Автоматизация курсовая. Контрольная работа по дисциплине Технические средства судовождения
 Скачать 0.86 Mb. Скачать 0.86 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО РЫБОЛОВСТВУ КАЛИНИНГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ БАЛТИЙСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ РЫБОПРОМЫСЛОВОГО ФЛОТА МОРСКОЙ ИНСТИТУТ КАФЕДРА СУДОВОЖДЕНИЯ И БЕХОПАСНОСТИ МОРЕПЛАВАНИЯ КОНТРОЛЬНАЯ РАБОТА по дисциплине «Технические средства судовождения» (модуль «Автоматизация судовождения») Вариант Выполнил студент Иванов И.И. Шифр Сзу- Проверил доцент, к.т.н. Ермаков С.В. Калининград 2022 ОглавлениеВведение 3 Понятие об устойчивости САР 4 Судовые приёмоиндикаторы ГНСС 7 Заключение 24 Список использованных источников 26 ВведениеКонтрольная работа является одной из форм контроля изучения тем дисциплины. Для эффективности для изучения даны два теоретических вопроса из разных разделов, что позволяет оптимально охватить изучаемый материал. Учебный модуль «Автоматизация судовождения» входит в дисциплину «Технические средства судовождения». Положения, изучаемые в рассматриваемой дисциплине связаны с минимизацией участия судоводителя в выполнении функций судовождения и управления судном посредством применения технических средств. В контрольной работе будут рассмотрены следующие теоретические вопросы: Понятие об устойчивости САР Принципы построения комплексных систем Кроме того, имеется практическая часть в виде решения задач, позволяющая наглядно показать, как технические средства судовождения просчитывают сложные алгоритмы и решают дифференциальные уравнения разных порядков, описывающие аппаратные переходные процессы. Изучаемая дисциплина тесно связана с такими дисциплинами как «Математические основы специальности», «Радиотехника и электроника, «Навигация». Понятие об устойчивости САРВ реальных условиях АСР не может все время оставаться в установившемся режиме, потому что на нѐе все время действуют внешние возмущения, которые стремятся изменить значение регулируемой параметра. Поэтому автоматический регулятор в свою очередь также стремится привести значение регулируемого параметра к заданному. В результате наличия инерционных масс и емкостей переход автоматического регулятора, т. е. всей системы в целом, осуществляется не мгновенно, а спустя некоторое время. Таким образом, в системе возникают переходные процессы, которые зависят от ее параметров. 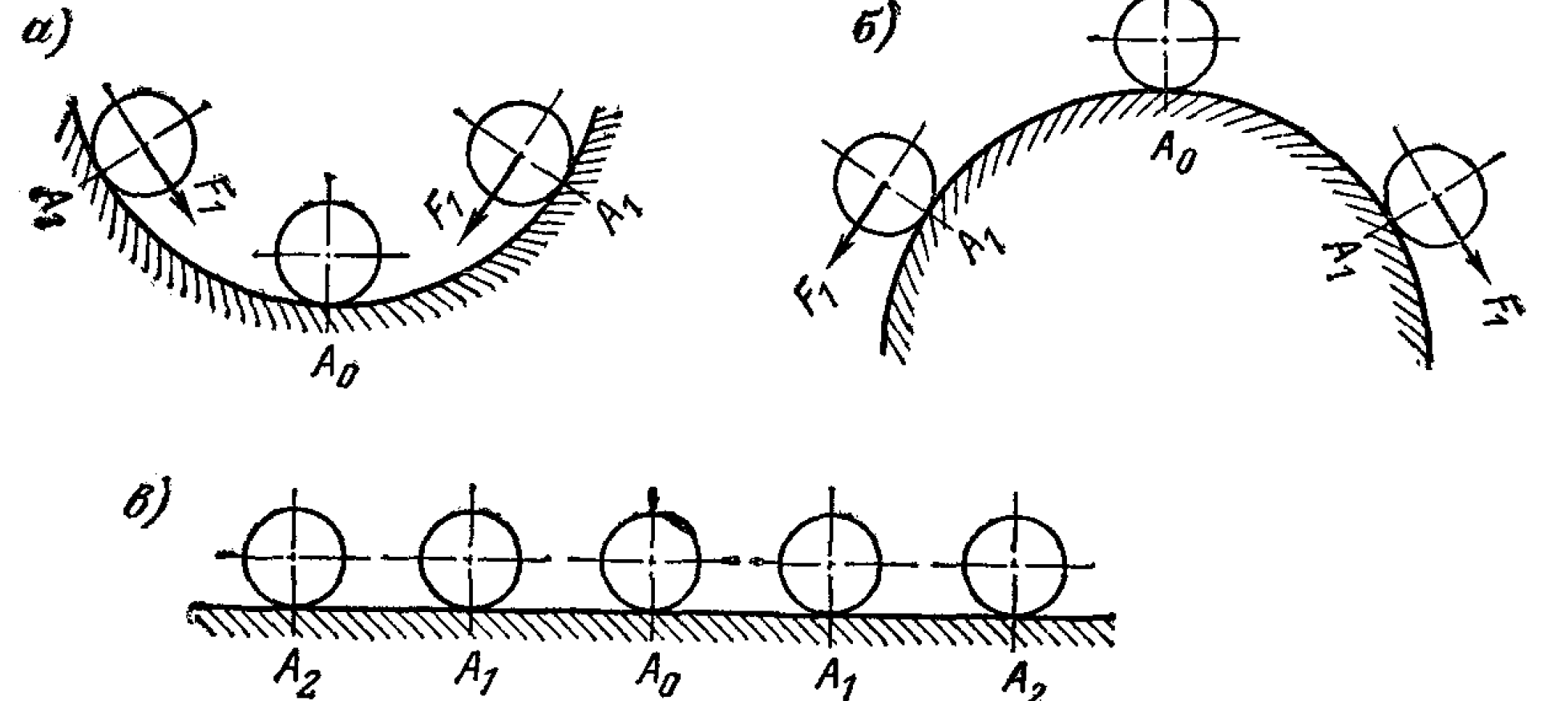 Рисунок 1 — К пояснению равновесного состояния. а — устойчивое; б —неустойчивое; в — безразличное. Следует заметить, что исследование установившегося режима дает возможность решить вопрос о пригодности АСР для проведения какого-либо процесса с заданной точностью. Однако для практического использования этого недостаточно. Система должна быть также устойчивой по отношению к внешним возмущениям. Пригодность