Электрические измерения. Электрические измерения 12. 1 Значение электрических измерений
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

|
12.6. УСПОКОИТЕЛИ Подвижная часть прибора вместе с пружиной образует обладающую массой и упругостью механическую систему, в которой, следовательно, возможны механические колебания. Поэтому при изменении измеряемой величины новое положение равновесия у подвижной части прибора получается не сразу, а в большинстве случаев после нескольких колебаний около нового положения равновесия. Для того чтобы подвижная часть возможно скорее устанавливалась в этом положении, у приборов есть успокоители. Последние нужны для поглощения кинетической энергии подвижной части. Для большинства стрелочных приборов время успокоения должно быть не более 4 с, причем временем успокоения считается время от момента включения прибора до момента, когда стрелка прибора отклоняется от положения равновесия не более чем на 1 % шкалы. В настоящее время в широко распространенных приборах применяются магнитоиндукционные и воздушные успокоители. М 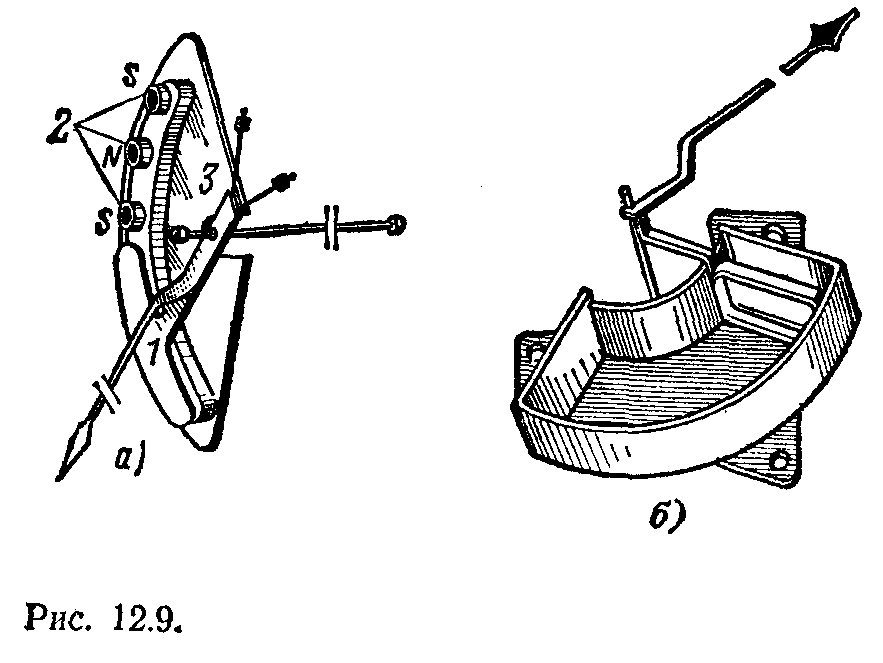 агнитоиндукционные успокоители основаны на взаимодействии вихревых токов, индуктируемых в подвижной части при ее движении в магнитном поле постоянных магнитов, с этим полем. Алюминиевый сектор 1 (рис. 12.9, а), укрепленный на оси подвижной части, движется в поле нескольких постоянных магнитов 2, которые укреплены на опорной пластине 3. При движении сектора в нем возникают вихревые токи. Их взаимодействие с магнитным полем постоянных магнитов создает силу, которая (согласно принципу Ленца) тормозит подвижную часть. агнитоиндукционные успокоители основаны на взаимодействии вихревых токов, индуктируемых в подвижной части при ее движении в магнитном поле постоянных магнитов, с этим полем. Алюминиевый сектор 1 (рис. 12.9, а), укрепленный на оси подвижной части, движется в поле нескольких постоянных магнитов 2, которые укреплены на опорной пластине 3. При движении сектора в нем возникают вихревые токи. Их взаимодействие с магнитным полем постоянных магнитов создает силу, которая (согласно принципу Ленца) тормозит подвижную часть.В воздушных успокоителях для торможения используется разность давлении воздуха в закрытой камере по обе стороны легкого алюминиевого крыла, возникающая при его движении (рис .12 9% Крыло укреплено на оси подвижной части прибора Воздушные успокоители значительно слабее магнитоиндукциых их приходится применять в тех случаях, когда наличие постоянного магнита внутри прибора может быть причиной дополнительных погрешностей в его показаниях. В некоторых новых приборах установлены очень компактные жидкостные успокоители: в невысыхающей жидкости перемещается крыло, укрепленное на подвижной части прибора. 