Поисковые мероприятия БЛА. Диплом.Ворд. А. В. Сытин Р. Н. Поляков Орёл, 2020 г
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
Способ проведения поисково-спасательных работ [10] Патент: RU 2694528 C1, МПК: A62B 99/00 Авторы: Шерстнев В.В. (RU), Бодин О.Н. (RU), Безбородова О.Е. (RU) и др. Алгоритм оказания пострадавшим медицинской помощи, эвакуации транспортабельных пострадавших приведен на рисунке 1.7.  Рисунок 1.7 - Алгоритм оказания пострадавшим медицинской помощи Способ проведения поисково-спасательных работ, заключающийся в том, что осуществляется:
Ввод в память беспилотного воздушного судна координат границ зоны чрезвычайной ситуации, высоты полета, координат точки начала сканирования, траектории и шага сканирования. Запуск беспилотного воздушного судна. Разведку беспилотным воздушным судном заданной зоны: Обеспечение пострадавших средствами индивидуальной защиты, мобильным телефоном и аптечкой. Возвращение беспилотного воздушного судна, Оказание пострадавшим медицинской помощи манипулятором беспилотного воздушного судна медицинского назначения осуществляется путем: производства рентген-снимков; наложения жгута, повязки, шины; оснащения пострадавших портативным регистратором электрокардиосигналов; проведения дефибрилляции; инъекции лекарственных препаратов; маркировки пострадавших; корректировку очередности оказания медицинской помощи пострадавшим; эвакуацию транспортабельных пострадавших и их жизнеобеспечение беспилотным воздушным судном эвакуационного назначения посредством капсулы реанимации. Техническим результатом изобретения является уменьшение времени на поиск пострадавших, повышение качества оказания ЭМП и, как следствие, уменьшение потерь и осложнений у пострадавших в ходе ЧС. Указанный результат достигается тем, что в способе проведения поисково-спасательных работ сообщение о ЧС поступают в Единую дежурно-диспетчерскую службу по прямым каналам и линиям связи. При классификации сложившейся ситуации как чрезвычайной, Единая дежурно-диспетчерская служба населенного пункта поручает проведение работ в зоне ЧС соответствующим службам, и они выдвигаются в зону ЧС.
Переносной и транспортируемый изолируемый роботизированный эвакуационный медицинский модуль [11] Патент RU 2658466; МПК: A61B 5/04 Авторы: Садовничий В.А. (RU), Соколов М.Э. (RU), Подольский В.Е. (RU), и др. На рисунке 1.8 показаны схемы взаимодействия диагностического оборудования и лечебного оборудования с пациентом. 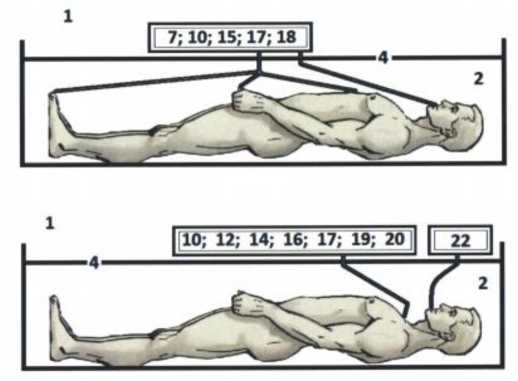           Рисунок 1.8 - Переносной и транспортируемый изолируемый роботизированный эвакуационный медицинский модуль Медицинский модуль состоит из энцефалографа 7; компьютерной системы обработки информации 10; аккумуляторной батареи 12; отсоса 14; диагностического медикаментов для ультразвукового монитора инфузий аппарата 15; 16; 17; инфузионного насоса 19; инфузомата 20; аппарата искусственной вентиляции легких 22. Указанная аппаратура соединена    пациентом, отверстий с с комплексом трубопроводами с находящимися во втором блоке, через одно или несколько возможностью их полной изоляции. В первом блоке также расположена компьютерная система видеонаблюдения за пациентом и аудиообщением, комплексом поддержки принятия диагностических и лечебных решений, возможностью дистанционной передачи визуальной и телеметрической информации. Указанная аппаратура соединена с датчиками, находящимися во втором блоке. Способ проведения поисково-спасательных работ [12] Патент RU 2698893; МПК: A62B 99/00, B64C 39/02 Авторы: Борисов Е.Г. (RU), Талан А.С. (RU), Типикина К.С. (RU), Киртянова О.