любой АСР в первую очередь определяется устойчивостью и приемлемым качеством процесса регулирования. Устойчивостью называется способность системы возвращаться к заданному установившемуся состоянию после приложения или снятия внешнего возмущения. Известно, что каждый из установившихся режимов работы САР представляет собой равновесное состояние. Для решения вопроса, устойчиво ли равновесие какой- либо статической системы, необходимо изучить поведение этой системы при небольших отклонениях от положения равновесия. Различают три вида равновесных состояний: устойчивое, неустойчивое и безразличное. На рис. 1, а приведен пример устойчивого равновесного состояния. При любом малом отклонении шарика от исходного положения А0 влево или вправо в положение А1 появляется сила F1, которая стремится вернуть шарик в исходное положение. Пример неустойчивого равновесного состояния приведен на рис. 1, б. Предположим, что шарик лежит на возвышении. После отклонения его от равновесного состояния А0 шарик не вернется в исходное положение, так как возникающая сила F1стремится еще больше отклонить его от положения равновесия. На рис. 1, в приведен пример безразличного равновесного состояния. Предположим, что шарик находится на плоскости. После отклонения его от равновесного состояния А0 шарик займет одно из новых равновесных состояний (А1 А2, ..., Аn). В этом случае шарик может иметь бесчисленное множество равновесных состояний. Рассмотренные равновесные состояния можно распространить и на САР. В САР применяются автоматические регуляторы, которые обладают устойчивыми установившимися режимами работы. Установившийся режим работы САР является устойчивым, если система, будучи выведенная из состояния равновесия, после снятия возмущения вновь возвращается в устойчивое равновесное состояние. Установившиеся режимы необходимо рассматривать при постоянной нагрузке и настройке. Судовые приёмоиндикаторы ГНССПриемник Furuno GP-150  Рисунок 2 – Внешний вид приемника Furuno GP-150 Furuno GP-150 представляет собой новый GPS приемник, удовлетво-ряющий требованиям IMO MSC. 112(73) и соответствующим стандартам IEC, вступившим в действие с 1 июля 2003 года. Высоконадежная автономная система электронного позиционирования передает информацию на АИС, радар, регистратор данных рейса и т.д [2]. Надежность приемника улучшена за счет применения системы мониторинга с использованием информации от пяти спутников, Receiver Autonomous Integrity Monitoring (RAIM), предоставляющей информацию о степени достоверности тремя уровнями: безопасном, предостережения и небезопасном [2]. Среди режимов дисплея есть Видеопрокладчик, Текст и Широкополосный тракт маршрута, обеспечивающий интуитивное определение курс и пеленг. Система панорамного обзора WAAS повышает точность позиционирования. Дополнительная функция DGPS обеспечивается при встраивании