Экспертиза дорожно-транспортных происшествий. Вопросы Экспертиза дорожно-транспортных происшествий. Контрольные вопросы по дисциплине Экспертиза дорожнотранспортных происшествий
 Скачать 211.7 Kb. Скачать 211.7 Kb.
|

|
Раздел 10 Какие данные необходимы с места ДТП с наездом на пешехода? Время терпеливого ожидания зависит от цели и срочности, адаптации, а также от скорости транспортного потока. Время терпеливого ожидания зависит от цели и срочности, адаптации, а также от скорости транспортного потока. Темп движения пешехода. Траектория перехода пешехода. Ширины проезжей части и характеристик транспортного потока (скорость, интервалы, интенсивность, тип ТС). Какие вопросы обычно выносятся на экспертизу по наезду на пешехода? Перед экспертами и специалистами ставят и, если и не ставят, то им в любом случае приходится рассматривать и отвечать на следующие вопросы: 1. Как располагался пешеход в момент наезда относительно ТС и координат проезжей части? 2. Какова могла быть начальная скорость движения автомобиля с учетом следов скольжения? 3. Каков мог быть остановочный путь ТС в данных условиях? 4. Какое время мог затратить пешеход на движение с момента опасности до момента наезда? 5. На каком удалении находилось ТС от места наезда в момент объективной опасности для движения? 6. Имел ли водитель техническую возможность предотвратить наезд? 7. Какими положениями ПДД должны были руководствоваться пешеход и водитель в данной ситуации и какие несоответствия ПДД в их действиях с технической стороны имеют причинную связь с фактом ДТП и его последствиями? Какова последовательность определения технической возможности предотвращения наезда ТС на пешехода? Для решения главного вопроса о наличии или отсутствии у водителя технической возможности предотвратить наезд своевременным торможением предварительно сравнивают время движения пешехода в опасной зоне с суммарным временем до начала торможения ТС: tП ↔ (t1 + t2 + 0,5t3) . Если время tП получается меньше суммы времени реакции водителя, времени запаздывания привода и нарастания замедления, т.е.суммарного времени, то есть все основания сделать вывод об отсутствии у водителя технической возможности предотвратить наезд в связи с созданием пешеходом опасности за очень короткое время, так как действиями пешехода фактически сразу была создана аварийная обстановка. При tп ↔ (t1 + t2 + 0,5t3) производится сравнение остановочного пути ТС с расстоянием его удаления от места наезда в момент опасности. Если Sо Для этого сначала находят время движения ТС до линии движения пешехода при своевременном торможении: tа = t1 + t2 + 0,5t3 +Vо/jТ -  . .По этому времени находится положение пешехода в момент подхода автомобиля к месту наезда. Может оказаться, что пешеход в этот момент уже успевает покинуть полосу движения автомобиля с безопасным боковым интервалом: И=0,0014LVО , где L – длина автомобиля, м; VО – скорость автомобиля, км/ч. Каким образом значения основных параметров влияют на выводы эксперта, каков главный принцип получения обоснованного категоричного вывода? Чтобы не допустить ошибки, категоричный вывод о возможности предотвращения ДТП водителем можно сделать только в том случае, когда в расчет введены наиболее благоприятные для водителя предельные значения параметров. Рассмотрим это на примере исследования наезда на пешехода в процессе торможения ТС, когда чаще всего сравнивают значение остановочного пути с расстоянием удаления: SО ↔ SУ: ( t1 + t2 + 0,5t3)Vo + Vo2/2jТ ↔ Vo*Sп / Vп – (Vо – Vн)2/2jТ . По этим выражениям можно видеть, что при уменьшении замедления однозначно возрастает остановочный путь ТС и уменьшается его удаление от места наезда. Это делает более вероятным вывод об отсутствии у водителя технической возможности предотвратить наезд. Такое же влияние на вывод оказывает увеличение скорости движения пешехода и уменьшение его пути в зоне опасности, так как при прочих равных условиях сокращается расстояние удаления. Увеличение начальной скорости движения ТС при прочих равных условиях в большей мере влияет на увеличение остановочного пути, нежели на рост удаления. Поэтому надежный вывод о наличии технической возможности у водителя предотвратить ДТП своевременным торможением можно сделать только в случае, если принять в расчетах минимально возможное в данных условиях замедление ТС (коэффициент сцепления), максимальную скорость движения пешехода (или минимальный путь в зоне опасности), а также максимальное значение скорости из предлагаемого следствием диапазона. Следовательно, в расчет принимаются такие значения параметров, которые обратным образом влияют на данный вывод. Это главный принцип получения технически обоснованных категоричных выводов. Какие значения безопасных скоростей чаще всего определяются в исследованиях наезда на пешеходов? Пять значений безопасных скоростей V1 ,V2 , V3 , V4 , V5 . V1 соответствует условию остановки автомобиля экстренным торможением до места наезда (линии движения пешехода): Sо= Sу , T*V+V2 /2jт = Sу . Из этого уравнения получаем значение первой безопасной скорости: V1 = T*jт *(  -1 -1V2 – получается из условия опережения автомобилем пешехода, т.