Исследование кривошипношатунного механизма (рис. 1). Для этого
 Скачать 1.3 Mb. Скачать 1.3 Mb.
|

|
5. Силовой расчет механизма Целью силового расчета механизма является определение уравновешивающего момента ТУР, Н*м. Для его определения потребуется найти мгновенные значения сил и моментов сил инерции, а также величины реакций в кинематических парах. Исходными данными являются массы отдельных звеньев mi, моменты инерции звеньев Ii, координаты положений центров масс звеньев и внешняя сила на ползуне Q. 5.1. Определение уравновешивающей силы FУР кинетостатическим методом. В соответствии с третьим законом Ньютона все тела действуют друг на друга с силами равными по модулю и противоположными по направлению. Реакции в звеньях кинематических пар (силы давления одного звена на другое в процессе передачи движения) равны по модулю и обратны по направлению. Условимся обозначать реакции Rlk, где l и k – номера звеньев кинематической пары. Очевидно, что Обозначим стойку цифрой 0, кривошип ОА – цифрой 1, шатун АВ – 2, ползун В – 3. Для силового расчета используется принцип Даламбера (принцип кинетостатики), в соответствии с которым для нахождения реакции в кинематической паре необходимо к внешним силам прибавить силы инерции. Силы трения в данной работе не учитываются. Главный вектор сил инерции звена k, Н: где mk – масса звена k, кг; Стоит отметить, что вектор сил инерции звена направлен противоположно направлению ускорения звена. Главный момент сил инерции звена k, Н*м: где Ik – момент инерции звена k, относительно центральной оси кг*м2; При неизвестных моментах инерции звеньев их можно определить по приблизительной формуле: Находим координаты положений центров масс звеньев. Для кривошипа ОА и шатуна АВ – это точки, лежащие на серединах звеньев Центр масс ползуна (звена 3) совпадает с точкой В. Для определения направления ε2 - углового ускорения звена АВ мысленно переносим в точку В вектор Затем определяем силы инерции и моменты инерции всех звеньев. Центр масс звена 1 (кривошипа ОА) находится на оси вращения звена, поэтому его сила инерции кривошипа равна нулю, т.е. F1=0. Момент сил инерции звена 1 также равен нулю, т.к. кривошип движется равномерно и его угловая скорость постоянна, т.