12.7. СИСТЕМЫ ПОКАЗЫВАЮЩИХ ПРИБОРОВ Любой прибор непосредственного отсчета состоит из двух основных частей: измерительного механизма и измерительной цепи (измерительной схемы). Назначение измерительного механизма — преобразование подводимой к нему электрической энергии в механическую энергию перемещения подвижной части и связанного с ней указателя. Измерительная цепь преобразует измеряемую электрическую величину (напряжение, мощность, ток и т. д.) в пропорциональную ей величину, непосредственно воздействующую на измерительный механизм. Например, в вольтметре измерительная цепь состоит из катушки измерительного механизма и добавочного резистора. При постоянстве сопротивления измерительной цепи ток в измерительном механизме вольтметра пропорционален измеряемому напряжению. Один и тот же измерительный механизм в соединении с различными измерительными цепями может служить для измерения различных величин. В зависимости от принципа действия различают несколько систем показывающих приборов, условные изображения которых даны в табл. 12.2. Магнитоэлектрическая система. В измерительных механизмах магнитоэлектрической системы вращающий момент создается взаимодействием измеряемого постоянного тока в катушке механизма с полем постоянного магнита. Существуют два основных типа приборов магнитоэлектрической системы: приборы с подвижной катушкой (подвижной рамкой) и приборы с подвижным магнитом, причем первые применяются значительно чаще, чем вторые. В магнитоэлектрическом механизме с подвижной катушкой последняя установлена на опорах и может поворачиваться в воздушном зазоре магнитной цепи постоянного магнита. Р 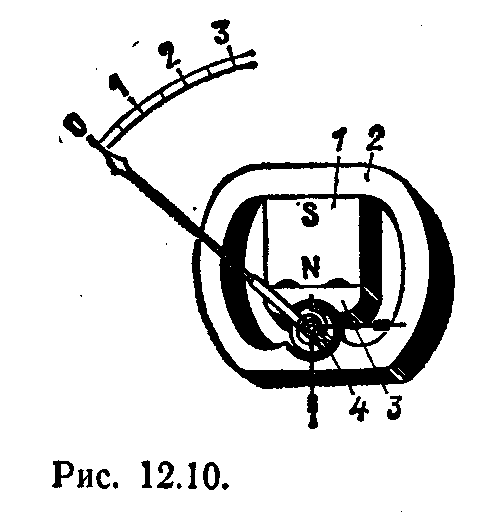 азличают две основные разновидности магнитоэлектрических измерительных механизмов с подвижной катушкой — это механизмы с внешним (внерамочным) и с внутри-рамочным магнитом. азличают две основные разновидности магнитоэлектрических измерительных механизмов с подвижной катушкой — это механизмы с внешним (внерамочным) и с внутри-рамочным магнитом.При внерамочном магните 1 (рис. 12.10) магнитную цепь измерительного механизма образуют магнитопровод 2, полюсные наконечники 3 и цилиндрический сердечник 4, которые изготовляются из магнитно-мягкого относительно легко обрабатываемого материала. Полюсные наконечники и сердечник тщательно механически обрабатываются и точно центрируются. Поэтому в воздушном зазоре между ними в пределах почти всего угла охвата полюсными наконечниками цилиндрического сердечника получается практически однородное радиальное магнитное поле. Таблица 12.2. Условное обозначение принципа действия (системы) прибора   Условное обозначение   Обычный Логометрический Наименование системы и преобразователя измерительный измерительный механизм механизм  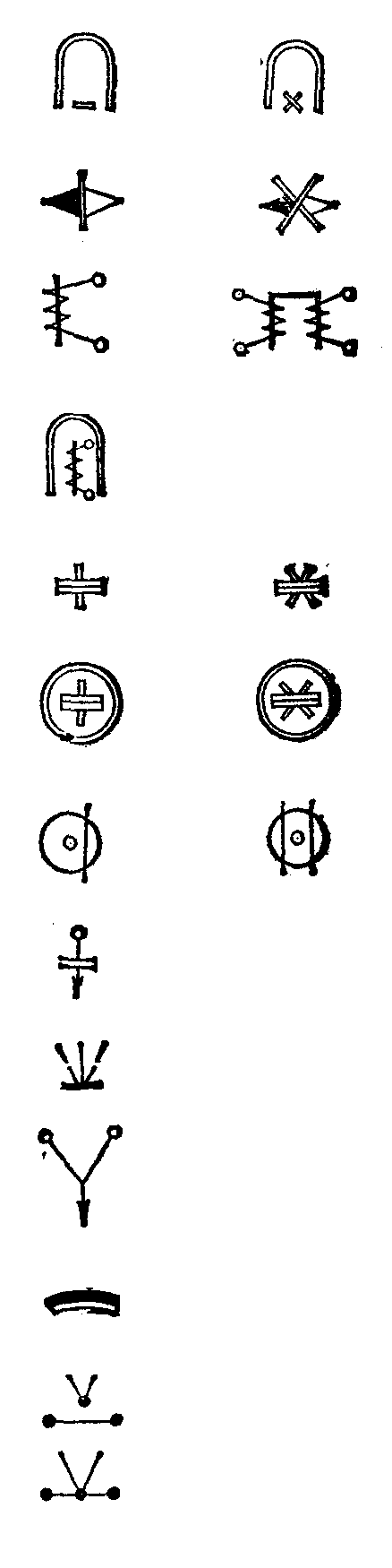 Магнитоэлектрический прибор с подвижной рамкой Магнитоэлектрический прибор с подвижным магнитом Электромагнитный прибор Электромагнитный поляризованный прибор Электродинамический прибор Ферродинамический прибор Индукционный прибор Электростатический прибор Вибрационный