или внешней установке дифференциального приемника. Furuno GP-150 включает в себя антенну и дисплей. Серебристый 6-ти дюймовый яркий LCD дисплей обеспечивает оптимальное наблюдение без затемнения при дневном освещении. Двойная конфигурация с использованием резервной системы обеспечивает дублирование или дистанционное управление, гарантируя работоспособность системы. Точность GPS повышается за счет системы усиления сигнала. С помощью двух методов WAAS и DGPS производится оценка качества сигнала и передача правильной информации пользователям. Приемник Furuno DG-500  Рисунок 3 – Внешний вид приемника DG-500 Отличительные особенности: Оснащен параллельным 18 канальным GPS сенсором повышенной точности. Позволяет быстро определять координаты судна с высокой точностью. Полностью отвечает требованиям резолюции ИМО MSC.112(73) для судов, попадающих под действие конвенции СОЛАС [2]. Сертифицирован в соответствии с требованиями стандартов *IEC, а так же одобрен Wheel Mark для судов под флагом Евросоюза. *IEC 61108–1 Ed.2, IEC 61162–1, IEC 61162–2, IEC 60945 (2002) [3] 5.6–дюймовый ЖК TFT дисплей обладает широким углом обзора и внутренней LED подсветкой для увеличения срока эксплуатации. Позволяет устанавливать три цветовых фона для считывания навигационной информации в различных световых условиях. Позволяет определять координаты с точностью до 0.0001 минуты и быть источником данных для оборудования АИС. Дисплей позволяет выставлять следующие режимы: Навигационные данные с ШИР/ДОЛ, курс и скорость, плоттер с записью 1000 точек, режимы CDI и MOB. Позволяет сохранять до 20 маршрутов по 300 путевых точек в каждом. Специализированная кнопка Человек-за-Бортом MOB сохраняет текущую позицию судна и помогает вернуться судну в точку падения [3]. Сохраняет до 20 реверсивных маршрутов, по 300 путевых точек в каждом, а так же до 2000 особых путевых точек для отметки позиций и мест назначения. Технические характеристики [2]: GPS Приемник: 1575.42 МГц, 18–канальный параллельный, C/A код, совместим с WAAS/MSAT; Точность определения координат * (2–DRMS): 10 метров без DGPS, 5 метров с DGPS; Точность курсоуказания * (HDOP≦4): ±3゚(с SOG 1–17 узлов), ±1゚(с SOG свыше 17 узлов); SOG *Точность (RMS): 0.1 узел; Формат выходных данных: IEC 61162–1 (NMEA–0183); Формат ввода коррекции DGPS: RTCM–104 (Версия 2.0); Дисплей: 5.6” цветной ЖК TFT дисплей, LED–подсветка, разрешение QVGA; Требования по электропитанию: 24 В DC (диапазон рабочего напряжения от 11 до 36 В), потребляемая мощность 15 Вт; Размер корпуса: 248/196WX215/2196HX129D мм с/без установочного кронштейна; Вес: 2 кг с кронштейном; Окружающая среда: класс защиты IEC 60945–2002. Приемник SAAB R4  Рисунок 4 – Внешний вид приемника SAAB R4 Навигационная система Saab R4 GPS и DGPS имеет типовое одобрение согласно требований СОЛАС и других организаций. Система включает RAIM