Дипломная работа Курбанов И.И.. Аннотация Дипломная работа состоит из 5 основных частей (разделов)
 Скачать 488.7 Kb. Скачать 488.7 Kb.
|

|
 = 10 ∙ (12 + 24 + 12 + 14 + 10 + + 33 ) ∙ 3 = 3150 м2; (2.5.3.)
= 10 ∙ (12 + 24 + 12 + 14 + 10 + + 33 ) ∙ 3 = 3150 м2; (2.5.3.) а = ΣРСЦ ∙ fуд = (Равт. + Ррук + Рс.з.) ∙ 4,5 = (30 + 2 + 82) ∙ 4,5 = 513 м2; (2.5.4.)
а = ΣРСЦ ∙ fуд = (Равт. + Ррук + Рс.з.) ∙ 4,5 = (30 + 2 + 82) ∙ 4,5 = 513 м2; (2.5.4.)  =
=  +
+  +
+  +
+  = 1402 + 546,022 + 3150 + 513 = 5611,022 м2;
= 1402 + 546,022 + 3150 + 513 = 5611,022 м2; Наименование зон, участков, помещений | Площадь, м2 |
производственные зоны и участки | 1402 |
складские помещения | 546,022 |
автомобильные стоянки | 3150 |
административно-бытовые помещения | 513 |
Итого: | 5611,022 |
Вывод
Производственная программа характеризуется числом комплексно обслуживаемых автомобилей в год, т.е. автомобилей, для которых на станции выполняется весь комплекс работ по поддержанию их в технически исправном состоянии в течение года
Годовой объем работ городских станций обслуживания включает ТО, ТР, уборочно-моечные работы и предпродажную подготовку автомобилей.
К производственным рабочим относятся рабочие зон и участков, непосредственно выполняющие работы по ТО и ТР автомобилей. Различают технологически необходимое (явочное) и штатное число рабочих.
Посты и автомобиле-места по своему технологическому назначению подразделяются на рабочие посты, вспомогательные и автомобиле-места ожидания и хранения.
Рабочие посты – это автомобиле-места, оснащенные соответствующим технологическим оборудованием и предназначенные для технического воздействия на автомобиль, для поддержания и восстановления его технического исправного состояния и внешнего вида (посты мойки, ТО ТР).3. Конструкторская часть
3.1. Устройство и принцип работы двухстоечного электромеханического подъемника
Целью конструкторской части является проектирование и расчет двухстоечного автомобильного подъемника с электромеханическим приводом.
Двухстоечный подъемник включает следующие основные системы:
— несущая система;
— приводная система (механизма силовой передачи) ;
— электрическая система управления приводом;
Рассмотрим более подробно устройство и принцип работы 2-стоечного напольного подъемника (см. рис. 3.1). Он состоит из двух коробчатых стоек и поперечины 2. В каждой стойке размещен винт 3, по которому перемещается грузоподъемная балка 4 с раздвижными подхватами 5. Ходовые винты приводятся во вращение от электродвигателя 6 через червячный редуктор 7, установленный на одной из стоек. Вращение на другой винт передается с помощью цепной передачи 8, смонтированной внутри поперечины 2 . Подъемник крепится к полу анкерными болтами 9. Упорные ролики 10 освобождают винт от изгибающих усилий.
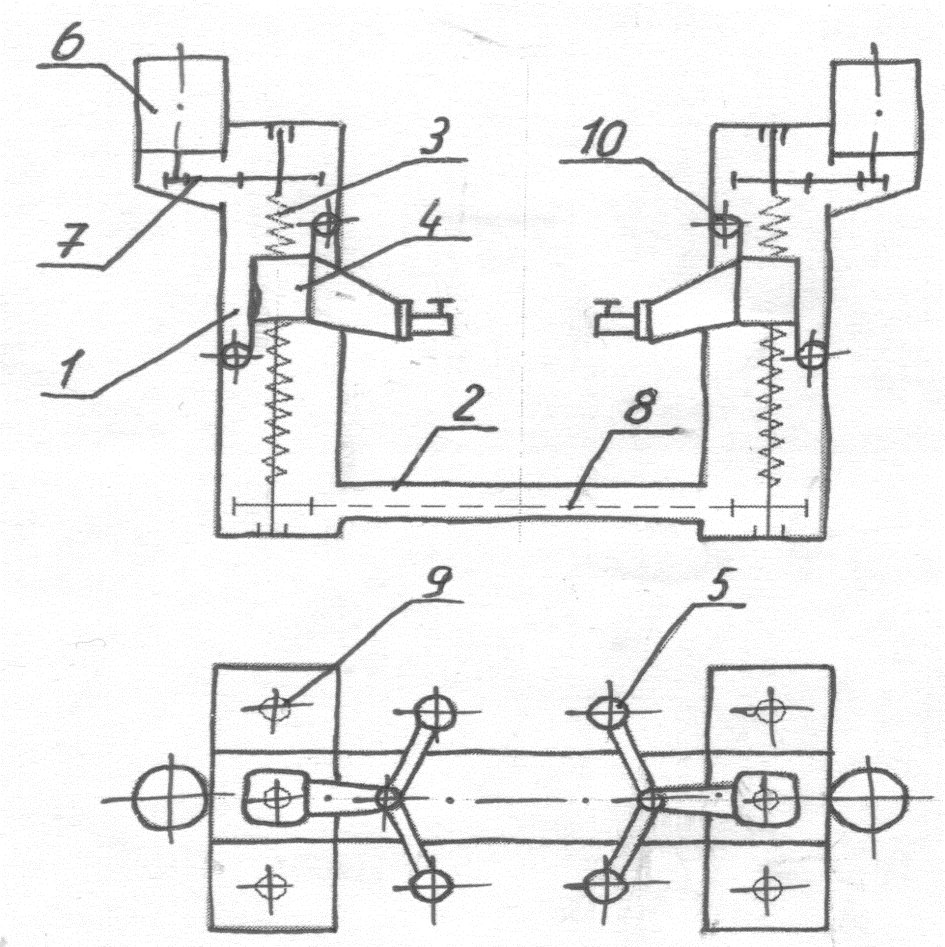
Рис. 3.1. Схема винтового электромеханического подъемника.