прибор (язычковый) Тепловой прибор (с нагреваемой проволокой) Биметаллический прибор Термопреобразователи с неизолированной и изолированной термопарами Преобразователь с полупроводниковым выпрямителем Преобразователь с электромеханическим выпрямителем Электронный преобразователь Вибрационно-импульсный преобразователь  В 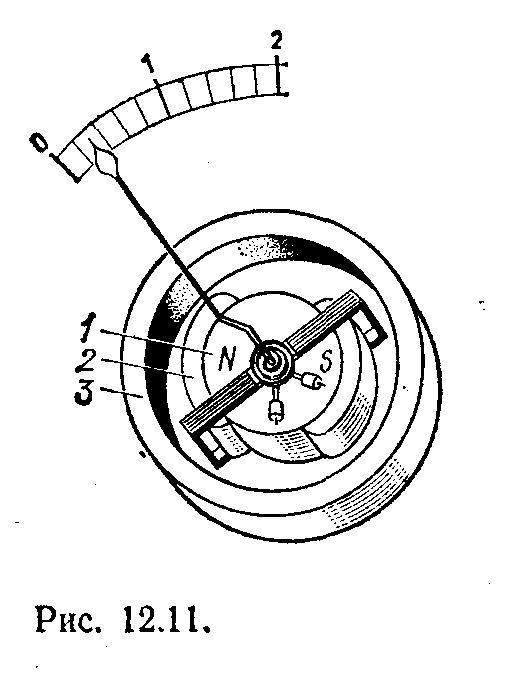 механизмах с внутрирайонным магнитом (рис. 12.11) сердечником является сам магнит 1 и его охватывает цилиндрический магнитопровод 3 из магнитно-мягкого материала. Такая конструкция дает возможность сделать механизм очень малых размеров. Но в этих механизмах трудно получить равномерное поле в воздушном зазоре из-за неодинаковой длины магнитных линий. Для получения более однородного поля у внутрирамочного магнита есть накладки 2 из магнитно-мягкого материала. механизмах с внутрирайонным магнитом (рис. 12.11) сердечником является сам магнит 1 и его охватывает цилиндрический магнитопровод 3 из магнитно-мягкого материала. Такая конструкция дает возможность сделать механизм очень малых размеров. Но в этих механизмах трудно получить равномерное поле в воздушном зазоре из-за неодинаковой длины магнитных линий. Для получения более однородного поля у внутрирамочного магнита есть накладки 2 из магнитно-мягкого материала.В магнитоэлектрическом механизме с однородным полем угол между направлениями вектора магнитной индукции В в воздушном зазоре и активной части проводников с током / подвижной катушки равен 90°. С ледовательно, на каждый из проводников действует электромагнитная сила: где l- длина активной части проводника. Катушка имеет хш витков и укреплена на каркасе диаметром d. Поэтому вращающий момент, действующий на подвижную часть механизма, где S = ld— площадь поперечного сечения катушки. Таким образом, вращающий момент в магнитоэлектрическом приборе прямо пропорционален индукции и току. В узком воздушном промежутке магнитной цепи прибора магнитная индукция равна обычно 0,2 — 0,3 Тл и поле почти равномерное. Следовательно, вращающий момент магнитоэлектрического прибора можно считать прямо пропорциональным току: Мвр = кер1. Так как противодействующий момент, создаваемый спиральными пружинами, прямо пропорционален углу закручивания, т. е. Мпр= = кпрα, то угол поворота катушки прямо пропорционален измеряемому току: где Спр— постоянная прибора («цена деления»). Направление вращающего момента прибора определяется правилом левой руки: пользуясь им, легко убедиться, что подвижная катушка стремится принять положение, при котором направление ее поля совпадает с направлением поля постоянного магнита. Алюминиевая рамка, на которую намотана катушка, служит вместе с тем магнитоиндукционным успокоителем. При изменении направления тока изменяется и направление вращающего момента. При переменном токе на подвижную часть прибора действуют быстро чередующиеся вращающие моменты противоположного направления. Их