и полностью поддерживает ввод поправки от внешнего приемника DGPS, от внутреннего приемника маяков (R4 DGPS) и ввод дифференциальных спутниковых поправок от таких систем как WAAS и EGNOS. Устройство разработано в соответствии самых жестких требований. Конфигурация поддерживает метод резервирования и полностью дублируется. Прием дифференциальных поправок DGPS посредством АИС может осуществляться в комбинации с системой АИС R4 от компании Saab [2]. Серия оборудования R4 от компании Saab обладает системой самодиагностики и проста в управлении. Система осуществляет непрерывный обсчет RAIM (Receiver Autonomous Integrity Monitoring). Это позволяет вахтенному помощнику устанавливать необходимую точность навигационных данных на любом этапе движения судна. Навигационная система R4 – GPS и DGPS от компании постоянно дает отчет и сигнализацию, если данные выходят за пределы установленных. Стандартные функции и особенности [2]: Отвечает требованиям ИМО; Высококонтрастный универсальный многофункциональный дисплей; Интеграция с АИС, гирокомпасом, лагом, картографической системой и радарами; Большое количество портов ввода и вывода для поддержки интегрированных мостиковых систем; Отображение навигационных предупреждений вещаемых морской маячной службой; Полностью модифицируемое программное обеспечение для поддержки новых функцій; Резервная система DGPS, согласно требованиям DNV AW; Объединенная система Навигация/АИС на одном дисплее, используя приемопередатчик АИС R4; Соединительная коробка с заводским подключением кабелей; Задача 8. В начальный момент времени судно находится в широте 73°15N . Через какой промежуток времени судно, следуя курсом 347° со скоростью 9,5 узлов, выйдет в контрольную точку GOLF инспекторского контроля в норвежской ИЭЗ? В районе плавания действует течение направлением 270° и скоростью 2 узла. Теоретические положения Счисление – это навигационная задача, связанная с определением текущих координат места судна относительно известного начального местоположения по измерениям элементов собственного движения судна. Автоматизация счисления пути судна в географической системе координат сводится к вычислению текущих φс, λс и оценке точности их с помощью цифровых ЭВМ, входящих в состав автоматизированной системы судовождения. В качестве исходных данных в алгоритме счисления используют курс К и скорость судна vc, поступающие от гирокомпаса и лага и исправленные инструментальными поправками. При подключении относительного лага, помимо курса К и скорости по лагу vл, в алгоритме счисления требуются дополнительные исходные данные: направление Km и скорость течения Vm, а также угол дрейфа α. Тогда:  где  – поправки к составляющим скорости судна, которые определяются с помощью позиционных навигационных систем. – поправки к составляющим скорости судна, которые определяются с помощью позиционных навигационных систем.