Курсовой проект [вариант 1] (третья версия). Адаптивная система управления
 Скачать 1.22 Mb. Скачать 1.22 Mb.
|

 Министерство образования Российской Федерации УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра АТС Курсовая работа по дисциплине «Интегрированные системы проектирования и управления» На тему: «Адаптивная система управления» Выполнил: гр. АУ-426 Проверил: Лютов А. Г. Уфа-2006СодержаниеЗадание………………………………………………………………….……….3
При фрезеровании заготовки погрешность обработки вызвана упругими деформациями системы СПИД и зависит от колебаний составляющей силы резания РХ. Колебание силы РХ обусловлено изменением величины снимаемого припуска tП. Уменьшения погрешности в машиностроении позволяют как снизить экономические затраты на производство деталей, так и уменьшить время на производство. В данной курсовой работе производится синтез АдСУ на основе разработанной ранее САР, позволяющей стабилизировать погрешность обработки с заданной точностью, при изменении tп в заданных пределах. Хотя САР позволяет уменьшенить погрешность производимой детали, при существенном изменении параметров процесса резания такая система не способно адекватно работать. Возникает задача синтеза системы , которая адаптируется к изменениям параметров процессов резания.
Схема процесса: 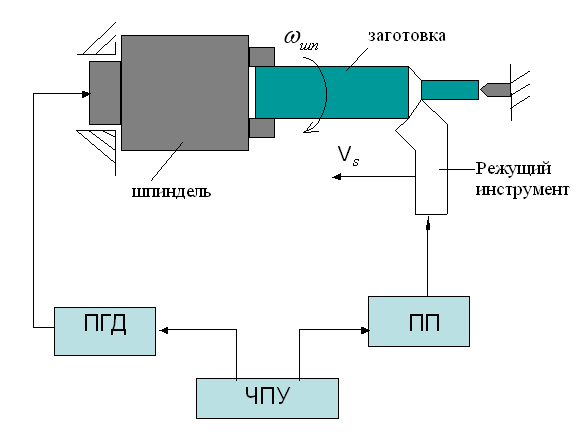 , ,Рис.1. ППД – привод главного движения, ПП – привод подачи. Произведем анализ процесса резания как объекта управления. Анализ будем производить в несколько этапов: Произведем анализ процесса резания как объекта управления. Анализ будем производить в несколько этапов:
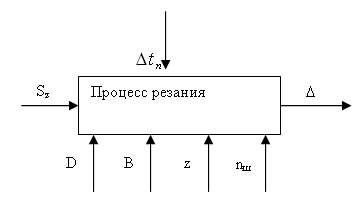 Рис.2. Процесс резания как ОУ А формула (2) перепишется следующим образом:  ; ;
Так как реальное отклонение выходной координаты больше допустимого, то нам придется регулировать выходную координату, т. е. нам необходимо проектировать систему автоматического регулирования Px .
Схема взаимодействия электропривода и процесса резания приведена на рис. 1: 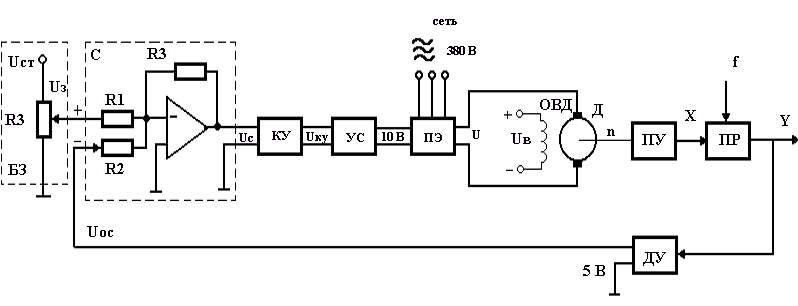 Рис.3.Схема взаимодействия электропривода и процесса резания САР регулирует выходную координату процесса резания с заданной точностью. Процесс резания на схеме обозначен функциональным блоком ПР, управляющая координата ПР обозначена Х, возмущающее воздействие f. Передаточное устройство – это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процессом резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени Преобразователь электрической энергии (ПЭ) преобразует электрическую энергию промышленной сети трехфазного переменного тока в электрическую энергию постоянного тока и регулирует величину выходного напряжения U, питающего цепь якоря двигателя Д. Преобразователь энергии является линейным звеном. Выходное напряжение U равно номинальному значению при напряжении управления 10 В. С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени УС - усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства. КУ - корректирующее устройство. Корректирующее устройство корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1. БЗ - блок задания, состоящий из источника стабилизированного напряжения и резистора R3, задает напряжение Uз величина которого определяет величину задания выходной координаты САР. ДУ - измерительная система выходной координаты процесса резания. С точки зрения динамики представляет собой апериодическое звено первого порядка с постоянной времени ТДУ. При номинальном значении выходной координаты выдаёт напряжение Uос=5 В. С - сумматор на базе операционного усилителя, безынерционное звено с коэффициентом передачи равным 1. Суммирование осуществляется по алгоритму Uс=Uз-Uос. Функциональная схема будет выглядеть так: 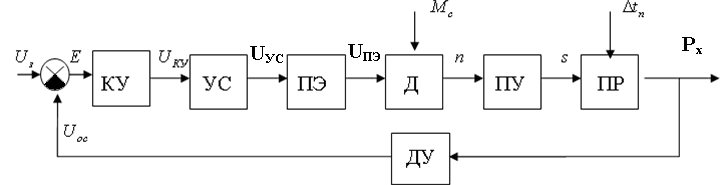 Рис. 4. Функциональная схема САР Иначе, по алгоритму функционирования данная САР является следящей. В ней выходная величина – скорость резания – регулируется с заданной точностью при изменением напряжения на входе, т.е. система управляет выходной координатой. На вход системы подается напряжение Uз, соответствующее заданной скорости резания. Это напряжение сравнивается с напряжением Uос, поступающим с датчика обратной связи. Если существует ненулевая разница этих напряжений – ошибка регулирования , то она с соответствующим знаком поступает на КУ, УС, ПЭ. ПЭ таким образом меняет напряжение на своем выходе, чтобы свести ошибку регулирования - путем изменения скорости вращения двигателя к минимуму или нулю. Если на систему действуют возмущения, то система с обратной связью будет компенсировать эти возмущения, поддерживая скорость резания постоянной.