результирующее действие не изменит положения подвижной части прибора и стрелка останется на нулевом делении шкалы. Постоянный магнит создает сильное магнитное поле (0,2—0,3 Тл) в воздушном зазоре магнитной цепи прибора, и даже при малых значениях измеряемых токов можно получить достаточный вращающий момент. Поэтому магнитоэлектрические приборы весьма чувствительны, в частности гальванометры в большинстве случаев изготовляются магнитоэлектрической системы. Чувствительность прибора позволяет конструктору дать прибору достаточный запас прочности путем уменьшения плотности тока в токоведущих частях; поэтому правильно сконструированный магнитоэлектрический прибор достаточно вынослив к перегрузкам. Этому способствует также линейная зависимость вращающего момента прибора от тока, а не квадратичная, характерная для большинства других систем приборов. Так как в магнитоэлектрических приборах сильное собственное магнитное поле, то внешние магнитные поля мало влияют на их показания. Вследствие высокой чувствительности собственное потребление энергии магнитоэлектрическими механизмами относительно мало. В приборах магнитоэлектрической системы с подвижным магнитом вращающий момент действует на подвижный постоянный магнит, а катушка с измеряемым током неподвижная. Пружины заменяет сила дополнительного постоянного магнита, который устанавливается на корпусе прибора в непосредственной близости от подвижного постоянного магнита. Эти приборы просты по устройству, весьма устойчивы к механическим перегрузкам и дешевы, но точность их мала из-за неоднородности магнитного поля. Они применяются для ориентировочных измерений, например, устанавливаются на щитках автомобилей. Для расширения пределов измерения приборы магнитоэлектрической системы, а также приборы других систем снабжают набором резисторов для делителей измеряемых величин. Резистор, включаемый последовательно с катушкой измерительного механизма, называется добавочным резистором, резистор, который включается параллельно с катушкой измерительного механизма или с ветвью, содержащей катушку и добавочный резистор, называется шунтом. Системы приборов с магнитоэлектрическим измерительным механизмом и преобразователями. Магнитоэлектрический измерительный механизм может быть соединен с тем или иным преобразователем для измерений переменного тока с сохранением достоинств магнитоэлектрического механизма. Однако метрологические недостатки самих преобразователей, главным образом непостоянство их параметров, существенно снижают точность приборов всех систем, образованных соединением магнитоэлектрического механизма е преобразователем. Э 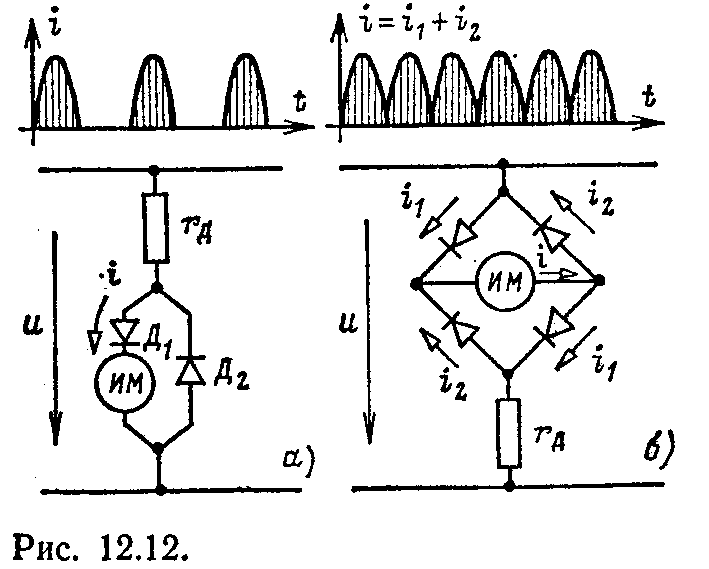 лектроизмерительные приборы выпрямительной системы представляют собой сочетание магнитоэлектрического измерительного механизма с полупроводниковыми диодами, причем применяются как однополупериодные (рис. 12.2, а), так и двухполупериодные (рис. 12.2, б) схемы