е. ω1= const, и М1=0. Для звена 2 (шатуна АВ) модуль силы инерции: а направление вектора Модуль момента сил инерции звена 2:  , ,а направление момента Звено 3 (ползун или поршень) совершает только поступательное движение, поэтому на него действует только сила инерции Направлена эта сила по траектории движения ползуна в противоположную сторону от направления вектора ускорения Силовой анализ проводят в последовательности, обратной его кинематики. Простейшей кинетостатической цепью обладающей определимостью является структурная группа Ассура. Начинаем с последнего звена. Вычерчиваем группу, состоящую из звена 3 (ползуна), звена 2 (шатуна АВ) и стойки 0 в масштабе. В центрах масс звеньев прикладываем сначала вес звеньев 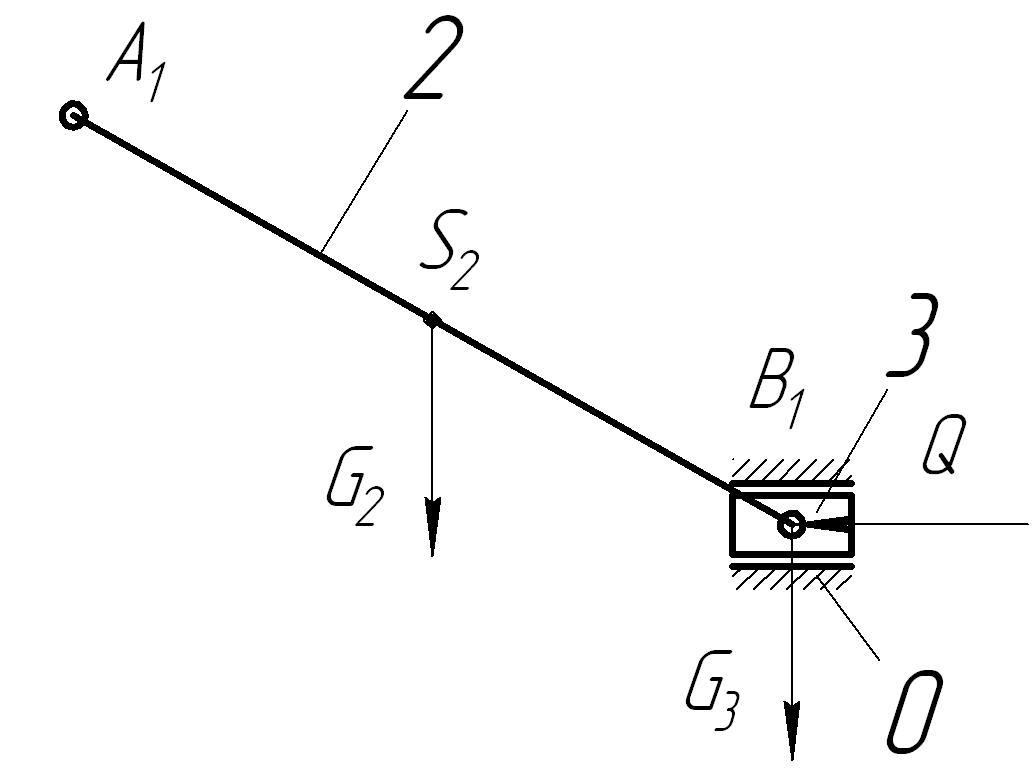 Рис.5. Группа Ассура с приложенными весами и силой сопротивления Затем прикладываем инерционные нагрузки F2, F3 и М2. Последними прикладываем искомые реакции R03, R21 и R23. Направление реакции стойки 0 на ползун 3 перпендикулярно траектории. Реакция звена 2 на звено 1 R21 действует в точке А. Направление ее неизвестно, но ее можно разделить на нормальную Rn21 и