Экзамен. Классификация и особенности применения По назначению и характеру выполняемых работ системы автоматики разделяют
 Скачать 1.08 Mb. Скачать 1.08 Mb.
|

|
Апериодическое звено. Апериодическим звеном называется простейший динамический элемент системы автоматического управления или его составная часть, имеющая передаточную функцию вида на структурных схемах апериодическое звено изображается следующим образом 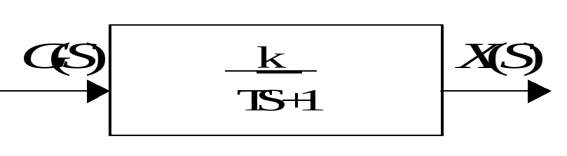 Динамические свойства апериодического звена определяются двумя параметрами: - постоянная времени апериодического звена. Интегрирующее звено. Это звено, у которого скорость изменения выходной величины пропорциональна входной величине. Уравнение идеального интегрирующего звена  . (3.33) . (3.33)Уравнение интегрирующего звена с учетом инерционных свойств  . (3.34) . (3.34)Переходная характеристика интегрирующего звена представлена на рис. 3.17.
Рис. 3.17. Переходная характеристика интегрирующего звена Передаточные функции: – идеального звена – звена с инерцией Примерами интегрирующего звена являются: поршневой ИМ, у которого входная величина – перемещение плунжера золотникового устройства, а выходная – перемещение силового поршня; маломощный асинхронный двигатель с полым ротором; контур R – C, если Колебательное и дифференцирующее звенья. Колебательное звено. Колебательным называется звено, в котором при подаче на вход ступенчатого воздействия выходная величина стремится к установившемуся значению, совершая затухающие колебания. Колебательное звено иначе называют двухъемкостным, т.е. оно должно содержать два элемента, способных запасать энергию или вещество и обмениваться этими запасами через третий элемент. Дифференциальное уравнение колебательного звена: или в операторной форме где Переходная характеристика колебательного звена представлена на рис. 3.14. Следует иметь в виду, что не всякое уравнение второго порядка (3.21) выражает колебательный процесс. Если Если Решение дифференциального уравнения для колебательного звена:  , (3.23) , (3.23)где Величина
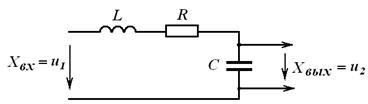
Рис. 3.14. Переходная характеристика колебательного звена Аналитически величину Постоянные времени Частота собственных колебаний звена  . (3.25) . (3.25)Передаточная функция колебательного звена К колебательным звеньям относятся: – электрическая цепь с последовательным соединением R, L и C; – сообщающиеся сосуды; – электродвигатели, способные запасать кинетическую энергию в якоре и электромагнитную в якорной цепи; – механические элементы, обладающие массой, упругостью и вязким трением и др. Например, для электрической цепи с последовательным соединением параметров R, L и C (рис. 3.15), постоянные времени
Рис. 3.15. Электрическая цепь с последовательным соединением параметров R, L и C Дифференцирующее звено. Это звено, у которого выходная величина пропорциональна скорости изменения входной величины. Как всякое реальное звено, дифференцирующее звено имеет инерционные свойства. Дифференциальное уравнение звена (реального): Его решение где Переходный процесс в дифференцирующем звене представлен на рис. 3.16. Если инерционные свойства звена незначительны в сравнении с другими звеньями САР, то величину Передаточная функция реального звена: а идеального звена К дифференцирующим звеньям относятся: тахогенератор (датчик скорости), у которого Дифференцирующие звенья находят широкое применение как составные элементы корректирующих устройств САР.
|