В случае, если какие-либо из этих поправок неизвестны, следует принимать их равными нулю. Текущие счислимые координаты φс2, λс2 находятся по значениям счислимых координат в предыдущий момент времени φс1, λс1 по известными рекуррентным соотношениям, учитывающим сфероидность Земли:  где VN и VE – составляющие вектора скорости соответственно по меридиану и параллели;  – средняя широта. – средняя широта.Решение задачи: Широта точки GOLD:73о30N Искомый промежуток времени найдём из выражения:  Ответ:  Задача 58. Координаты начальной точки плавания  . Определить курс пересечения ортодромией экватора, если долгота точки пересечения равна . Определить курс пересечения ортодромией экватора, если долгота точки пересечения равна  . .Теоретические положения Одна из основных задач в мореплавании заключается в оптимизации путей судов . На шаре линией кратчайшего расстояния является дуга большого круга (ДБК), которую называют ортодромией. Ортодромия — это замкнутая кривая и на практике при всех её преимуществах она неудобна, т.к. для удержания на ней судна пришлось бы непрерывно изменять его курс. Для использования на практике удобна линия пути, которая пересекает все меридианы под одним и тем же углом. Такая линия называется локсодромией. Она представляет собой логарифмическую спираль – линию двоякой кривизны, которая непрерывно стремится к полюсу. В практике судовождения широко используются и ортодромия, и локсодромия. Возникает необходимость переходить от ортодромических направлений к локсодромическим и наоборот. Плавание по ортодромии на большие расстояния при большой разности долгот позволяет экономить судну время и топливо. Однако по уже сказанной причине, на практике плавание по ортодромии не представляется возможным. Поэтому, как правило, при плавании по ортодромии рассчитывают последовательные частные локсодромические курсы, являющиеся направлением хорд – прямых на карте, соединяющих две точки ортодромии [9, стр. 68]. Количество хорд является компромиссом между эффективностью плавания по ортодромии и числом дополнительных маневров. К основным параметрам ДБК, определяемым микро-ЭВМ спутниковых СНА разных типов, относятся: курс в начальной точке и ортодромическое расстояние; координаты промежуточных точек ДБК, включая широты и долготу вертекса; локсодромические курсы и расстояния на участках плавания между промежуточными точками ДБК, а также время на переход между этими точками. Алгоритм расчета параметров ДБК основан на решении уравнения ортодромии, полученного из сферического треугольника. Длинна ортодромии между точками и длинна локсодромии рассчитываются по формулам:
где Клок – локсодромический курс, определяемый из выражения:
В знаменателе формулы стоит РМЧ – разность меридиональных частей двух точек, при этом меридиональная часть каждой из них рассчитывается:
где е2 = 0,0066934. Для определения значения широты i промежуточных точек ортодромии предварительно необходимо вычислить долготу 0 пересечения ортодромией экватора и курс K0 этого пересечения:
тогда значение широты i можно будет вычислить по формуле:
Решение задачи: Курс пересечения ортодромией экватора определяется как:  Ответ:  Задача 108 Судно начало поворот с углом перекладки 10°, за 40 с изменив свой курс на 13°. Определить постоянную времени судна, приняв К = 0,04с-1. Задачу решить графически. Задачу решить графически. Теоретическое введение. Переходная функция показывает изменение во времени выходных переменных объекта при ступенчатом изменении одной из входных переменных. Применительно к судну рассматриваются изменение угла курса  и угловой скорости поворота и угловой скорости поворота  судна при ступенчатом изменении угла перекладки руля судна при ступенчатом изменении угла перекладки руля  В конечном выводе формулы (1) и (2) примут вид: В конечном выводе формулы (1) и (2) примут вид:  (1) (1) (2) (2)Решение задачи: Построим переходную функцию при известных изменении курса и моменте времени: 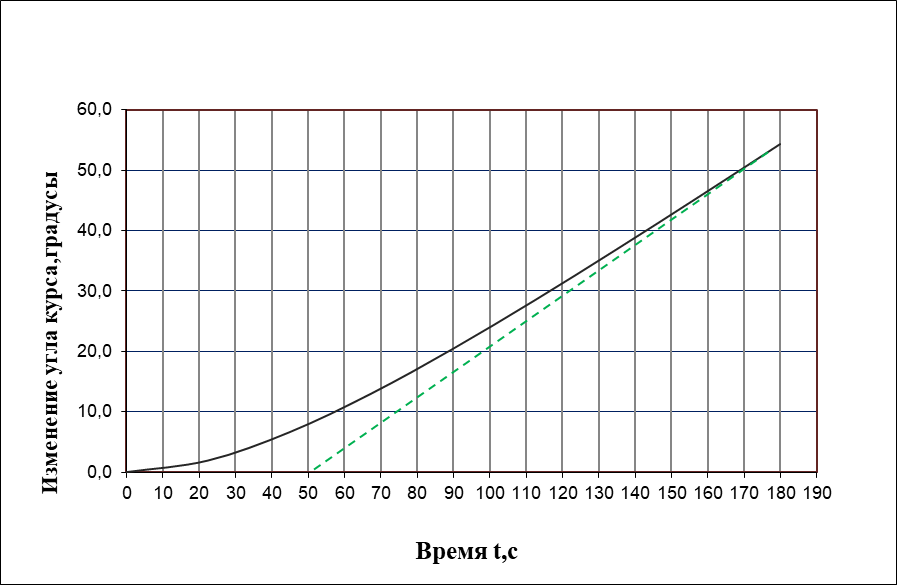 Рисунок 5 – График зависимости угла изменения курса от времени  Проведя касательную к графику функции в точке бесконечность, определим постоянную времени судна, равную 50с Ответ: 50с Задача 148. В задаче заданы коэффициенты k , k2, k7 , определяющие работу системы автоматического регулирования курса судна, постоянная Тс времени судна и постоянная Тр времени регулятора. Используя критерий Гурвица, определить устойчивость системы. В случае если система окажется неустойчивой, подобрать новые значения коэффициентов k2 и k7 , для которых система будет устойчива. Для проверки использовать тот же критерий. Принять k1 =1,0. Теоретические положения Знаменатель передаточной функции замкнутой системы характеризует свободное ее движение, а числитель определяет влияние внешнего воздействия на поведение системы при вынужденном движении. Для оценки устойчивости системы достаточно рассмотреть корни характеристического уравнения, которые получаются путем приравнивания к нулю знаменателя переда- точной функции W . Вводя новые обозначения, характеристическое уравнение запишем в виде:  (1) (1)где  (2) (2) (3) (3) (4) (4) (5) (5)Решение задачи:  Подберём новые коэффициенты k2 и k7:  Ответ: Замкнутая система САР с заданными параметрами по критерию Гурвица является устойчивой.  Задача 187 В задаче 187 по исходным данным задачи 147 определить устойчивость системы автоматического регулирования курса судна, используя критерий Найквиста. В случае если система окажется неустойчивой, подобрать новые значения коэффициентов k2 и k7, для которых система будет устойчива. Для проверки использовать тот же критерий. Теоретические положения Критерий Найквиста – частотный критерий, позволяющий по виду амплитудно-фазовой частотной характеристики (АФЧХ) разомкнутой системы оценить устойчивость работы замкнутой системы. При использовании этого критерия условие устойчивости замкнутой САР сводится к требованию, чтобы АФЧХ при увеличении частоты от 0 до +Ґ разомкнутой системы, находящейся в устойчивом состоянии, не охватывало бы точку (-1;i 0). Решение: В характеристическом уравнении сделаем замену  и получим функцию вида : и получим функцию вида : Рассчитываем АФЧХ разомкнутой САР курса судна (таблица 1)  Таблица 1 – Расчёт АФЧХ разомкнутой САР курса судна  Построим на комплексной плоскости АФЧХ разомкнутой САР курса судна, рассчитанную по таблице 1 для заданных исходных данных. В итоге получаем, что кривая не охватывает точку (-1; i·0). Следовательно, исследуемая замкнутая САР курса судна устойчива. 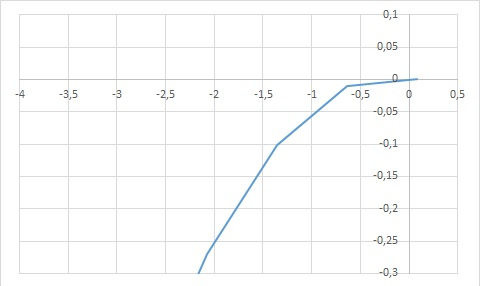 Рисунок 6 – АФЧХ устойчивой САР курса судна Ответ: Замкнутая система САР с заданными параметрами по критерию Найквиста является устойчивой. Задача 228 С каждым оборотом антенны РЛС система автоматической радиолокационной прокладки по измеренным значениям пеленга и дистанции вычисляет прямоугольные координаты судна-цели. Результаты этих вычислений представлены в таблице. Определить сглаженные значения прямоугольных координат на последний момент времени, если коэффициент экспоненци- ального сглаживания равен 0,05. Теоретическое введение Обработка сигналов, поступающих с выхода радиолокационного приёмника (первичная обработка информации), выполняется в несколько последовательных этапов [2]: дискретизация и квантование сигналов; селектирование сигнала; автоматическое обнаружение сигнала; опознавание сигналов; определение координат объекта. Для выделения полезного отражённого сигнала на фоне помех используются два его свойства: во-первых, амплитуды импульсов полезного сигнала в среднем больше, чем амплитуды тшумовых выбросов, и, во-вторых, отраженный от цели сигнал представляет собой пачку (серию) импульсов, разделенных равными интервалами повторения посылок. При ширине диаграммы направленности , частоте следования посылок f и времени оборота антенны Тоб точечная цель отразит пачку импульсов, число которых равно:  Шумовые импульсы не могут образовать подобную пачку импульсов с такими же равными интервалами между ними. Для обнаружения пачки импульсов применяются цифровые счетчики числа импульсов между началом и концом пачки. Если число импульсов в пачке превышает некоторое число порога, то принимается решение об обнаружении цели. Решение задачи: 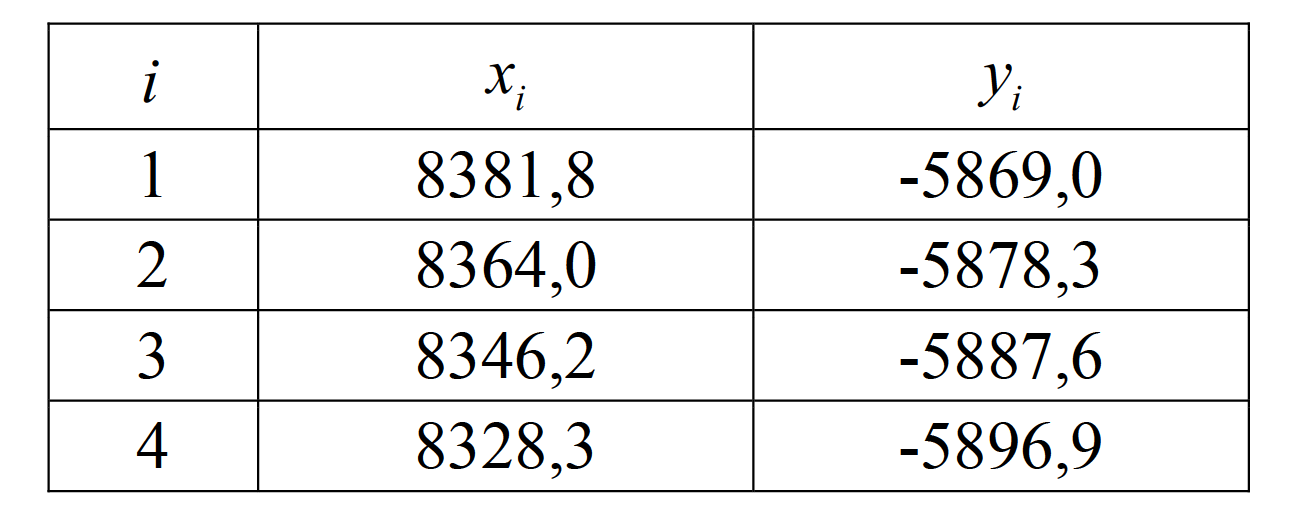 Сглаженные значения координат можно определить из выражения:  Ответ:  Заключение При написании контрольной работы я познакомился с теорией автоматизации судовождения и как она используется на практике. При изучении предмета я пришёл к выводу о тесной взаимосвязи технических