тангенциальную Rτ21 составляющие. Направление нормальной составляющейRn21 – параллельно звену 2, а тангенциальной Rτ21 – перпендикулярно звену 2 в произвольную (предварительно) сторону. 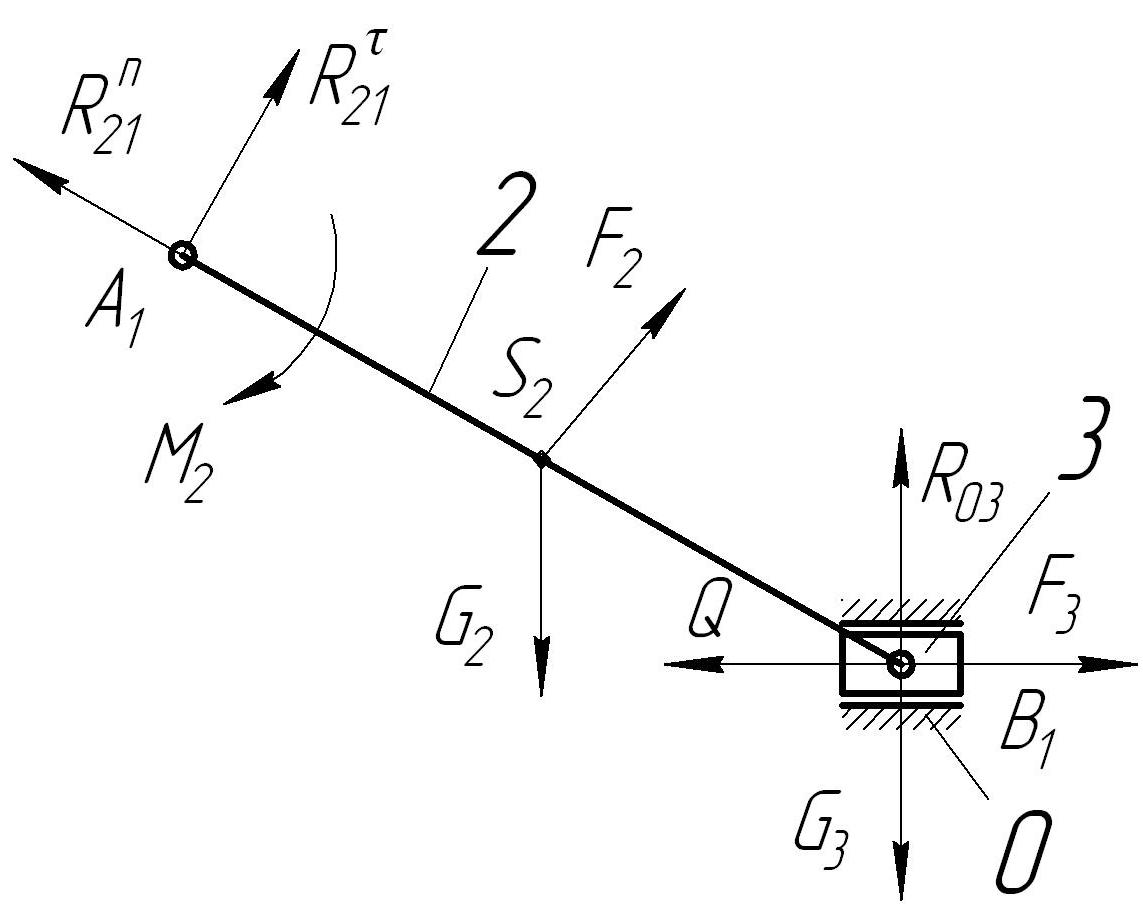 Рис.6. Группа Ассура с приложенными весами, силами и моментом инерции, и реакциями (реакция R23 условно не показана). Т.к. здесь 3 неизвестных вектора ( Условимся, что любая сила или момент, вращающие звено по часовой стрелке, берутся с отрицательным знаком, вращающие против часовой стрелки – с положительным. где hG2 и hF2 – значения плеч от точки В до линии действия векторов G2 и F2 (см. рис 7). 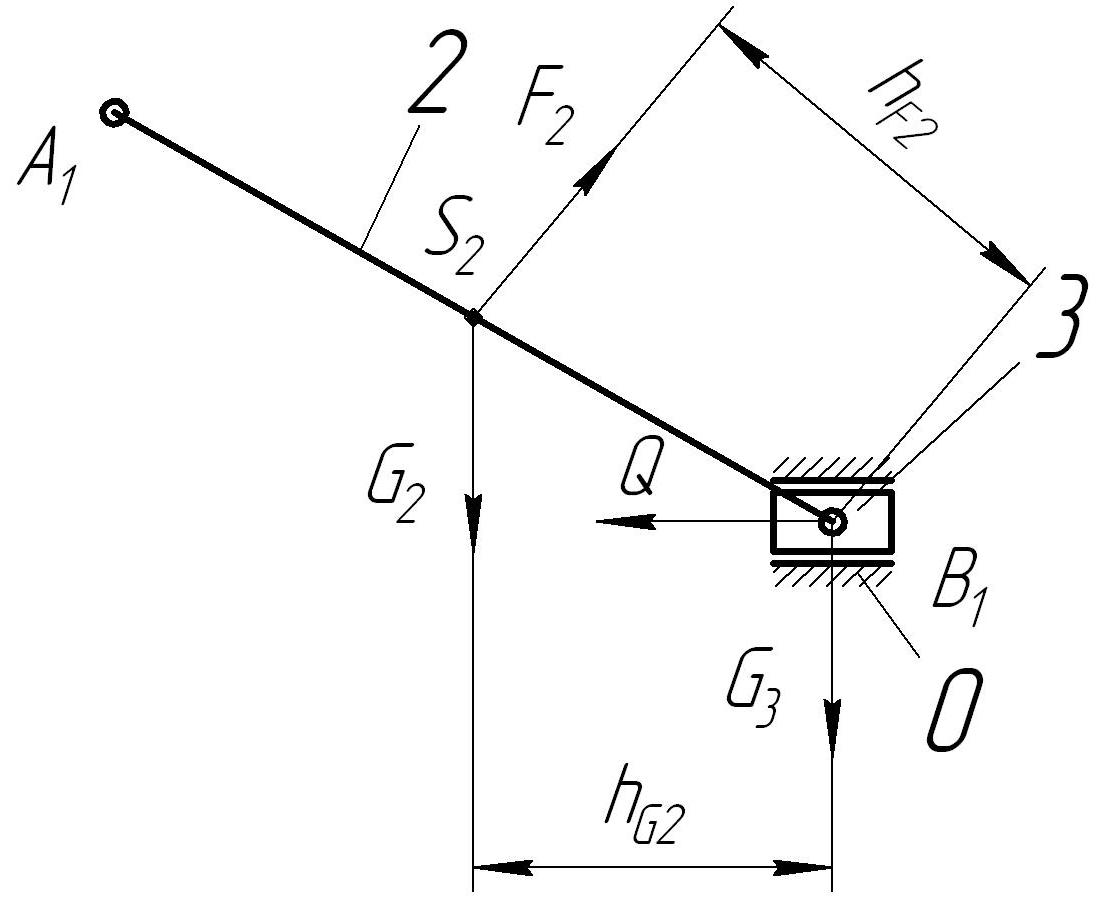 Рис.7. Пояснение к определению плеч hG2 и hF2 Решаем уравнение 11: Так как значение Rτ21 получилось со знаком «минус», то это означает, что предварительно выбранное направление вектора Теперь строим план сил для первой группы. Для этого сначала записываем уравнение всех сил действующих в группе в векторной форме: Затем выбираем масштаб плана сил μf (Н/мм). Из произвольного полюса pf откладываем последовательно в масштабе сначала вектор Реакцию Неизвестную