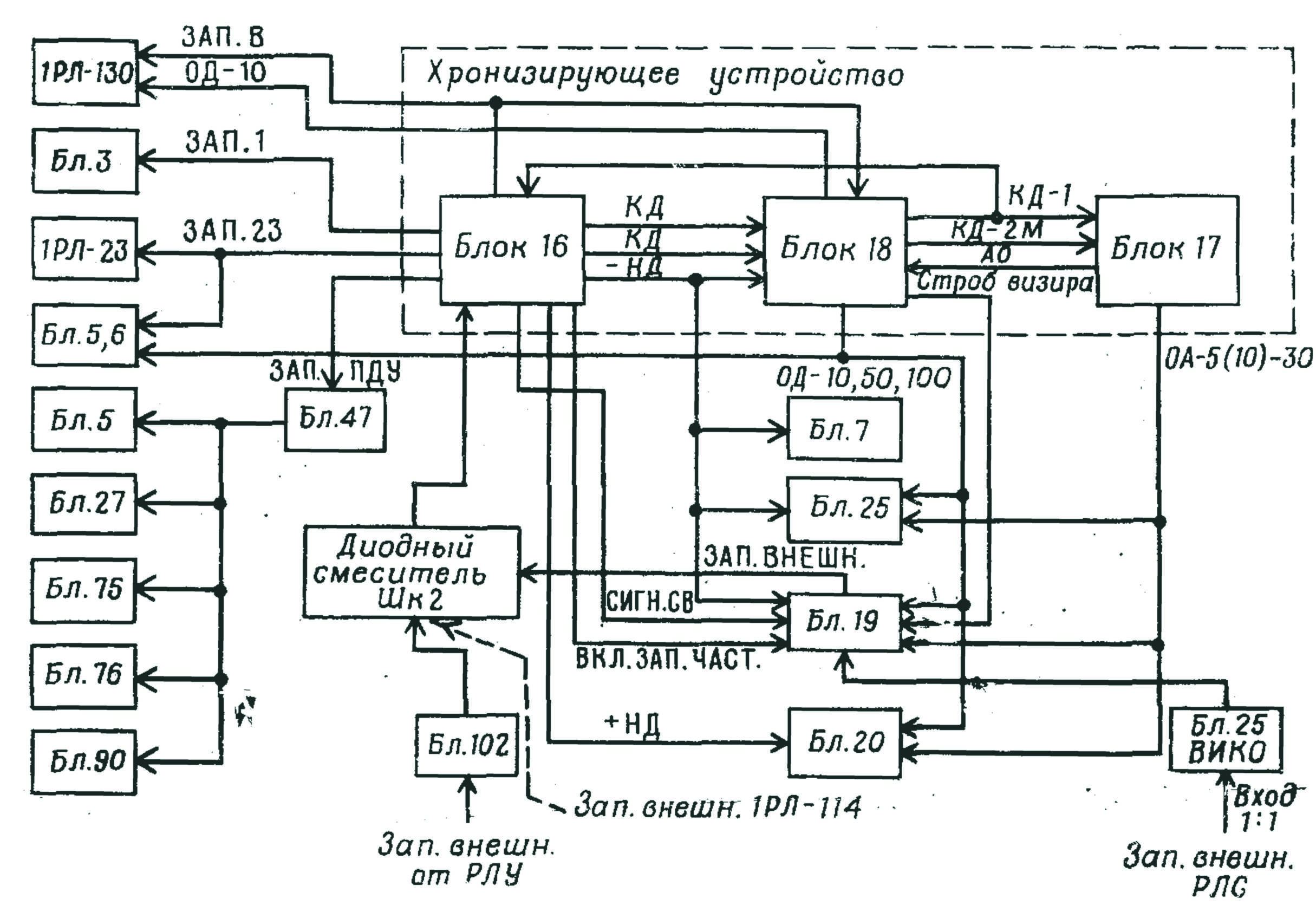 Рис. 1.3. Структурная схема хронизации. 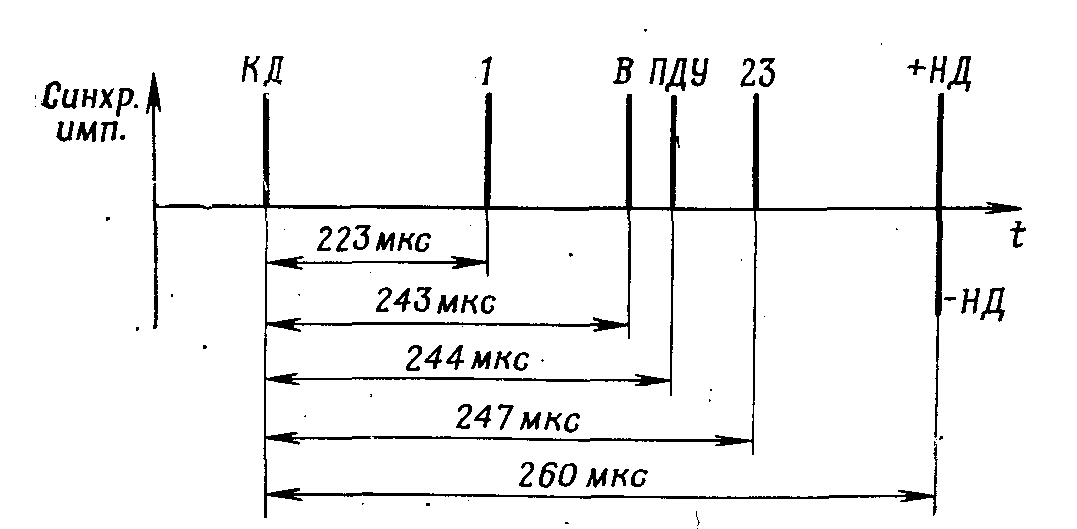 Рис. 1.4. Временная расстановка синхронизирующих импульсов. запуск запросчика НРЗ-12МН (ЗАП. 23) на запросчик НРЗ-12МН и контрольный индикатор (блок 56); импульсы начала дистанции НД (отрицательной полярности) на калибратор, блок горизонтальной развертки (блок7), блок эхо-сигналов (блок19) и на блок сигналов изображения (блок 25); импульсы начала дистанции +НД (положительной полярности) на блок сопряжения (блок 20). 33.Назначение, состав, технические характеристики и режимы работы СВНА. Система вращения и наклона антенны (далее - СВНА) предназначена для вращения антенны в горизонтальной плоскости и наклона стрел антенны в вертикальной плоскости. Система вращения антенны (далее - СВА) имеет следующие режимы работы: Автономная работа СВА в режиме кругового вращения со скоростями 2±0,2 об/мин, 4±0,2 об/мин, 6±0,3 об/мин и стабильностью скорости вращения ±5%. Данный режим применяется для поиска и обнаружения целей. Скорость 4 об/мин является основной скоростью вращения антенны и используется при поиске и обнаружении целей на всех высотах. Скорость 6 об/мин применяется при поиске и обнаружении маловысотных целей. Скорость 2 об/мин применяется при поиске высотных целей, а при обнаружении включается скорость 6 об/мин. В автономном режиме кругового вращения РЛС П-18 может быть использована в качестве ведущей РЛС для других станций и высотомера ПРВ-13. Автономная работа СВА в режиме плавного изменения скорости от 0,3 до 6 об/мин с реверсированием направления вращения. Кроме того, в этом режиме можно включить замедленную скорость от 0 до 3 об/мин для снятия диаграммы направленности антенны в вертикальной плоскости по радиоизлучению солнца. Режим плавного изменения скорости применяется для настройки схемы компенсации ветра аппаратуры СПЦ, поиска целей в секторе, уточнения характеристик целей, а также может быть использован для поиска и обнаружения целей. Работа СВА в режиме слежения за антенной сопрягаемой РЛС. В этом режиме антенна РЛС П-18 повторяет вращение ведущей РЛС. Данный режим применяется при сопряжении с другими РЛС для совмещения воздушной обстановки на экране индикатора от сопрягаемых станций и оперативного подключения одной из сопрягаемых РЛС к АСУ. СВА обеспечивает вращение антенны при следующих ветровых нагрузках и гололеде:
Система наклона антенны служит для наклона антенны в вертикальной плоскости в диапазоне углов от – 5 до +15°. Состав СВНА (рис. 1.1): Силовой привод. Обеспечивает автономную работу СВА в режимах кругового вращения и плавного изменения скорости и включает:
С приводом вращения (блок 31) механически связаны и конструктивно размещены на нем блок сельсинов-приемников (блок 29) и блок сельсинов-датчиков (блок 28). С блока сельсинов-приемников в этих режимах выдаются напряжения синхронизации по вращению на сопрягаемые ведомые изделия. Блок сельсинов-датчиков обеспечивает передачу напряжения, пропорционального углу поворота антенны на устройства станции. Кроме того, в приводе вращения конструктивно размещен электродвигатель наклона антенны. Аппаратура, обеспечивающая режим слежения станции за антенной ведущей РЛС. В состав аппаратуры входят:
34.Система государственного РЛО «Пароль». Назначение, задачи и режимы работы. Взаимодействие НРЗ и СРО в системе «Пароль». Назначение и задачи системы. Единая система государственного радиолокационного опознавания предназначена для определения государственной принадлежности воздушных, морских и наземных объектов, наблюдаемых с помощью радиолокационных станций. Опознавание производится в целях разделения всех обнаруживаемых объектов на <свои> и <чужие>. С помощью системы опознавания решаются следующие задачи: - общее опознавание воздушных, морских и наземных объектов, заключающееся в разделении их на <свои> и <чужие>; - индивидуальное опознавание <своих> объектов по принципу <Где ты?>, заключающееся в определении местоположения определенных одиночных объектов или групп объектов; - индивидуальное опознавание <своих> объектов по принципу <Кто ты?>, заключающееся в определении индивидуального номера объекта; - выявление <своих> воздушных и морских объектов, терпящих бедствие, и определение их местоположения; - передача и прием полетной информации, используемой в системе управления воздушным движением; - предотвращение возможности применения оружия <по своим> объектам. Состав системы и линии опознавания. Аппаратура системы государственного опознавания устанавливается на воздушных, морских и наземных объектах Вооруженных Сил РБ и других ведомств. В состав системы опознавания входят запросчики и ответчики. Запросчики сопрягаются с самолетными, корабельными и наземными РЛС. Ответчики устанавливаются на всех объектах, подлежащих опознаванию. В комплект запросчиков и ответчиков входит засекречивающая аппаратура опознавания (ЗАО). Для опознавания объектов используется метод вторичной радиолокации. При необходимости опознавания обнаруженного объекта запросчик излучает специальный кодированный сигнал (<Кто ты?