Н. (RU) 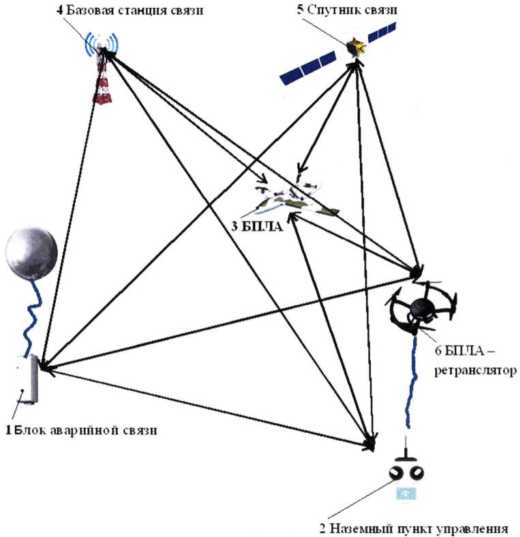 На рисунке 1.9 показана организация системы связи объекта поиска с БПЛА и наземным пунктом управления (НПУ), которая содержит блок аварийной связи 1; наземный пункт управления 2; поисковый беспилотный летательный аппарат 3; базовая станция сотовой связи 4; спутник связи 5; грузовой поисковый беспилотный летательный аппарат 6. На рисунке 1.9 показана организация системы связи объекта поиска с БПЛА и наземным пунктом управления (НПУ), которая содержит блок аварийной связи 1; наземный пункт управления 2; поисковый беспилотный летательный аппарат 3; базовая станция сотовой связи 4; спутник связи 5; грузовой поисковый беспилотный летательный аппарат 6.Проведение поисково спасательной операции начинают с анализа данных, поступающих с блока аварийной связи (БАС) 1 который состоит из модуля аварийной связи и Рисунок 1.9 - Способ проведения надувного поискового ориентира, поисково-спасательных работ „ „ причем модуль аварийной связи содержит измеритель пульса, измеритель температуры и давления и блок акселерометров, «тревожную кнопку» и систему голосового сообщения. При возможности, объект поиска инициирует включение надувного поискового ориентира и служит дополнительным ориентиром для поиска с БПЛА 3 и БПЛА 6. Координаты объекта поиска через заданный интервал времени передают в эфир и принимают аппаратурой связи. Изобретение относится к способам проведения поисково-спасательных работ с помощью беспилотных авиационных систем. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки и способ управления им [13] Патент RU 2706765; МПК: B64C 27/08, B64C 39/02 Авторы: Галимов М.М. (RU), Афанасьев И.М. (RU), Данилов И.Ю. (RU), Липатов А.Н. (RU) 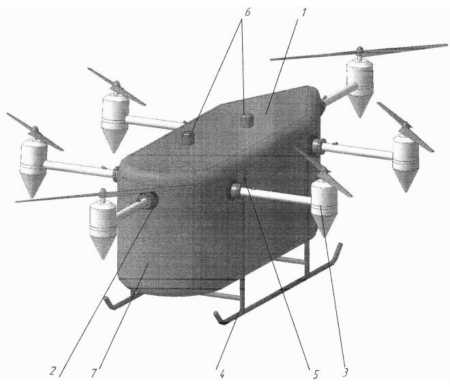  Рисунок 1.10 - Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки и способ управления им На рисунке 1.10 изображен общий вид модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки, который содержит корпус 1, более двух легкоразъемных узлов 2 для соединения консолей 3, опоры 4, которые соединены с корпусом 1 через тензометрический датчик веса 5. Также на корпусе 1 установлены датчик 6 для определения местоположения осей воздушных винтов 11 консолей 3. Снизу к корпусу 1 прикреплен на легкоразъемном соединении грузовой контейнер 7. В зависимости от мощности, эксплуатационных или иных требований консоли 2 могут содержать один или несколько электрических, или бензиновых двигателей с соответствующими средствами управления и обеспечения работой двигателей, а также содержать средства управления тягой в виде устройства наклона двигателя, рулей отклонения струи и т.п., а также средства управления ими. Цель изобретения достижение наиболее экономичных режимов доставки грузов путем оптимизации параметров аппарата к условиям каждого полета за счет сборки конфигурации под заданные требования конкретного полета. Транспортировка и подъем нестандартных и негабаритных грузов. Система удалённого наблюдения и управления беспилотными летательными аппаратами [14] Патент RU 2657164; МПК: G08G 5/00, G05D 1/00, B64C 39/00 Авторы: Разроев Э.А.О. (RU), Спинко В.Е. (RU) На рисунке 1.11 приведена обобщенная схема прохождения беспилотного летательного аппарата (БПЛА) через зоны ответственности станций организации и 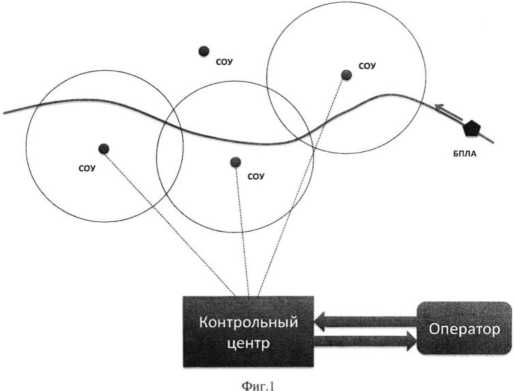  Рисунок 1.11 - Система удалённого наблюдения и управления беспилотными летательными аппаратами управления (СОУ). Каждая СОУ сети включает в себя, по меньшей мере, одну камеру кругового обзора, по меньшей мере, один радиочастотный приемопередатчик, систему обработки и передачи информации, блок стационарного питания, предназначенный для подключения СОУ к сети электроснабжения, блок альтернативного питания; по меньшей мере один контрольный центр (КЦ), выполненный