Эл.учебник Шелухин начало. Автоматизация и механизация сортировочных
 Скачать 3.04 Mb. Скачать 3.04 Mb.
|

|
ГЛАВА 3. Напольные датчики горочных систем автоматизации 3.1. Индуктивные датчики Магнитоиндукционный датчик педального типа Широкое применение на железнодорожном транспорте нашли датчики магнитоиндукционного типа. Бесконтактная магнитная педаль типа ПБМ-56 представляет собой путевой датчик без источника питания, состоящий из постоянного магнита размером 60x68x80 мм с насаженной на него обмоткой, имеющей 5000 витков из провода ПЭЛШО диаметром 0,27 мм. Сопротивление обмотки 300 Ом. Датчик устанавливают на рельс внутри колеи. Верхнюю плоскость магнита располагают на 10 мм ниже головки рельса. При прохождении колеса или другой ферромагнитной массы над педалью изменяется конфигурация магнитного потока Ф, в результате чего в обмотке индуцируется ЭДС — Е: E= - ω dФ/dt Скорость прохождения колеса над педалью определяет скорость изменения магнитного потока (dФ/dt) и, следовательно, значение выходного сигнала Е. В момент проследования колеса над центром педали выходной сигнал меняет полярность. Приемником сигнала от педали является поляризованное реле РП-7 в релейной ячейке РЯ-ПБМ-56 (рис. 3.1). Опыт эксплуатации датчиков ПБМ-56 на сортировочных горках показал их невысокую надежность. Причинами отказов этих датчиков являются: вибрация рельсов; напрессовка снега и льда; механические повреждения; влияние магнитных полей тяговых двигателей; климатичес- Р 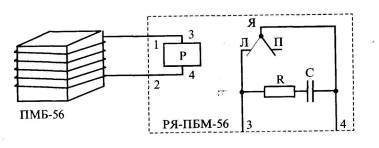 ис. 3.1. Педальный датчик ПБМ-56 кие факторы. Существенные недостатки датчика — это низкая чувствительность, зависящая от скорости движения отцепа; низкая помехозащищенность от токов в рельсовых линиях. Более совершенным считается путевой датчик трансформаторного типа ДП-50 с преобразователем сигнала путевого датчика ПСДП-50 (рис. 3.2). Принципиальной особенностью этого датчика является возможность фиксации нулевых скоростей движения ТС. Чувствительный элемент датчика состоит из двух стержневых магнитопроводов. На них надеты катушки с питающими обмотками ωпс, ωпк, соединенными последовательно, и катушки с выходными обмотками ωвс и ωвк, которые включены последовательно и встречно. При подаче переменного напряжения на питающие обмотки создаются сигнальный Фс и компенсационный Фк магнитные потоки. В отсутствие колеса над датчиком потоки замыкаются по цепям: поток Фс -— через сигнальный магнитопровод, воздушные промежутки, головку рельса; поток Фк — через компенсационный магнитопровод, воздушные промежутки, подошву рельса. В отрегулированном датчике эти потоки одинаковы и по амплитуде и по фазе, следовательно, ЭДС, индуцируемые в выходных обмотках, будут одинаковыми, а выходное напряжение на зажимах 3—4 равно нулю. При появлении реборды колеса над датчиком воздушные промежутки сигнального стержня уменьшаются. В результате увеличивается ЭДС, наводимая в обмотке ωвс. На выходе возникает разность ЭДС, являющаяся сигналом наличия колеса в зоне датчика. Сигнал передается по кабелю на вход преобразователя ПСДП-50. Преобразователь имеет: конденсатор С1; разделительный трансформатор Тр; выпрямительный мост Д1—Д4; сглаживающий конденсатор С2; пороговый элемент на транзисторах Т1 и Т2. 