Структурную схему составим на основании функциональной схемы, используя данные курсовой работы по САУ Преобразователь энергии, с точки зрения динамики процесса является апериодическим звеном второго порядка. Его передаточная функция: Значение постоянных времени T1 и T2 дано в исходных данных, а значение коэффициента передачи найдем из условия номинального значения напряжения якоря двигателя. Согласно системе уравнений:  ; ; двигатель можно представить в виде следующей схемы: 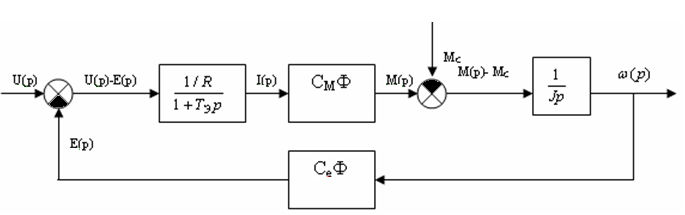 Рис. 5. Схема электропривода Передаточная функция двигателя рассчитывается следующим образом: 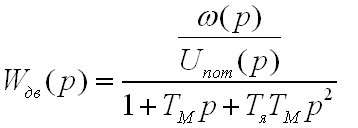  ; ;  ,где ,где  (кг*м2); (кг*м2);Передаточная функция имеет следующий вид: Передаточное устройство является линейным звеном. Зная номинальные значения частоты вращения вала двигателя и подачи на зуб фрезерного станка, запишем передаточную функцию:  , , тогда Wпу(р) =  [мм*мин/(зуб*об)] [мм*мин/(зуб*об)]Процесс резания как объект управления с учетом возмущений опишем используя формулу (4). Но описанный процесс резания будет нелинейным звеном, а в данной части ТАУ мы изучаем линейные звенья. Поэтому нам придется линеаризовать это звено. Для этого построим график изменения погрешности обработки от подачи и проведем касательную в рабочей точке этой зависимости. Δ[мкм]  S[мм/об] S[мм/об]Рис. 6. Линеаризация процесса резания Уравнение касательной будет иметь вид: Для получения коэффициента передачи при действии возмущении tп проанализируем уравнение Таким образом, процесс резания представляется в следующем виде: 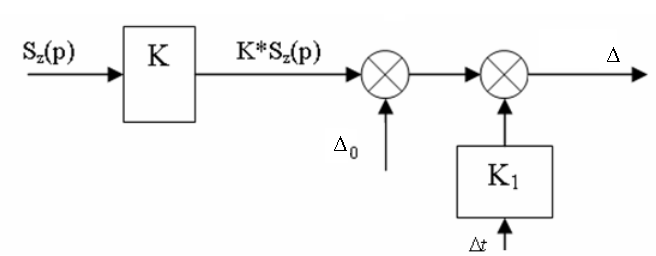 Рис.7. Линеаризованный процесс резания Где К – тангенс угла наклона касательной к графику в рабочей точке. К = 253.2. Δ0 – отклонение касательной от начала координат. Δ 0 = 4.3. Датчик обратной связи, Wду(р)=Кду/(Тду*р+1); Wду(р)=5/14.35=0.348 В/мкм Усилитель УС. Для обеспечения требуемых свойств САР то коэффициент принимаем исходя из следующих условий: т.к. Δз = Δр/(1+Крс), и Δз = 0.001*Δр, тогда: Δр/(1+Крс)= 0.001*Δр; 1+Крс=1000; Крс =999; Крс = 999 = Кус*Кпэ*Кд*Кпу*Кпр*Кду = 0,046*Кус, откуда Кус = 21546. Учитывая все сказанное выше составляется структурная схема САР: 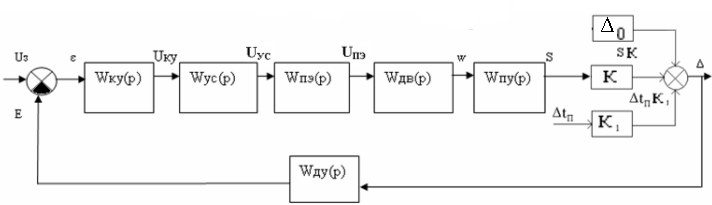 Рис. 8. Структурная схема САР Корректирующее устройство. В качестве корректирующего устройства принимаем интегродифференцирующее звено с передаточной функцией вида: После расчета корректирующего устройства по методу анализа и синтеза САР с использованием ЛЧХ принимаем: Переходный процесс получившейся САР (идет стабилизация возмущения на 10 секунде моделирования): 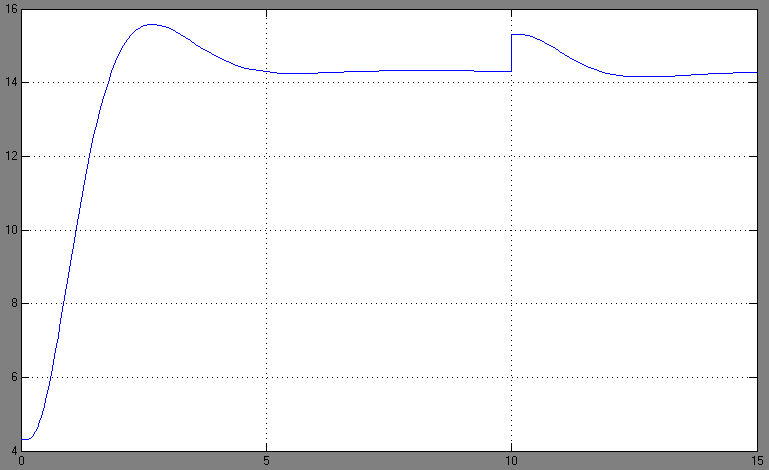 Рис.9. Основной контур системы: 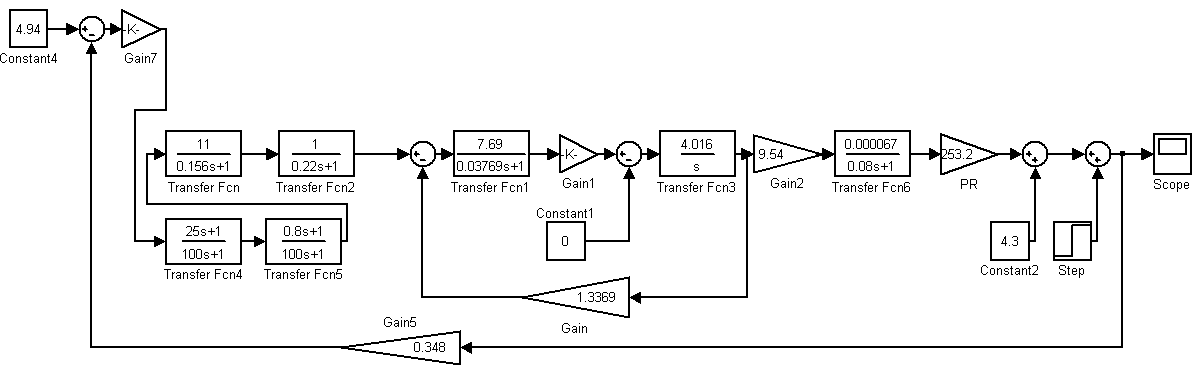 Рис. 10. Структурная схема системы