выпрямления. лектроизмерительные приборы выпрямительной системы представляют собой сочетание магнитоэлектрического измерительного механизма с полупроводниковыми диодами, причем применяются как однополупериодные (рис. 12.2, а), так и двухполупериодные (рис. 12.2, б) схемы выпрямления. При однополупериодной схеме выпрямления ток Iпроходит через измерительный прибор в течение только одной половины каждого периода. Обычно в таких схемах измерительный механизм ИМ и соединенный с ним последовательно диод Д1(рис. 12.2, а) шунтированы вторым диодом Д2, включенным в обратном направлении. Это нужно для того, чтобы не нарушать режим работы контролируемой цепи и чтобы при обратном направлении тока диод Д1не оказался под полным напряжением цепи, которое может вызвать пробой диода. При двухполупериодном выпрямлении (рис. 12.12, б) среднее значение тока i.в измерительном механизме вдвое больше, чем при однополупериодном, что соответственно увеличивает чувствительность схемы. К недостаткам мостовых схем относится то, что в них измеряемое напряжение делится между двумя диодами и при очень низких напряжениях выпрямление существенно ухудшается. Ток в измерительном механизме выпрямительного прибора периодически пульсирует, и так как у подвижной части прибора значительная инерция, то ее отклонение пропорционально среднему за период значению вращающего момента магнитоэлектрического измерительного механизма: Следовательно, выпрямительный прибор измеряет среднее значение тока в цепи. Но для измерений в цепях переменного тока на шкале прибора указываются действующие значения. При синусоидальном токе действующее значение больше среднего в 1,11 раза [(2.16а) и (2.18а)]. При отличии кривой тока от синусоиды возникает соответствующая дополнительная погрешность — погрешность метода измерения. Так как температурный коэффициент прямого и обратного сопротивлений полупроводникового диода отрицателен и относительно велик, то для уменьшения температурных влияний в измерительную цепь выпрямительного прибора включен компенсирующий резистор с сопротивлением rд, у которого положительный температурный коэффициент (рис. 12.12, а и б). Шкала выпрямительного прибора равномерная, кроме начальной сжатой части (10—15 % шкалы), имеющей квадратичный характер вследствие ухудшения выпрямления при низких напряжениях. Точность этих приборов невысока (не выше класса 1,5) из-за значительных погрешностей в результате многочисленных причин: нелинейности и нестабильности вольт-амперной характеристики диодов, ее зависимости от частоты и т. п. Приборы выпрямительной системы часто применяются в качестве многопредельных универсальных приборов. Благодаря переключению шунтов и добавочных резисторов малогабаритный показывающий прибор может иметь до 14 пределов измерений переменного тока и (при выключенных диодах) до 14 пределов измерений постоянного тока. Размеры полупроводниковых диодов весьма малы, и их можно