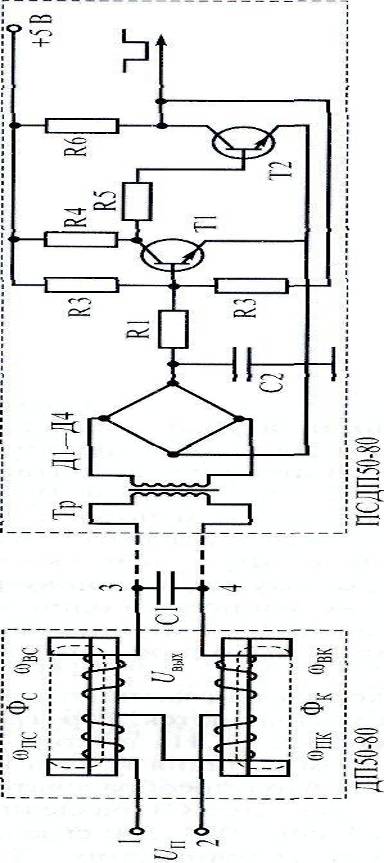 Рис. 3.3 Датчик трансформаторного типа Если на входе преобразователя сигнала нет. то транзистор Т1 открыт положительным потенциалом отделителя, образуемого резисторами R2 и R3. При увеличении сигнала до величины порога срабатывания ток транзистора Т1 скачкообразно уменьшается, а транзистор Т2 открывается, выдавая выходной сигнал. В этом состоянии преобразователь находится до тех пор, пока входное напряжение не уменьшится до напряжения отпускания. Пороговый элемент срабатывает при напряжении 1,2—1,3 В, а обесточивается при напряжении 0,5—0,6 В. Изменение зоны чувствительности датчика существенно зависит от ориентации датчика в горизонтальной и вертикальной плоскостях, от износа рельса и проката бандажа. Индуктивный датчик Индуктивный датчик (ИД), называемый также датчиком счета осей колесных пар (УСО), представляет собой многоконтурный обнаружитель, позволяющий реализовать не только функции обнаружения транспортного средства, но и фиксировать направление движения вагона. ИД состоит из двух частей: собственно первичного датчика, состоящего из трех катушек индуктивности, размещаемых в одном корпусе, который закрепляется на рельсе, и преобразователя сигналов (ПС), размещаемого в напольном ящике вблизи пути (рис. 3.3). Датчик предназначен для фиксации осей вагонов, следующих по участку, ограниченному ИД, и передачи информации на управ- Рис. 3.3. Индуктивный датчик  ляющии вычислительный комплекс, размещаемый на посту электрической централизации. Электропитание ИД осуществляется от сети переменного тока частотой 50 Гц, напряжением (36+4) В. Потребляемый ток не более 0,05 А. Функциональная схема датчика представлена на рис. 3.4. Первичный преобразователь датчика представляет собой совокупность трех катушек индуктивности без сердечника КИ1, КИ2, КИЗ, размещаемых в специальном конструктиве, который прикрепляется непосредственно к рельсу. Причем, две катушки КИ1 и КИЗ, назовем их рабочими, располагаются в корпусе горизонтально, их плоскости намотки параллельны рельсу, а третья, вспомогательная, находится между ними, и ее плоскость перпендикулярна плоскости других катушек индуктивности. Вследствие этого преобразователь сигнала датчика строится по трехканальной схеме. Два рабочих канала ПС выполняют функции счетчиков осей движущегося вагона. Они практически симметричны и включают резонансные каскады РК1 и РК2, компараторы сигналов К1 и К2, дискретные делители частоты сигнала Д2 и Д4, каскады оптоэлектрокной развязки ОР1 и ОРЗ, индикаторы состояния каналов И1 и ИЗ, выходные цепи передачи сигналов на пост ЭЦ —- ВЫХ.