Данная схема обеспечивает лишь устойчивость системы при отсутствии параметрических возмущений или при их весьма маленьком воздействии. На практике с течением времени могут меняться параметры объекта управления. Данная система не может обеспечить требуемое качество переходного процесса при значительных возмущениях, поэтому необходимо синтезировать систему управления, способную компенсировать действие параметрических возмущений. Обеспечение высокой точности изготовления деталей современных машин при использовании обычных методов лезвийной обработки сопряжено с большими материальными затратами, высокой трудоёмкостью и связано с понижением производительности обработки. Традиционные методы решения этой задачи, такие как увеличение точности и жёсткости станков, в настоящее время уже исчерпали себя. Эту проблему можно решить путём применения станков с программным управлением, системами адаптивного управления движениями резания. Адаптивное резание - это способ механической обработки, обеспечивающий оптимизацию процесса за счёт изменения условий обработки, прежде всего режимов резания в зависимости от конкретных условий. АдСУ перерабатывают непрерывно поступающую информацию о величине принятого для регулирования критерия, например силы, температуры, интенсивности вибраций. Коэффициент передачи процесса резания за один проход может изменяться более чем в 100 раз. Кроме рассмотренных факторов на изменение системы могут оказывать влияние и другие факторы: изменение условий среды, в которой происходит обработка (изменение свойств СОЖ), изменение физико-химических свойств обрабатываемого и инструментального материала. При таких вариациях коэффициента передачи процесса резания обычные САУ с постоянными параметрами корректирующих и управляющих элементов не смогут обеспечить требуемые условия точности в изменяющихся условиях процесса резания. Например, при изменении коэффициента передачи процесса резания в 10 раз переходный процесс обычной САУ будет выглядеть так, как показано на рисунке. Видно, что система не может справиться с такими возмущениями. 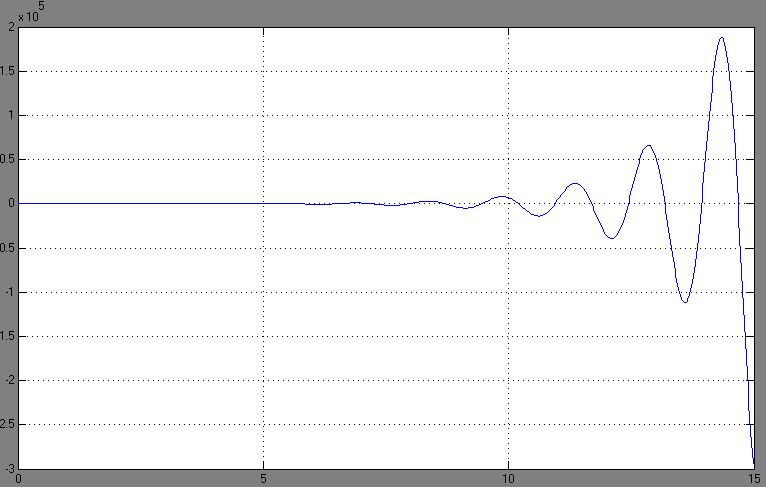 Рис.11. Для обеспечения требуемых свойств системы необходимо синтезировать структуру АдСУ, инвариантную к изменению коэффициента передачи объекта управления.