>), на который ответчик должен выдать специальный кодированный ответный сигнал (<Я свой>). По этому сигналу среди всех наблюдаемых объектов выделяются <свои> объекты. Согласно ГОСТ 25048-81 под линиями опознавания понимается совокупность радиоканалов между опознающими и опознаваемыми объектами с условной записью по принадлежности этих объектов <земля - самолет>, <самолет - корабль>, <самолет - самолет> и т. д. Запросчики и ответчики системы государственного опознавания могут работать в разных линиях опознавания. Нужная линия опознавания устанавливается оператором на пульте управления запросчиком. В каждой линии опознавания используется свой запросный код. Благодаря этому уменьшается загрузка ответчиков и уменьшается число внутрисистемных помех. Линия опознавания <земля-самолет> используется наземными запросчиками, сопрягаемыми с наземными РЛС управления авиацией и зенитно-ракетных комплексов. Линия <берег-корабль> используется наземными запросчиками, сопрягаемыми с наземными РЛС береговой охраны. Принцип опознавания объектов. Режимы опознавания. В системе опознавания для передачи и приема запросных и ответных сигналов используются рабочие частоты, отличные от частот радиолокационных станций. Разделение объектов, обнаруженных РЛС на <свои> и <чужие> осуществляется оператором или автоматическим устройством первичной обработки радиолокационных сигналов по наличию ответного сигнала опознавания, жестко привязанного к эхо-сигналу РЛС во времени и пространстве. Привязка ответных сигналов опознавания к эхо-сигналу РЛС во времени осуществляется за счет излучения запросных сигналов запросчиком синхронно с зондирующими сигналами РЛС. Для этого с РЛС на запросчик подаются импульсы запуска (ИЗ). Привязка ответных сигналов к эхо-сигналу РЛС по угловым координатам осуществляется за счет формирования антенной системой запросчика узкой диаграммы направленности, положение которой в пространстве совпадает с положением диаграммы направленности антенны РЛС. Это обеспечивается использованием общих для РЛС и запросчика антенных систем или вращением антенны запросчика синхронно с антенной РЛС с помощью синхронно следящего привода. Импульс запуска, поступающий на запросчик с РЛС, запускает шифратор запросчика, который вырабатывает кодированный запросный сигнал . Кодирование осуществляется по числу и временной расстановке импульсов на базе кода запросного сигнала. Каждой линии опознавания и режиму соответствует свой запросный код. Кодированный запросный сигнал с шифратора поступает на передатчик, который вырабатывает запросные радиоимпульсы на ультравысокой частоте, Сформированный запросный сигнал через антенный переключатель поступает в антенну и излучается ею в направлении опознаваемого объекта. Антенна ответчика является ненаправленной, что необходимо для обеспечения приема запросных сигналов со всех направлений. Принятый антенной ответчика запросный сигнал устанавливается приемником