Сч1 и ВЫХ.Сч2. Третий канал выполняет в основном функции контроля работоспособности датчика, главным образом в части наличия первичного преобразователя, закрепленного на рельсе, и включает в себя те же функциональные узлы, что и основные каналы. Выходной сигнал вспомогательного канала представляет собой дискретный сигнал частотой 1 Гц, транслируемый на пост ЭЦ с выхода «Контроль исправности». В преобразователе сигналов имеется автогенератор опорного сигнала с кварцевой стабилизацией частоты. Ориентация катушек индуктивности датчика такова, что колесные пары вагона поочередно проезжают над катушкой КИ1, а затем над катушкой КИЗ в одном направлении либо наоборот при обратном движении. В момент проезда колесной пары над соответствующей катушкой регистрируется сигнал с соответствующего счетного выхода одного из каналов Сч1 или Сч2. При этом в случае регистрации равенства въехавших и выехавших осей через счетную точку, принимается решение о наличии либо отсутствии транспортного 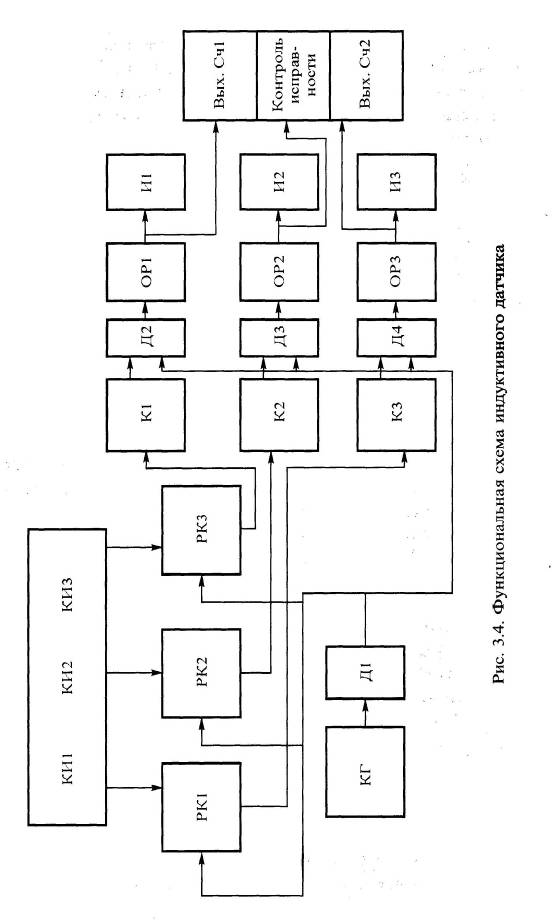 средства в зоне контроля. Помимо названной функции датчик позволяет фиксировать и направление движения транспортного средства в зависимости от очередности во времени появления счетных импульсов с выхода первой или второй катушек КИ1, КИЗ. В исходном состоянии с выхода кварцевого генератора в каждый канал ПС датчика через делитель Д1 на вход резонансных каскадов РК1, РК2, РКЗ поступает сигнал опорной частоты. Резонансные контуры каскадов образованы индуктивностями катушек КИ1, КИ2, КИЗ и собственными емкостями, которыми в процессе установки и настройки датчика подстраивают контуры в резонанс или вблизи него. Эти сигналы с выходов резонансных каналов поступают на соответствующие компараторы, выполняющие функции пороговых элементов, и при достаточном уровне сигнала транслируются через делители частоты Д2, ДЗ, Д4, каскады оптоэлектронной развязки ОР одновременно на встроенные индикаторы И1, И2, ИЗ и на соответствующие выходы в линию связи. Таким образом в исходном состоянии на каждом счетном выходе Вых.Сч1 и Вых.Сч2 как и на контрольном, в линию на пост ЭЦ передаются переменные дискретные сигналы, свидетельствующие о работоспособном состоянии датчика и отсутствии колесных пар вагона в зоне действия датчика. Одновременно в ПС светятся индикаторы И, один из которых мигает — И2 с частотой 1Гц. Эта индикация предназначена для контроля функционирования датчика электромехаником. При въезде колесной пары вагона в зону действия одной из катушек, например КИ1, изменяется начальная настройка резонансного контура РК1. Напряжение на его выходе, подаваемое на вход компаратора KI, уменьшается до величины, приводящей к его закрытию. Вследствие этого пропадает импульсный сигнал на счетном выходе Вых.