реакцию Строим многоугольник сил (рис.8 б), измеряем длину вектора 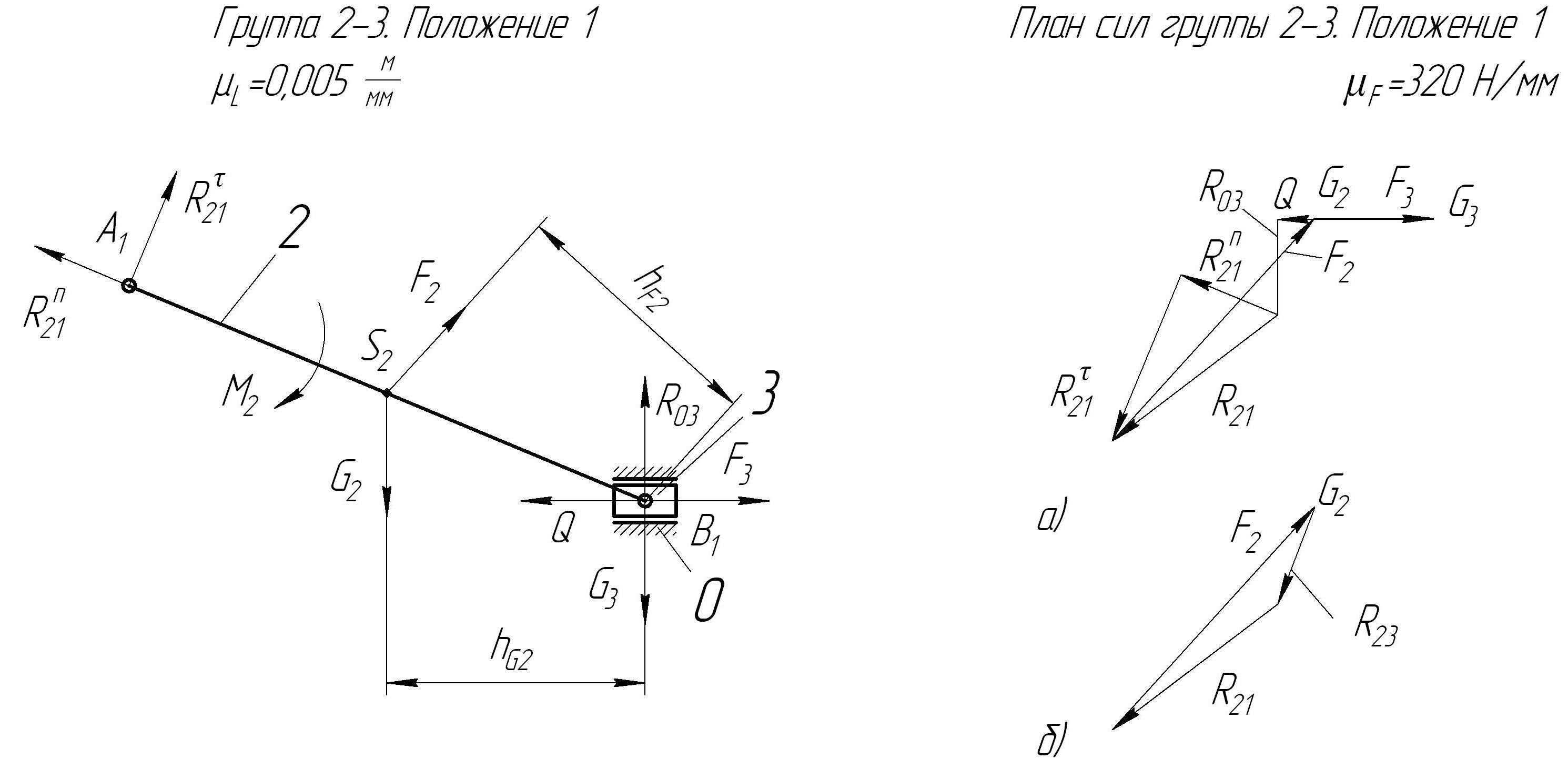 Рис.8. Планы сил для первой группы механизма в первом положении Вторая группа Ассура состоит из двух звеньев: стойки 0 и кривошипа 1. Вычерчиваем группу в том же масштабе, что и предыдущую. В точку А переносим определенную ранее реакцию R12 = R21, но направление вектора Записываем векторное уравнение: Из произвольного полюса pf откладываем векторы 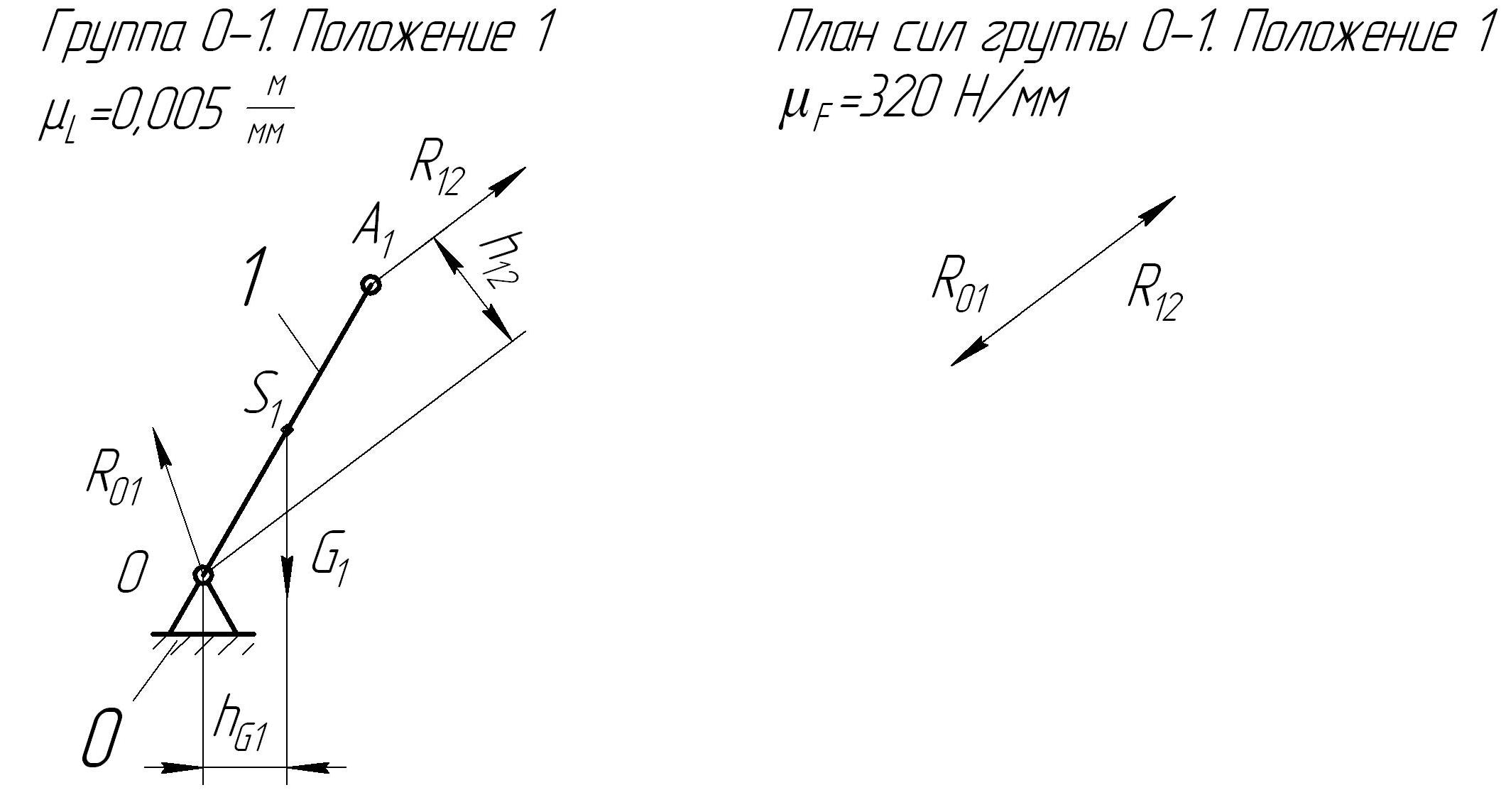 Рис.9. План сил для второй группы механизма в первом положении Измеряем длину вектора Таблица 3 Результаты определения реакций.
Чтобы кривошип находился в равновесии, к нему необходимо приложить внешний уравновешивающий момент. Уравновешивающий момент определяется из соотношения, Н*м: где h21 – плечо уравновешивающей силы, которой является реакция R12, м (см. рис 9). Рассчитанные значения уравновешивающей силы FУР и уравновешивающего момента ТУР для всех пространственных положений механизма сводим в таблицу 4 и определяем максимальные значения уравновешивающей силы FУРmax и уравновешивающего момента ТУРmax |