По типу контура адаптации выбираем замкнутую систему. По способу адаптации различаются адаптивная система управления с прямой и непрямой адаптацией. Так как математическая модель процесса точения известна, то адаптивная система управления должна приблизить движение реальной системы управления к движению «эталонной модели», т.е. выбираем адаптивная система управления с прямой адаптацией.
Для того, чтобы исключить влияние изменения коэффициента резания при действии возмущенийна погрешность обработки, необходимо построить систему, которая бы отслеживала изменение этого коэффициента и вводила в основной контур корректирующий сигнал, обратно пропорциональный коэффициенту передачи процесса резания. При этом управляющее воздействие привода подачи изменится, значит изменится и скорость вращения двигателя, а следовательно и подача, причем ее изменение будет пропорционально изменению коэффициента резания.
По характеру настройки устройства управления основного контура выбираем самый простой тип адаптивной системы управления – самонастраивающаяся:
Сигнал с преобразователя энергии подаётся на модель и реальный объект, которые включают в себя двигатель и процесс резания. Далее, выходной сигнал реального объекта делится на выходной сигнал модели, получаем сигнал, пропорциональный изменению коэффициента передачи процесса резания. Затем, напряжение на выходе преобразователя изменяем в соответствующую сторону делением выхода преобразователя на полученный сигнал. Рис. 12. Функциональная схема АдСУ 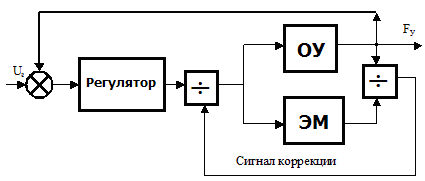
Синтезированная АдСУ приведена на рисунке: 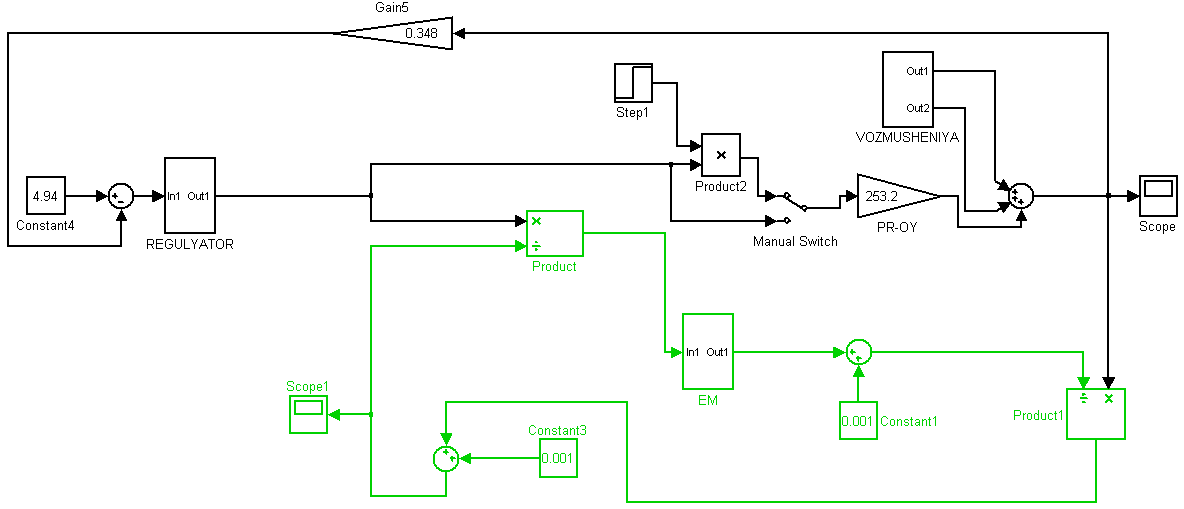 Рис. 13.