Сч1, гаснет индикатор И1, что свидетельствует о наличии колесной пары вагона в зоне К1. При выезде колесной пары из зоны действия катушки КИ1, настройка резонансного контура РК1 восстанавливается, напряжение на входе компаратора К1 открывает его, и на выходе этого канала возобновляется трансляция переменного дискретного сигнала. Аналогично функционирует и другой рабочий канал, образованный катушкой КИЗ. На посту ЭЦ в управляющем вычислительном комплексе ведется обработка поступающих с датчиков сигналов по алгоритму счета осей колесных пар, определению направления движения отцепа, занятости или свободное™ контролируемого участка. Следует заметить, что работа вспомогательного канала, регистрирующего исправное состояние датчика, не прекращается и при въезде колесной пары в зону его действия благодаря начальной настройке функциональных узлов компаратора. Датчик индуктивно-проводной (ИПД) предназначен для эксплуатации на объектах железнодорожного транспорта и служит для определения свободности или занятости подвижным составом контрольного участка железнодорожного пути. ИПД рекомендован для замены педалей и рельсовых цепей на стрелочных участках сортировочных горок, оборудованных системой ГАЦ (рис. 3.5). В системах горочной автоматической централизации ИПД служит дополнительным элементом защиты стрелок от несанкционированного перевода при потере шунта и проходе длиннобазных вагонов. ИПД обеспечивает контроль свободности или занятости участков пути в пределах уложенного шлейфа от подвижного состава с металлической ходовой частью. В состав ИПД входит аппаратура, располагающаяся в зависимости от функционального назначения в релейном помещении или на поле. В релейном помещении находятся предохранители в цепях  Рис. 3.5. Индуктивно-проводной датчик (ИПД) питания датчика и реле типа НМШ2-4000, воспринимающие сигналы от электронного блока (ЭБ). Электронный блок помещен в трансформаторный ящик, установленный непосредственно у контролируемого участка пути. Входная часть ЭБ связана с индуктивным шлейфом (ИШ). Он располагается внутри железнодорожной колеи в пределах контролируемого участка и крепится к шейке рельсов, изготавливается на месте установки и содержит катушку индуктивности, образованную из 7 жил кабеля КВВГ 7х 1.5 (рис. 3.6). Концы кабеля заводятся в путевой ящик (рис. 3.7), где жилы кабеля распределяются на клемной колодке в катушку индуктивности. Шлейф крепится к подошве рельсов при помощи крепежных скоб (см. рис. 3.6). Для защиты от механических повреждений кабель помещен в резинотканевый рукав. Длина шлейфа выбирается от конкретной длины предстрелочного участка. ИШ должен крепиться к шейке рельсов в каждом шпальном ящике, в местах установки