разместить внутри корпуса даже миниатюрного прибора. П 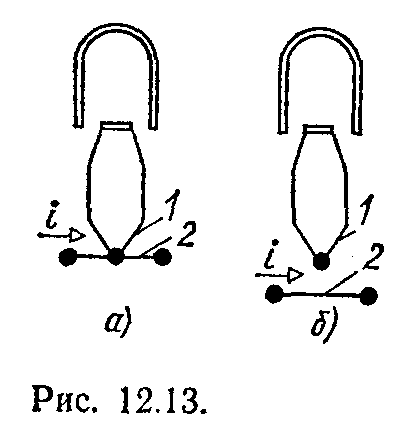 риборы термоэлектрической системы являются соединением магнитоэлектрического измерительного механизма с одним (рис. 12.13) или несколькими термопреобразователями. Термопреобразователь обычно состоит из одной или нескольких термопар / и нагревателя 2, через который проходит измеряемый переменный ток. Можно считать ЭДС термопары пропорциональной разности температур между ее горячим и холодным концами, т. е. перегреву термопары. Перегрев пропорционален (вследствие тепловой инерции) квадрату действующего значения / переменного тока; поэтому и вращающий момент, действующий на подвижную часть измерительного механизма, пропорционален Р, а следовательно, шкала прибора квадратичная. риборы термоэлектрической системы являются соединением магнитоэлектрического измерительного механизма с одним (рис. 12.13) или несколькими термопреобразователями. Термопреобразователь обычно состоит из одной или нескольких термопар / и нагревателя 2, через который проходит измеряемый переменный ток. Можно считать ЭДС термопары пропорциональной разности температур между ее горячим и холодным концами, т. е. перегреву термопары. Перегрев пропорционален (вследствие тепловой инерции) квадрату действующего значения / переменного тока; поэтому и вращающий момент, действующий на подвижную часть измерительного механизма, пропорционален Р, а следовательно, шкала прибора квадратичная.Термопреобразователи делятся на контактные (рис. 12.13, а) и бесконтактные (рис. 12.13, б). В первых термопара приваривается или прижимается к нити нагревателя. Во вторых горячий спай отделен от нагревателя каким-либо изоляционным материалом. Это позволяет получить большую ЭДС посредством последовательного соединения нескольких термопар, но увеличивает тепловую инерцию прибора. Из-за очень низкого КПД термопреобразователя термоэлектрические приборы малочувствительны и должны работать при высокой температуре нагревателя, их собственное потребление велико, а при перегрузке свыше 50 % они разрушаются, так как температура нагревателя возрастает пропорционально квадрату тока. Область измерений, в которой они почти незаменимы, — это измерения переменных токов высокой частоты. Э 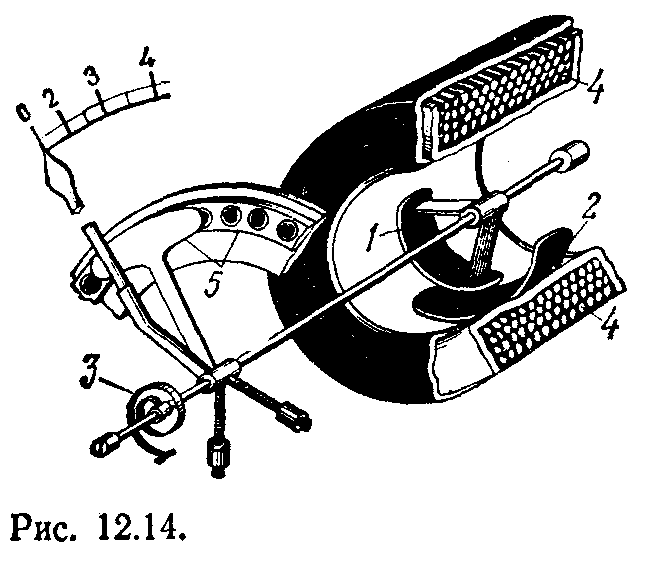 лектромагнитная система. В измерительных механизмах электромагнитной системы вращающий момент обусловлен воздействием магнитного поля измеряемого тока в неподвижной катушке прибора на подвижный ферромагнитный якорь. Механические силы в подобном устройстве стремятся переместить якорь так, чтобы энергия магнитного поля устройства стала возможно большей. В настоящее время широко применяются два типа механизмов этой системы: механизмы с круглой катушкой и механизмы с плоской катушкой. лектромагнитная система. В измерительных механизмах электромагнитной системы вращающий момент обусловлен воздействием магнитного поля измеряемого тока в неподвижной катушке прибора на подвижный ферромагнитный якорь. Механические силы в подобном устройстве стремятся переместить якорь так, чтобы энергия магнитного поля устройства стала возможно большей. В настоящее время широко применяются два типа механизмов этой системы: механизмы с круглой катушкой и механизмы с плоской катушкой.