и преобразуется в видеоимпульсы. Видеоимпульсы запросного сигнала с приемника поступают в дешифратор, который декодирует запросный код. Каждому режиму опознавания соответствует свой запросный код, поэтому при декодировании по структуре запросного кода ответчик определяет режим, в котором ведется запрос. Декодированный сигнал запускает шифратор, который вырабатывает шифрованный ответный сигнал. Код ответного сигнала соответствует режиму опознавания, в котором запрашивается ответчик. Кодирование ответного сигнала осуществляется по временной и частотной расстановке импульсов на базе кода. Видеоимпульсы ответного сигнала поступают в передатчик ответчика, который вырабатывает радиоимпульсы ответного сигнала. Ответный сигнал излучается антенной ответчика и принимается антенной запросчика. Усиленный и преобразованным в видеоимпульсы ответный сигнал с приемника поступает в дешифратор запросчика. Дешифратор декодирует частотно-временной код ответного сигнала в соответствии с признаком ответного кода, установленным в данный момент в запросчике. При соответствии ответного кода действующему дешифратор вырабатывает сигнал, который обеспечивает формирование на индикаторе РЛС метки опознавания. Вид метки опознавания на индикаторе зависит от режима опознавания. Благодаря синхронному с РЛС запуску запросчика и пространственному совмещению диаграммы направленности антенн запросчика и РЛС метка опознавания на индикаторе РЛС находится рядом с меткой опознаваемого объекта. По наличию метки опознавания оператор делает заключение, что опознаваемый объект <свой>. Когда объект терпит бедствие, его ответчик включается в режим бедствия. В этом случае, если объект не запрашивается ни одним запросчиком, его ответчик вырабатывает и излучает в пространство специальные кодированные сигналы тревоги с частотой повторения 300-600 Гц. Эти сигналы принимаются и декодируются запросчиком, работающим в дежурном режиме (работает приемо-дешифрирующий тракт), и индицируются на специальном табло. Оператор РЛС, увидев на табло сигнал, <Тревога>, включает запрос. Запрос при этом ведется в режиме общего опознавания. Ответчик, на котором включен режим бедствия, получив запросные сигналы, вместо сигналов тревоги начинает вырабатывать ответные сигналы бедствия, код которых отличается от кода ответных сигналов общего опознавания. После декодирования ответных сигналов бедствия дешифратором запросчика на индикаторе РЛС около метки объекта, выдающего ответные сигналы бедствия, появляется метка опознавания, отличающаяся по своему виду от метки общего опознавания. По этой метке оператор РЛС определяет среди всех <своих> объект, терпящий бедствие, и его координаты. |