средств судовождения с высшей математикой. Так, например, с помощью систем автоматического управления и регулирования во многом упрощает и работу судоводителя и освобождает от утомительной вахты на руле, приводит к сокращению численности экипажа, обеспечивает снижение судовых эксплуатационных расходов за счет уменьшения потерь эксплуатационной скорости судна и снижения расхода топлива на единицу пройденного расстояния. Так, при правильной настройке авторулевого потери эксплуатационной скорости хода могут быть снижены на 2-3% при постоянной мощности двигателя Наибольший интерес у меня вызвало решение задачи № 58, на которое я затратил значительное время. В то же время расчётные комплексы на судне выполняют эти задачи за секунды, что наглядно показывает пользу современных автоматизированных систем управления. Особенностью подобных задач является то, что их можно решить различными способами. Я использовал таблицы МТ-75 и МТ-2000 для решения этой задачи. Кроме того, я получил понятие о критериях устойчивости. В контрольной работе было предложено дать оценку устойчивости одной системы по критерию Найквиста. В целом, я положительно оцениваю знания, полученные в ходе выполнения данной работы Список использованных источниковА.А. Дубков, Н.В. Агудов. Преобразование Лапласа: учебно-методическое пособие – Нижний Новгород: Нижегородский госуниверситет, 2016. – 36 с. Густав Дёч. Руководство к практическому применению преобразования Лапласа и Z-преобразовния. – М.: Наука, 1971. – 288 с. Г.Н. Шарлай. Управление морским судном: учебное пособие. - Владивосток: Мор. гос. ун-т, 2015. – 566 с. Л.Л. Вагущенко, А.Л. Вагущенко. Поддержка решений по расхождению с судами. – Одесса: Феникс, 2010. – 229 с. Ю.А. Песков. Пособие по использованию САРП. – М.:Транспорт, 1955. – 224 с. В.А. Орлов. Автоматизация промыслового судовождения. – М.: Агропромиздат, 1989. – 296 с. К.А. Емец. Мореходные таблицы (МТ-2000). – С. Петербург: ЦКФ ВМФ, 2002. – 577 с. Дмитриев В.И., Григорян В.Л., Катенин В.А. Навигация и лоция: учебник для вузов: под ред. В.И. Дмитриева. – М.: ИКЦ Академкнига, 2004. – 471 с. Бондарев В.А., Ермаков С.В. Основы разработки и применения вычислительных алгоритмов в судовождении: сборник лабораторных работ по курсу «Автоматизация судовождения». – Калининград: Изд-во БГАРФ, 2014. – 124 с. Задачник по навигации и лоции: учеб. пособие для вузов морск. Трансп.: под ред. М.И. Гаврюка. – М.: Транспорт, 1984. – 312 с. Мореходные таблицы (МТ-75). – С. Петербург: ЦКФ ВМФ, 1975. – 324 с. Родионов А.И., Сазонов А.Е. Автоматизация судовождения. – М.: Транспорт, 1992. – 192 с. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. – СПБ.: Профессия, 2003. – 750 с. Бондарев В.А. Критерий устойчивости систем автоматического регулирования курса судна: учебное пособие. – Калининград: БГАРФ, 2016. – 65 с. |



 ,
, ,
,
 ,
,