На рис. 12.14 показан механизм с круглой катушкой. В нем внутри круглой катушки 4 находятся подвижный, укрепленный на оси якорь / и неподвижный сердечник 2 из магнитно-мягкого материала. Ток катушки 4 намагничивает оба сердечника, и отталкивание их одноименных полюсов создает момент, поворачивающий сердечник 1. Противодействующий момент создается спиральной пружиной 3. Успокоитель 5 в этом механизме — магнитоиндукцион-ный многополюсный. В 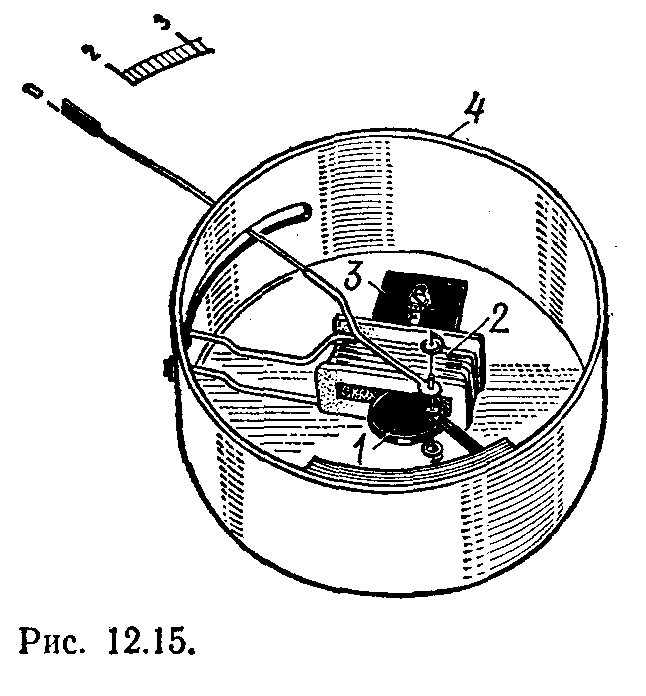 механизме с плоской катушкой (рис. 12.15) якорь / втягивается в катушку 2 с измеряемым током. Для усиления магнитного поля и регулирования вращающего момента служит неподвижный сердечник 3. Противодействующий момент создается спиральной пружиной; успокоитель в этом механизме — воздушный крыльчатый. Для защиты от внешних манитных полей измерительный механизм со всех сторон закрыт ферромагнитным экраном 4 (на рис. 12.15 верхняя крышка экрана снята). механизме с плоской катушкой (рис. 12.15) якорь / втягивается в катушку 2 с измеряемым током. Для усиления магнитного поля и регулирования вращающего момента служит неподвижный сердечник 3. Противодействующий момент создается спиральной пружиной; успокоитель в этом механизме — воздушный крыльчатый. Для защиты от внешних манитных полей измерительный механизм со всех сторон закрыт ферромагнитным экраном 4 (на рис. 12.15 верхняя крышка экрана снята). Электромагнитная сила механизма может быть в общем виде выражена через производную энергии магнитного поля по координате перемещения подвижной части (6.16): F= дWм /дх. При повороте подвижной части на.угол dα и плече Rприложения силы dх = R dαи, следовательно, вращающий момент Энергия магнитного поля катушки электромагнитного прибора равна LI2/2. При перемещении якоря индуктивность Lизменяется, что вызывает изменение энергии магнитного поля электромагнитного механизма при повороте подвижной части. Таким образом, т. е. вращающий момент пропорционален квадрату тока и скорости изменения индуктивности механизма при повороте подвижной части. На вид зависимости dL/dα= f(а) можно воздействовать соответствующим подбором формы якоря и сердечников, их положения в катушке и т. д. Шкала прибора будет равномерной, если Мвр= = I const, т. е. если вращающий момент прямо пропорционален измеряемому току, и, следовательно, I дL/да = const. Выполнение последнего условия неосуществимо для начальной части шкалы, так как из него следует, что при I →0 должно быть дL/да → ∞, а это невыполнимо. Однако относительной равномерности можно добиться для большей части