накладок шлейф должен крепиться скобами к каждой шпале. Принцип контроля подвижного состава основан на изменении частоты и амплитуды генератора гармонических колебаний датчика под действием металлической массы вагона (рис. 3.8). Индуктивный шлейф является чувствительным элементом датчика, выполняющего роль индуктивности колебательного контура генератора. Если контролируемый участок пути свободен, генератор гармонических колебаний выдает на вход порогового устройства (ком- 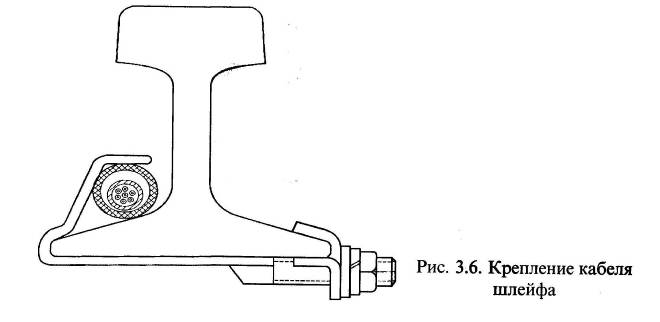 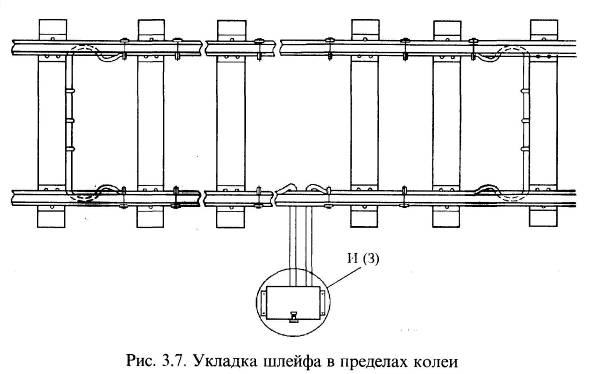 паратор 1) сигнальную частоту (синусоидальной формы установленной частоты и амплитуды). При этом пороговое устройство формирует сигнал управления выходным каскадом, и на выход ЭБ в нагрузку поступает сигнал постоянного тока напряжением примерно 24 В на нагрузке 1440 Ом. При занятости контролируемого участка это напряжение уменьшается до величины, не превышающей 2,4 В. Начало контролируемого участка датчика соответствует «наезду» первой колесной пары отцепа на ИШ и срабатыванию датчика. Конец контрольного участка соответствует «съезду» последней колесной пары отцепа с изолирующих стыков стрелки и восстановлению работы датчика. Структурная схема ИПД представлена на рис. 3.8. При занятости контролируемого участка уменьшается добротность колебательного контура датчика, уменьшается амплитуда сигнальной частоты либо происходит полный срыв колебаний, что приводит к формированию компаратором 1 сигнала управления выходным каскадом, при этом выходной сигнал на нагрузке будет отсутствовать, и светодиод «Выход» не будет светиться. ЭБ состоит из следующих узлов: генератора гармонических колебаний; контрольной схемы; схемы автоподстройки; выходного каскада. Сигналом с выхода компаратора 1 дается разрешение на работу схемы автоподстройки и контрольной схемы при свободном 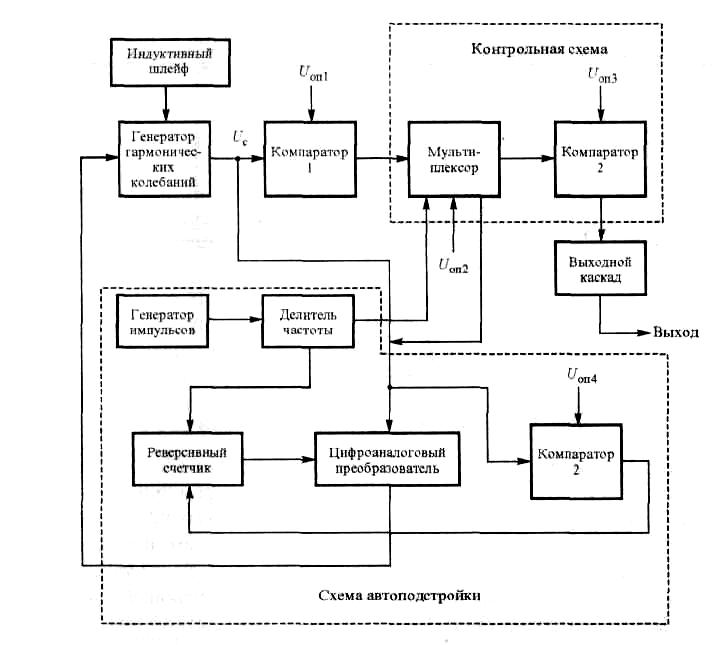 Рис. 3.8. Структурная схема ИПД участке пути. При этом на выходе ЭБ формируется напряжение постоянного тока +24 В. При занятом участке работа схемы автоподстройки и контрольной схемы блокируются, и выходной сигнал при этом будет отсутствовать. В реальных условиях на рамку ИШ действует не только металлическая масса вагона, но и климатические факторы (в частности, влажность). В результате амплитуда колебаний генератора датчика может изменяться, в то время как порог срабатывания датчикаостается постоянным. Это может привести либо к «пропуску» базы вагона, либо к выдаче ложного сигнала занятости. Поэтомув преобразователе датчика реализована схема стабилизации амплитуды колебаний генера- тора датчика. Эту функцию выполняет схема автоподстройки. Принцип ее действия основан на том, что в цепь ООС генератора введено регулирующее звено, которое изменяет глубину ООС в зависимости от изменения амплитуды колебаний в ИШ генератора датчика. Регулирующее звено состоит из цифроаналогового преобразователя (ЦАП), работающего в следящем режиме. Выходной сигнал генератора гармонических колебаний поступает на вход ЦАП и 3-Й компаратор. На 2-ой компаратор подается опорное напряжение, которое и определяет величину выходного сигнала на выходе генератора. Если сигнал на входе компаратора вышеопорного, то на его выходе формируется сигнал, дающий команду на вычитание числа в реверсивном счетчике. При этом сигнал с выхода ЦАП увеличит уровень ООС генератора и сигнал на его выходе уменьшится. Уменьшение сигнала будет происходить до тех пор, пока он не станет меньше Uоп4. После этого на выходе компаратора формируется сигнал, дающий команду на сложение числа в реверсивномсчетчике. В этом случае сигнал с выхода ЦАП уменьшает величину ООС генератора и сигнал на его выходе увеличивается. Напряжение на входе компаратора возрастает на величину Uс/2n, где п -— число разрядов ЦАП, и компаратор вновь даст команду на вычитание. С каждым следующим тактом компаратор будет выдавать команду либо на сложение, либона вычитание, а величина выходного сигнала — синхронно изменяться. Схема автоподстройки и контрольная схема с выходным каскадом расположены на модуле ЭМ2 электронного блока датчика. Для контроля работоспособности ИПДэлектронный блок имеет контрольную схему, которая выдает сигнал об исправности, если величина сигнала в контрольной точкеКГ, определяющая работоспособность ИПД, не превышает заданной величины. Для обеспечения условия безопасности работы ИПД контрольная схема ЭБ работает в импульсном режиме. Электронный блок выдает напряжение постоянного тока +24 В, которое питает исполнительное реле. Контроль работоспособности ИПД осуществляется визуально светодиодом «Выход». Конструктивно-электронный блок представляет собой объемную конструкцию, внутри которойрасположены две съемные печатные платы. На одной плате (модуль ЭМ1) — источник питания, генера- 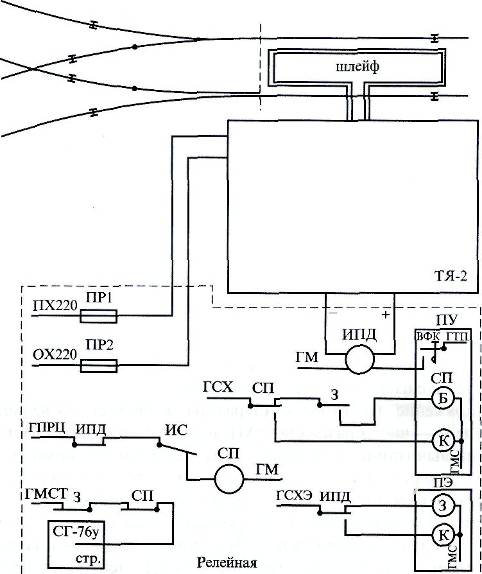 Рис. 3.9. Схема включения датчика ИПД в устройства ГАЦ тор синусоидальных колебаний и генератор импульсов, а на второй (модуль ЭМ2) — элементы схемы автоподстройки контрольной схемы (схема выходного каскада). На верхних панелях помещены элементы настройки и индикации, вывод контрольной точки. Электронный блок устанавливается внутри путевого ящика на металлическое основание. Выводы ЭБ, а также внешних цепей и цепи питания, крепятся на клеммной колодке внутри путевого ящика. На рис. 3.9 показана схема подключения ИПД в цепь управления стрелочным приводом.  Рис.3.10. Магнитный датчик Помимо рассмотренных датчиков индуктивного типа в эксплуатации встречаются и магнитные датчики типов ДМ 88М, ДМ 88С, ШМП 93 (рис. 3.10), предназначенные для счёта осей и формирования «пусковых» сигналов вместо педального датчика ПБМ-56. |