Поисковые мероприятия БЛА. Диплом.Ворд. А. В. Сытин Р. Н. Поляков Орёл, 2020 г
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
| | | | | |
| | | | | |
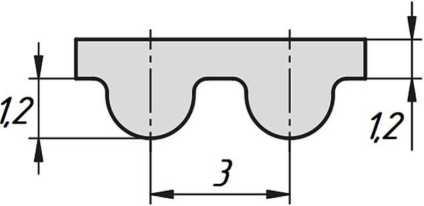
Рисунок 2.11 - Схема строения зубчатого ремня 3M-30
В ременной передаче основная нагрузка приходится на ремень, соответственно существует необходимость выполнить проверочный расчет по эквивалентному напряжению:
а. < [а], (2.5)
где аэкв - действующее эквивалентное напряжение в ремне, МПа;
[а] - максимально допустимое для нормальной работы передачи напряжение, МПа.
Допустимое напряжение для данного вида ремней составляет [а] = 37 МПа. Действующее эквивалентное напряжение можно рассчитать по формуле:
аэкв =а0 +а1 +ац.б. +аи (2.6)
где а0 - напряжение от силы предварительного натяжения, МПа;
а1 - напряжение от рабочей нагрузки, МПа;
ац.б. - напряжение от центробежной нагрузки, МПа;
аи - изгибные напряжения, МПа.
Для зубчатых ремней напряжением от силы предварительного натяжения, напряжением от центробежной нагрузки и изгибным напряжением можно пренебречь. Учитывая вышесказанное условие работоспособности ремня, можно записать в следующем виде:
а < [а] (2.7)
Напряжение от рабочей нагрузки находится по формуле:
F
ai = F, (2.8)
A
| | | | | | ВКР.20.15.04.06.О. 11.00.000 РПЗ | Лист |
| | | | | | 43 | |
| Изм. | Лист | № докум. | Подпись | Дата |
где Ft - рабочая нагрузка, Н;
A - площадь наименьшего сечения ремня (A = a ■ b = 1,2 ■ 30 = 36(мм2)).
Рабочей нагрузкой в нашем случае будет являться вес эвакуационной капсулы совместно с человеком - 1430 Н. Для выдвижения внутренней капсулы будут использоваться два ремня, отсюда следует, что рабочая нагрузка будет равномерно распределена на них и составит по 715 Н на каждый ремень.
715
*1 = — = 19,9 (МПа)
36
19,9 (МПа) < 37 (МПа).
Условие выполняется, следовательно, данный ремень возможно применять в проектируемом устройстве.
Шаговый двигатель
Для обеспечения движения ременной передачи и, соответственно, телескопической направляющей, в конструкции предлагается использовать шаговые электродвигатели (ШД).
Шаговый электродвигатель - синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. При последовательной активации обмоток, шаговый двигатель повернется строго на определенный угол. Главными критериями при выборе шагового двигателя являются крутящий момент, точность
позиционирования и скорость перемещения.
Выбор шагового двигателя по крутящему моменту производят согласно

(2.9)
следующего условия:
расч ном ,
где Трасч — расчетный крутящий момент, Н^м;
Тном - номинальный крутящий момент двигателя, I Ьм.
Расчетный крутящий момент зависит от нагрузки, которая создается внутренней эвакуационной капсулой, при перемещении по направляющим, а также
| | | | | |
| | | | | |
| Изм. | Лист | № докум. | Подпись | Дата |
от механической передачи, с помощью которой осуществляется перемещение. В качестве передачи, осуществляющей движение, была выбрана ременная передача. Тогда расчетный крутящий момент вычисляется по формуле:

(2.10)
d
т = F. _шк
расч ,
где F - максимальная нагрузка, Н;
dMK — диаметр шкива, м.
Максимальная нагрузка равняется весу внутренней эвакуационной капсулы с лежащим внутри человеком - 1430 Н. В конструкции предлагается использовать два шаговых двигателя, для равномерного распределения нагрузки.
0 097
Трасч = 715 • -,^- = 34,7 Н-м
Согласно полученному значению, выбираем шаговый двигатель NEMA 51 FL130BYG2503 (рис. 2.12) с номинальным крутящим моментом T = 5- Н.м. В таблице 7 приведены основные характеристики данного шагового двигателя.


Рисунок 2.12 - Шаговый двигатель NEMA 51 FL130BYG2503
Таблица 7 - Характеристики шагового двигателя NEMA 51 FL130BYG2503
| Параметр | Значение |
| Угловой шаг | 1,8° |
| Ток фазы | 7 А |
| Момент | 50 Н-м |
| Максимальная допустимая радиальная нагрузка на вал | 220 Н |
| Максимальная допустимая осевая нагрузка на вал | 60 Н |
| Диаметр вала | 22 мм |
| | | | | |
| | | | | |
(2.11)
Определим расчетную скорость вращения шагового электродвигателя:
гпЕрмомЕтр 41
w4 49
VB = 52
V „ 54
vz,5J 54
1- — 54
= + w х L = MR 54
J =J 57
z5 57
Гте 59
J,Тф 59
Гте 59
x у =RVB z 59
F = cd — S 59
ВКР.20.1504.06.О. 11.20.005 87
Уголок 87
АМгЗ ГОСТ i78i-9y 87
о результатах проверки текстового документа на наличие заимствований 97
Согласно документации на телескопическую направляющую максимальная скорость перемещения равна 0,3 м/с. Расчетная скорость перемещения данного шагового двигателя значительно превышает максимальную скорость перемещения направляющей, что можно будет отрегулировать драйверами для шаговых двигателей.
2.4 Проверочный расчет болтовых соединений


к беспилотному летательному болтового соединения. Место
нагрузку под действием веса
Присоединение эвакуационной капсулы аппарату будет осуществляться с помощью соединения будет испытывать наибольшую
эвакуационной капсулы с перевозимым в ней человеком. Схема соединения изображена на рисунке 2.13.
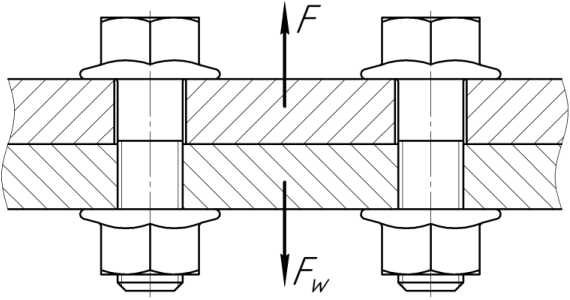

Рисунок 2.13 - Схема соединения эвакуационной капсулы и БПЛА
Болтовое соединение будет осуществляться следующими стандартными изделиями:
Болт ГОСТ 15589-70 - М20х65;
Шайба ISO 7092 - 20-200HV;
Гайка ГОСТ Р 50592-93 - M20-6H.
Исходные данные для расчета:
Осевое усилие на болты: F = 1430Н.
Марка стали болтов: ст35.
Допускаемое напряжение при температуре 30 °С:
на растяжение: [о] = 129,5 МПа;
на срез: [т] = 64,75 МПа.
Номинальный диаметр резьбы болта: D = 20 мм.
Шаг резьбы болта: Р = 2,5 мм.
Диаметр резьбы по впадинам: d3 = 16, 93мм.
Коэффициент полноты резьбы:
болта: K1 = 0,75;
гайки: K1 = 0,875.
Коэффициент деформации витков: Km = 0,6.
Коэффициенты наличия смазки:
z = 0,13; Z1 = 0,26.
Количество болтов: z = 30.
Расчет болтов на прочность
Площадь сечения болта:
1
Aw = - ^d32 (2.12)
A =