Из графиков переходных процессов, протекающих в системе видно, что система без контура стабилизации не удовлетворяет никаким требованиям задания, т.к. при любом изменении коэффициента резания изменяется и погрешность обработки, что недопустимо. 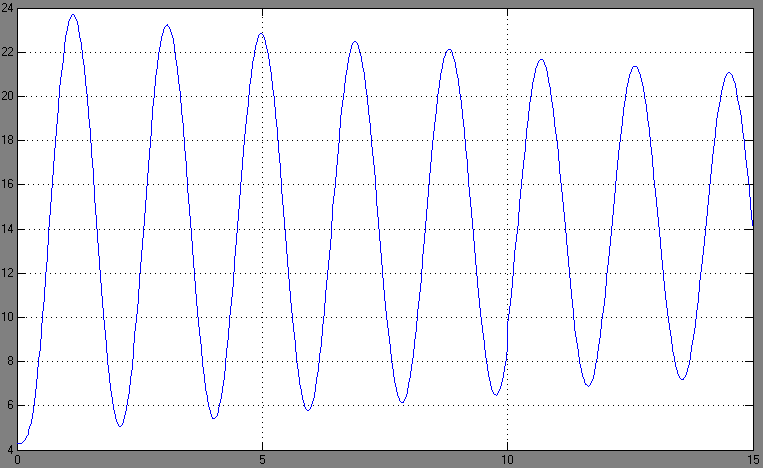 Рис. 14.Переходной процесс в системе с отключенными контуром адаптации при изменении коэффициента резания в 5 раз При включении контура адаптации процесс остаётся устойчивым при любом изменении коэффициента резания: 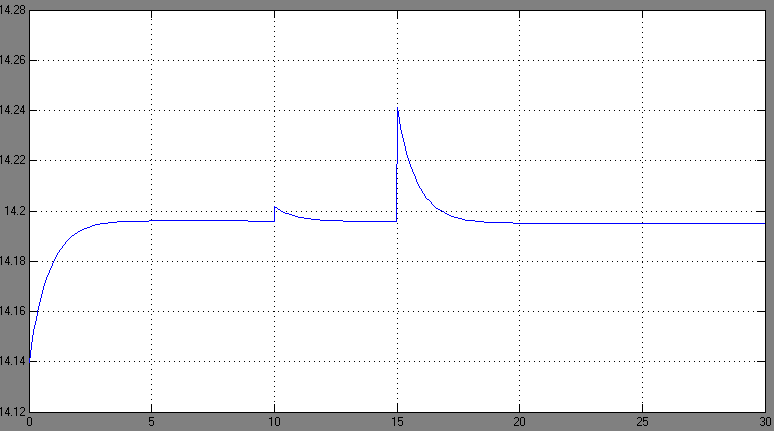 Рис. 15. Переходный процесс в системе с включенным контуром адаптации при изменении коэффициента резания в 10 раз  Рис. 16. Изменение напряжения на входе двигателя в системе с включенным контуром адаптации при изменении коэффициента резания в 10 раз (сигнал коррекции)Как видно из рисунков, адаптивный наблюдатель очень быстро определяет изменение коэффициента резания и может уверенно отслеживать это изменение. Но система отрабатывает управляющий сигнал достаточно долго. Это связано с большой инерционностью электропривода. Но, как показывает опыт, изменение коэффициента резания в десятки раз, происходит обычно не слишком быстро. Поэтому данная система может быть вполне работоспособной в реальных условиях.
В процессе выполнения курсовой работы был рассмотрен процесс резания, как объект управления. Была поставлена задачу проектирования системы управления приводом подачи, которая была бы инвариантна к изменению коэффициента резания и других параметров внутри объекта управления на основе уже разработанной САР. Параметрами изменения коэффициента резания могут быть: износ инструмента, глубина резания, твердость материала заготовки, а также температура окружающей среды, свойства охлаждающей жидкости, изменение геометрии инструмента, загрязнения, износ механизма подачи и др. В результате была синтезирована простейшая система адаптивного управления, которая, тем не менее, полностью удовлетворяет поставленным задачам. Полученная система устойчива и отрабатывает любые теоретически сколь угодно большие изменения коэффициента резания. Все элементы контура адаптации физически реализуемы. Поставленные цели были достигнуты. |