шкалы, кроме начальных делений (одна пятая — одна десятая шкалы), которые сильно сжаты. При изменении направления тока направление момента в приборе не изменяется. Следовательно, можно измерять как постоянные, так и переменные токи. Но при переменном токе на показания прибора могут влиять потери энергии из-за гистерезиса и вихревых токов. В современных приборах со специальными ферромагнитными сердечниками разница показаний незначительна; поэтому по одной и той же шкале можно отсчитывать значения как постоянного, так и переменного токов. Магнитное поле прибора возбуждается самим измеряемым током и относительно слабое, так как большая часть пути магнитного потока проходит в воздухе. По этой причине у измерительного механизма электромагнитной системы малая чувствительность и трудно построить электромагнитный амперметр на малый ток (примерно меньше 0,5 А) или вольтметр на малое напряжение (примерно меньше 10 В). Из-за слабости собственного магнитного поля прибор приходится защищать от внешних магнитных влияний. Для этого применяются ферромагнитные экраны (рис. 12.15) или же измерительные механизмы изготовляются астатическими. Общий принцип астатического устройства измерительной системы заключается в следующем. Число катушек в механизме удваивается, причем обе катушки в равной мере участвуют в образовании вращающего момента, но их собственные магнитные поля имеют противоположные направления. Всякое внешнее однородное магнитное поле, усиливая магнитное поле одной катушки, на столько же ослабляет магнитное поле второй катушки. В результате внешнее магнитное поле не изменяет общий вращающий момент измерительного механизма. Мощность потерь в электромагнитных приборах относительно велика: в катушке амперметра 0,3—1,0 Вт, а у вольтметра нужно прибавить еще мощность потерь в добавочном резисторе, так что суммарная мощность потерь составляет 3—6 Вт. Класс точности электромагнитных приборов обычно не выше 1,5, главным образом, из-за влияния гистерезиса (остаточного намагничивания), что особенно сказывается при измерениях постоянного тока. При изготовлении якоря и сердечника из ферромагнетика с ничтожной коэрцитивной силой, например из пермаллоя, эти погрешности становятся незначительными. У переносных электромагнитных приборов с такими якорем и сердечником удается обеспечить класс точности 0,5 и даже 0,2 как для постоянного, так и для переменного тока (при частоте не выше 1500 Гц). Электромагнитный измерительный механизм обладает рядом ценных свойств. Неподвижную катушку с током легко выполнить е достаточным запасом сечения проводов на случай перегрузок. Приборы этой системы допускают большие перегрузки, дешевы и просты по устройству. Электромагнитными приборами измеряют преимущественно переменные напряжения и токи (невысоких частот). В промышленных установках переменного тока низкой частоты большинство амперметров и вольтметров — приборы электромагнитной системы. |