Горизонтально-ковочная машина. записка ТММ. Горизонтальноковочная машина
 Скачать 0.62 Mb. Скачать 0.62 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНСТВО РФ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Механика» Расчетно-пояснительная запискак расчётно-графической работе потеории машин и механизмов на тему «  Горизонтально-ковочная машина» Горизонтально-ковочная машина»Задание 2 вариант 4 Выполнил: студент гр. 2-НТФ-3, Дюльдин Д.В. Руководитель: Александрова М.Ю. Самара 2018 г. Содержание.Расчетно-пояснительная записка 1 к расчётно-графической работе по 1 теории машин и механизмов 1 Содержание. 2 Задание. 3 Введение. 4 1.Структурный анализ механизма. 4 2.1. Кинематический синтез кривошипно-ползунного механизма. 6 2.2. План положений. 7 2.3. План скоростей и ускорений. 8 2.3.1. План скоростей. 8 2.3.2. План ускорений. 10 2.4. Кинематические диаграммы. 12 3. Силовой расчет. 14 3.1. Обработка индикаторной диаграммы. 14 3.2. Силовой расчёт группы Ассура второго класса. 15 3.2.1.Определение сил инерции. 15 3.2.2.Определение сил тяжести. 16 3.2.3. Определение реакций в кинематических парах. 16 3.3 Силовой расчёт механизма I класса. 18 3.3.1 Определение силы тяжести. 19 3.3.2 Определение реакций в кинематических парах. 19 3.4 Рычаг Жуковского. 20 4. Динамический расчет. 21 4.1. Определение приведенных моментов сил. 21 4.2.Определение кинетической энергии звеньев. 23 4.3.Определение момента инерции маховика. 24 4.4.Определение закона движения звена приведения. 24 4.5.Определение основных параметров маховика. 25 Результаты расчётов по программе ТММ1. 26 Список литературы. 28 Задание.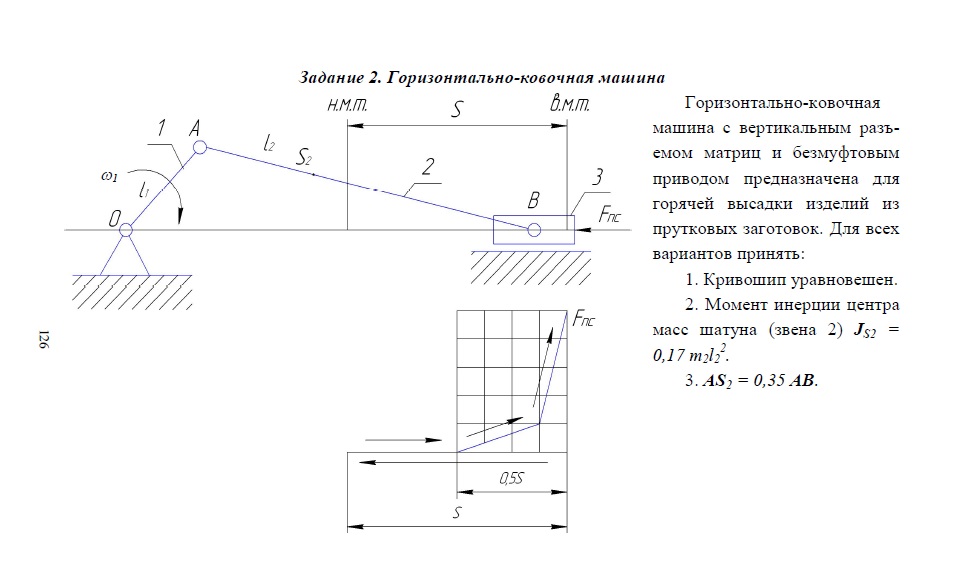 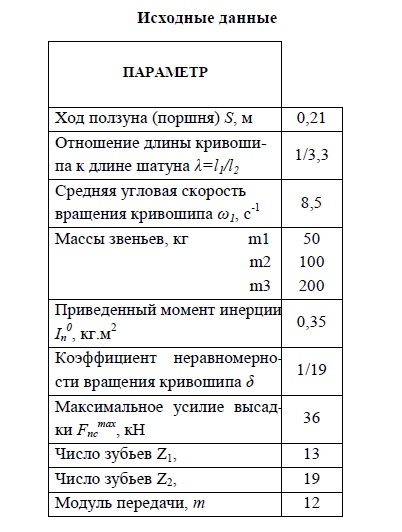 Введение.Целью данной курсовой работы является проектирование и исследование механизма горизонтально-ковочная машина. 1.Структурный анализ механизма.Кривошипно-ползунный механизм состоит из четырех звеньев: 0 – стойка, 1 – кривошип, 2 – шатун, 3 – ползун. Также имеются четыре кинематические пары: I – стойка 0-кривошип OA II – кривошип OA-шатун AB III – шатун AB-ползун B IV – ползун B-стойка 0. I, II и III являются вращательными парами IV – поступательная пара. Все кинематические пары являются низшими, т.е. pнп=4, pвп=0. Степень подвижности механизма определяется по формуле Чебышева: W3n2pнпpвп, (0) где n – число подвижных звеньев, n = 3 Pнп – число низших пар, Pвп – число высших пар. W 3*3-2*4 1. По классификации И.И. Артоболевского данный механизм состоит из механизма I класса стойка 0-кривошип OA и структурной группы II класса второго порядка шатун AB-ползун B. Из этого следует, что механизм является механизмом II класса. 2. Кинематический анализ. 2.1. Кинематический синтез кривошипно-ползунного механизма.Первоочередной задачей проектирования кривошипно-ползунного механизма является его синтез, т. е. определение размеров звеньев по некоторым первоначально заданным параметрам. Ход ползуна S=0,21 м. Эксцентриситет e=0, т.е. опоры механизма находятся на одном уровне. Максимальный угол давления между шатуном и кривошипом max= 18 Угловая скорость карданного вала Передаточное отношение цепной передачи Un Число зубьев колес Z1Z3=13; 19 Отношение длины кривошипа к длине шатуна l1l2 находим из AOB l1l2sin max, (0) sin180,309. Длину кривошипа l1 определяем из рассмотрения двух крайних положений механизма, определяющих ход ползуна S S OB1OB2l1l2l2l12l1, (0) Откуда l1S2, (0) l10,2120,105 м. Длина шатуна: l2l1, (0) l20,3090,346 м Расстояние от точки А до центра масс S2 шатуна l30,35l2, (0) l30,350,346м Угловая скорость кривошипа 18,5 c-1 |