Поисковые мероприятия БЛА. Диплом.Ворд. А. В. Сытин Р. Н. Поляков Орёл, 2020 г
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
Unmanned aircraft, rescue system and rescue method [17] (Беспилотный летательный аппарат, спасательная система и способ спасения) Патент JP 2017213951; МПК: B64C 39/02, B64C 13/18, B64C 25/58 Авторы: Yusuke Sekine (JP), Shinya Sano (JP), Chisato Iwakiri (JP), Ryota Yamane (JP) 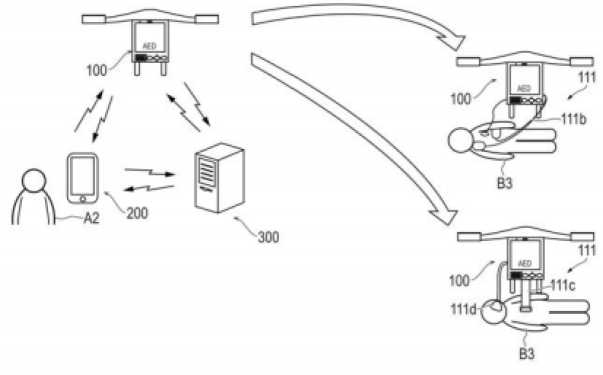 На рисунке 1.14 показана схема работы беспилотного летательного аппарата для спасения. Когда беспилотный летательный аппарат 100 принимает сигнал, то переключается из нормального режима в аварийный режим и получает ввод операции спасения, назначенной пользователем A2, через информационное устройство 200. После перемещается к месту бедствия и выполняет спасательную операцию для жертвы бедствия B3. На рисунке 1.14 показана схема работы беспилотного летательного аппарата для спасения. Когда беспилотный летательный аппарат 100 принимает сигнал, то переключается из нормального режима в аварийный режим и получает ввод операции спасения, назначенной пользователем A2, через информационное устройство 200. После перемещается к месту бедствия и выполняет спасательную операцию для жертвы бедствия B3. Информационное терминальное Рисунок 1.14 - Unmanned aircraft, rescue system and rescue method устройство 200 может быть, например, портативным терминальным устройством (смартфон, портативное устройство связи, которое не имеет функции вызова и т. д.) Сервер 300 управления представляет собой серверное устройство, которое управляет всей системой и выполняет управление беспилотным летательным аппаратом 100, управление сбором данных и т.п. Передача/прием данных между беспилотным летательным аппаратом 100 и сервером 300 управления и передача/прием данных между терминальным устройством 200 информации и сервером 300 управления выполняются через предварительно определенное ретрансляционное устройство (модем, адаптер терминала, шлюзовое устройство и т. д.). A kind of high-rise fire rescues search unmanned plane temporarily [18] (Поисково-спасательный беспилотный летательный аппарат для спасения из пожара) Патент CN 108216606; МПК: B64C 27/08, B64D 47/00, B64D 47/08 Авторы: Wang Zhicheng (CN)   Рисунок 1.15 - A kind of high-rise fire rescues search unmanned plane temporarily На рисунке 1.15 изображена общая структурная схема поисковоспасательного беспилотного летательного аппарата, которой показаны корпус 1, летное крыло 2, корпус ящика для хранения 3, инфракрасная камера 4, прибор для обнаружения жизни 5, двигатель 6, внешний слой 7, внутренний слой 8, пенопласт 9. Корпус ящика для хранения 3 имеет двухслойную структуру. Внешний слой двухслойной структуры выполнен из теплоизоляционного алюминиевого сплава. Изобретение включает литиевую батарею, гироскоп, инфракрасную камеру, микрокомпьютер, сигналы для приема передатчика и обнаружения жизни. Настоящее изобретение может быстро удовлетворить насущную потребность в спасательных средствах на высотных высотах, и здание, которое быстро загорается, достигается под воздействием пожарного. 2 Проектно-конструкторский раздел После анализа статей, патентов и готовых существующих решений по тематике выпускной квалификационной работы, была разработана 3D-модель беспилотного летательного аппарата (БПЛА) для эвакуации пострадавших, показывающая примерную компоновку элементов проектируемого устройства. БПЛА для эвакуации, согласно техническому заданию, должен удовлетворять следующим требованиям:
Структурно-функциональная схема устройства представлена на рисунке 2.1. 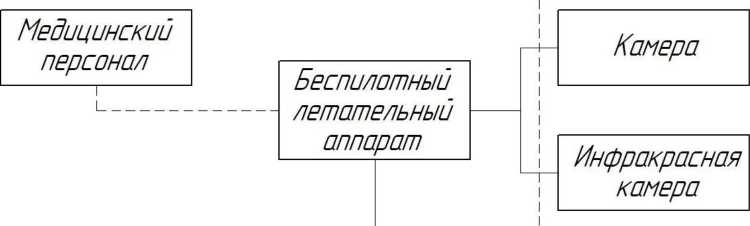  Технеческое 3PEHUE  Измеренье пульса гпЕрмомЕтр Рисунок 2.1 - Структурно-функциональная схема БПЛА для эвакуации Во время перевозки в эвакуационной капсуле у пострадавшего, с помощью специальных датчиков, будет произведено измерение температуры, пульса и давления. После обработки показаний программой будет принято решение о применении необходимых медикаментов. Полученные показания также будут направлены медицинскому персоналу для подготовки специализированной техники и препаратов. Также в эвакуационной капсуле присутствует система подачи кислорода [2].
Принцип движения мультикоптера: При движении стика газа вверх на аппаратуре управления, мультикоптер просто прибавляет обороты на всех двигателях, тем самым набирая высоту. Для полетов в сторону, аппарат кренится в нужную сторону, увеличивая обороты двигателей с одной стороны и снижая с другой. За счет датчиков, соединенных с полётным контроллером (ПК), аппарат кренится только до ограниченного угла, чтобы не перевернуться. Для движения вперед и назад используется тот же принцип. Материал рамы Как уже упоминалось выше, существует возможность применения композиционных материалов. В нашем случае проектируется грузовой беспилотный летательный аппарат для перевозки людей: масса около 100 кг, рост (длина) около 2 метров. Поэтому для создания такого большого мультикоптера было принято решение использовать сплавы алюминия (авиаль) с включением магния, кремния, меди и марганца и отличающихся повышенной прочностью. На рисунке 2.2 представлен общий вид БПЛА для эвакуации людей.
Беспилотный летатальный аппарат  Эвакуационная капсула Рисунок 2.2 - Общий вид беспилотного летательного аппарата для эвакуации людей из труднодоступных мест Моторы, регулятор оборотов и пропеллеры Для выбора моторов необходимо знать вес мультикоптера и размеры рамы. Согласно заданию, грузоподъемность БПЛА для эвакуации людей должна составлять не менее 2000 Н. Произведем уточнение общей массы устройства: Mоб = M мк + M чел (2.1) где Mмк - масса мультикоптера, кг; M чел - максимальная масса перевозимого человека, кг. M =197+100=297 кг Для обеспечения запаса по мощности, примем M = 330 кг, что составляет 3300 Н. Проектируемое устройство является квадрокоптером, тогда необходимо, чтобы в сумме все четыре мотора могли обеспечить тягу 340 кг. Для этого у каждого мотора тяга должна составлять минимум 85 кг. В настоящее время моторы с данной тягой нет возможности найти, поэтому предлагается первоначально выбрать двигатель Hacker A200-8 kv110 (рис. 2.3). Характеристики данного мотора представлены в таблице 5.
 Рисунок 2.3 - Двигатель Hacker A200-8 kv110 Таблица 5 - Характеристики мотора Hacker A200-8 kv110
Согласно рекомендации, выбираем регулятор оборотов MasterSpin 220 Pro OPTO (рис. 2.4), технические характеристики которого представлены в таблице 6.  Рисунок 2.4 - Регулятор MasterSpin 220 Pro OPTO
|