Поисковые мероприятия БЛА. Диплом.Ворд. А. В. Сытин Р. Н. Поляков Орёл, 2020 г
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

Динамические уравнения Вектор скорости квадрокоптера в инерциальной системе обозначим v, тогда Второй закон Ньютона примет вид:
 (3.10) dv mn — = F o dt где mo - общая масса устройства, кг; F - вектор суммарной силы, приложенной к нему, Н. При переходе от неподвижной системы координат в подвижную, закон преобразуется следующим образом: (3.11) dv ,dvV . ч mn — = mn (+ w х v) = F„ o dt oy dt в в где ^v - линейное ускорение устройства относительно подвижной системы dt координат; w - угловая скорость вращения подвижной системы относительно инерциальной, рад/с. Управляющая сила вычисляется и прикладывается в подвижной системе координат, соответственно получаем следующее выражение:     V „ х,в vz,5J ™у, в Рвх, в Чу, в qvz, в П', в Pvy,в _ 1 1- — mo (3.12) Второй закон Ньютона при вращательном движении в Земной неподвижной системе принимает следующий вид: (3.13) dL — = M dt где L - угловой момент, кг ■ м2 /с; М - момент вращения силы, Н ■ м. При переходе от неподвижной системы координат в подвижную, закон преобразуется следующим образом: (3.14) dL d L = + w х L = MR dt dt в где L = JwB, a J - тензор инерции.
Примем квадрокоптер в качестве шара с радиусом Rk, и массой Mk. От центра данного шара, на расстоянии l, расположены материальные точки с массой m (рис. 3.3).   Рисунок 3.3 - Схематичное представление квадрокоптера Принимаем квадрокоптер за симметричное тело, тогда тензор инерции будет иметь следующий вид: (3.15) где Jx, Jy, Jz - компоненты тензора, которые находятся по формулам:   J =J 2MR2 2 k-k- + 272 2т 5 (3.16) (3.17) 2MkRk2 2 J = k-k- + 472 т z5 Получаем, что угловые ускорения находятся следующим образом:
(3.19) Представим MBT в виде:
MBT т? *6 Tv _ Тогда окончательно получаем, что угловые ускорения равны: (3.20) Модель для управления Добавим к модели квадрокоптера (формулы 3.7 - 3.9, 3.12, 3.20) выражения, описывающие силы и крутящие моменты, действующие на устройство (рис. 3.4). 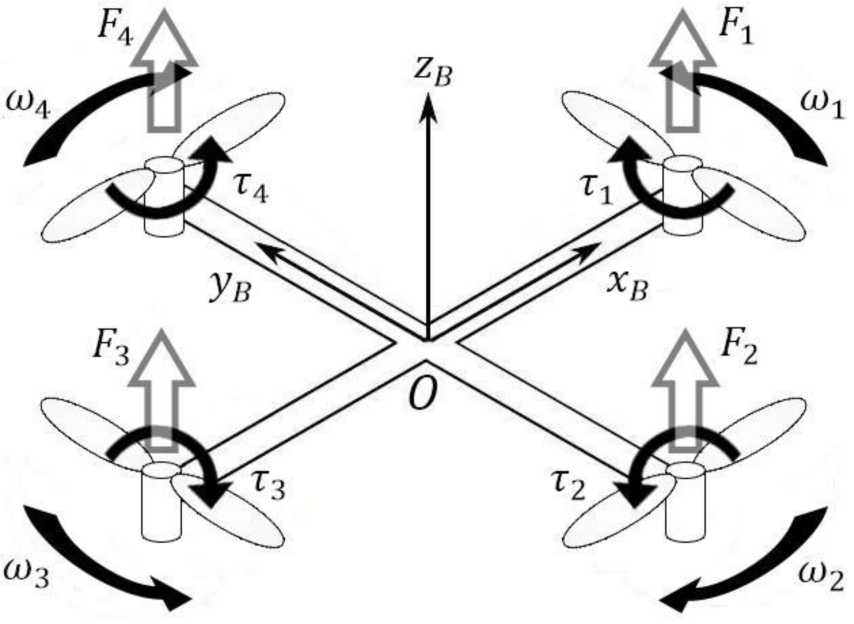 Рисунок 3.4 - Действующие на квадрокоптер силы и крутящие моменты Подъемная сила и крутящие моменты винтов прямо пропорциональны квадрату скорости их вращения [20] и находятся по следующим формулам: F = k (^2 + (2 + о32 + ^2) (3.21)
где mi - скорость вращения i-го винта, рад/с; k, b - постоянные, определяемые экспериментально. На квадрокоптер действует сила тяжести: Fg = (3.25) В подвижной системе координат формула 3.25 примет следующий вид: FgB = mog sine - mog sin <pcosO - mog cos^cosO Подставим полученные выражения в формулу 3.12 и получаем: (3.26)
Считаем, что углы (р и в малы и ими можно пренебречь, тогда формула 3.9 принимает следующий вид: (3.28) Аналогично считаем, что компоненты qr, pr, pq формулы 3.20 малы, тогда получаем:
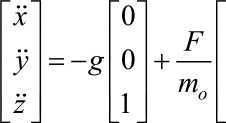 1 ЛТ 1 Гте (3.29) С учетом данного выражения, получаем, что производная 3.28 будет следующей: 1 J,Тф 1 Гте Пренебрегая R продифференцируем формулу 3.7: x у =RVB z (3.30) (3.31) Инерциальная система является неподвижной, тогда формулу 3.27 можно подставить в формулу 3.31, отбросив первое слагаемое: cos ф sin в cos ф + sin ф sin ф sin ф sin в cos ф - cos ф sin ф cospcosO (3.32) К данной системе необходимо дополнить силу аэродинамического сопротивления [6]: F = cd — S a d (3.33) где cd - коэффициент аэродинамической силы; р - плотность воздуха, кг/м3; v - скорость набегающего потока воздуха, м/с;
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||