с возможностью сбора информации о БПЛА и выработки команд управления БПЛА, при этом КЦ включает в себя систему обработки видеосигнала, по меньшей мере один монитор, автоматизированное рабочее место оператора (АРМ), по меньшей мере один радиочастотный приемопередатчик, блок стационарного питания, предназначенный для подключения КЦ к сети электроснабжения. Сеть СОУ размещена на местности по сотовому принципу, таким образом, чтобы любая точка пространства на высоте не более 200 метров от уровня поверхности находилась в зоне видимости, по меньшей мере, одной камеры кругового обзора СОУ. Техническое решение относится к области использования беспилотных летательных аппаратов (БПЛА), в частности к системам удаленного наблюдения и управления БПЛА. Passenger carrying unmanned aerial vehicle powered by a hybrid generator system [15] (Пассажирский беспилотный летательный аппарат, работающий на гибридной генераторной системе) Патент US 2019/0283874; МПК: B64C 39/02, B64D 27/24 Авторы: Long N. Phan (US), Samir Nayfeh (US), Eli M. Davis (US) 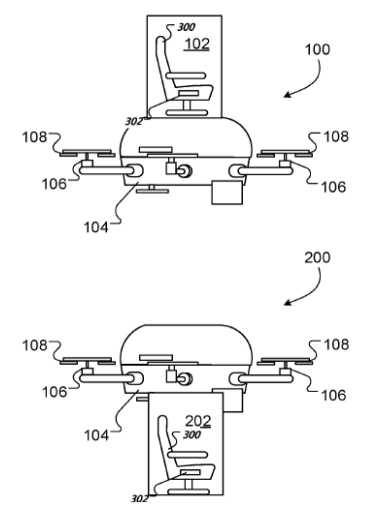  Рисунок 1.12 - Passenger carrying unmanned aerial vehicle powered by a hybrid generator system На рисунке 1.12 показаны схемы пассажирских беспилотников. летательный аппарат 100, 200 для перевозки пассажиров включает в себя пассажирское отделение 102, 202, гибридную систему генератора, которая включает в себя множество роторов 106, каждый из которых соединен с гребным винтом 108. Пропеллеры 108 создают достаточную подъемную силу, чтобы перевозить беспилотный летательный аппарат 100, 200 и пассажирское отделение 102, 202 с пассажиром. В некоторых случаях пассажирское отделение 102, 202 могут быть рассчитаны на перевозку нескольких пассажиров (два и более). Для перевозки большего количества пассажиров гибридный генератор может включать в себя более крупные двигатели и пропеллеры, большее количество роторов и пропеллеров, может включать двигатель, сконфигурированный для выработки большего количества мощности. Пассажирский беспилотный летательный аппарат приводится в действие гибридной генераторной системой, размер которой достаточен для подъема пассажира и его личных вещей. Гибридная генераторная система для питания беспилотных летательных аппаратов может быть сконструирована с резервированием для обеспечения безопасности пассажиров. Human life rescue device [16] (Устройство спасения жизни человека) Патент JP 2017/210078; МПК: B64C 39/02, B64C 13/20, B64C 27/08, B64D 47/08, B64D 1/22 Авторы: Yuichiro Niizaki (JP), Yunito Niizaki (JP) 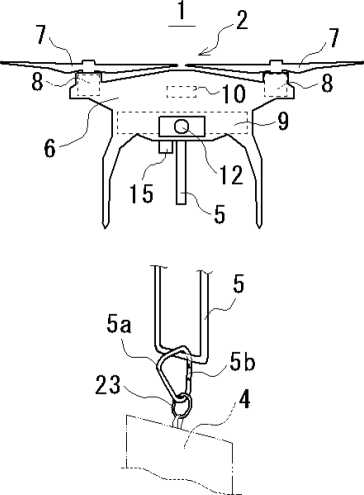  Рисунок 1.13 - Human life rescue device На рисунке 1.13 показано спасательное устройство 1, которое включает в себя беспилотный летательный аппарат 2, спасательные средства 4, и средство 5 блокировки спасательных средств. Беспилотный летательный аппарат 2 управляет корпусом 6, множеством роторов 7, электродвигателем 8, который приводит в движение лопасти 7 ротора, аккумулятором 9, который подает питание каждому блоку. Устройство 10 управления управляет каждой частью планера, чтобы выполнять дистанционное управление и автоматическое пилотирование, и включает в себя устройство GPS и устройство связи для получения информации о местоположении (включая информацию о высоте). Камера 12 захватывает переднее и нижнее изображения тела 6, и снятые изображения отображаются в реальном времени на экране монитора устройства управления. Оператор может управлять беспилотным летательным аппаратом 2 с помощью пульта дистанционного управления, просматривая захваченное изображение, координаты GPS-положения и т.п. Тепловой детектор 15 обнаруживает тепло (инфракрасные лучи) человека.
|