е. пешеход не успевает дойти до полосы автомобиля: V (Sу+ L)* Vп /Yп V3 – скорость, при которой пешеход успевает покинуть полосу автомобиля до подхода последнего: V3= Sу *Vп/( Yп+ B). V4 – скорость, при которой автомобиль успевает пропустить пешехода, применив экстренное торможение: V4 = V3 + (tп- Т2)*jт/2 tп V5 – скорость, при которой автомобиль опережает пешехода, даже применив экстренное торможение: V5 = V2+  Раздел 11 1. Какие конфликты возникают при движении ТС на повороте? Какие вопросы могут быть поставлены для разрешения экспертам по ДТП на повороте? Конфликты часто возникают на правом повороте автопоезда, когда с правой стороны его оставляется определенная ширина проезжей части, чтобы исключить наезд на бордюр задним колесом прицепа (полуприцепа). Зимой зачастую все покрывается снегом и смещением на обочину “расширяют” проезжую часть с увеличением радиуса. В это “расширение” и стремятся проехать спешащие водители легковых автомобилей. И они попадают в “слепую зону”, их в правое наружное зеркало заднего вида водитель тягача не может обнаружить. В процессе поворота происходит касательное столкновение, которое водитель автопоезда может не почувствовать и продолжить движение, пока кто-нибудь его не остановит. За это время осколки могут быть преднамеренно смещены от края проезжей части и создается версия о сложном движении автопоезда сначала влево, а затем неожиданно вправо без включения сигналов поворота для обвинения водителя автопоезда в нарушении пп. 8.1, 8.5, 8.6 ПДД о сигналах маневра, его безопасности, о повороте не из крайнего правого положения и его движении не у края проезжей части. При левом повороте на дорогу с малой шириной проезжей части дороги и подходящей с левой стороны под углом, меньшим 90, габаритное ТС, особенно автопоезд, не может в принципе выполнить левый поворот без выезда на сторону встречного движения по требованию п. 8.6 ПДД. А подходящие с левой стороны ТС часто останавливаются непосредственно у линии пересечения проезжих частей. Происходит столкновение либо со стоящим ТС, либо с подкатывающимся к этой линии. В последнем же случае возникает конфликт: невыполнение водителем поворачивающего ТС требования п.8.6 ПДД, а водитель подходящего слева ТС должен был выполнить пп. 13.8 и 13.11 ПДД – уступить дорогу поворачивающему ТС своевременным торможением. Для этого придется найти начальную скорость подходящего с левой стороны ТС и скорость в момент столкновения. Часто эксперту приходится отвечать на вопросы о соответствии данного пересечения вообще условиям безопасности. Конфликт из-за расширения полосы движения может возникать на криволинейных участках дорог при выполнении опережения или обгона автопоездов. Построением масштабной схемы можно выявить ошибку водителя опережающего или обгоняющего ТС по выполнению им требования п. 9.10 ПДД о безопасном боковом интервале. Как рассчитывается маневр входа ТС в левый поворот при экспертном исследовании конфликта с обгоняющим ТС (показать на схеме)? 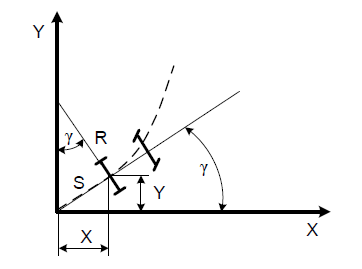 С места ДТП необходима информация о кривизне дороги. Минимальный радиус закругления дороги может быть определен по измерению на месте ДТП длины хорды L и высоты сегмента h: R=(L2+4h2)/8h или R=[(L/2)2 + h2]/2h . Переход от прямолинейного движения ТС к повороту реально происходит с увеличением кривизны траектории и уменьшением радиуса по мере поворота управляемых колес. При условии поворота управляемых колес водителем с постоянной угловой скоростью и движения ТС с постоянной скоростью V приращение курсового угла будет пропорционально увеличению пути по дуге S (см. рис. 12): d γ = ds / R = V*dt / R. Какие допущения принимаются при расчете маневра «смена полосы движения», и чем ограничивается интенсивность выполнения маневров вообще? В целом же расчеты маневрирования «смена полосы движения», ТС по сравнению с расчетами процесса торможения являются менее точными и определенными как из-за недостаточной для целей практики изученности сложных процессов управляемости и устойчивости ТС, так и из-за неопределенных действий водителя как оператора. Поэтому имеется настоятельная необходимость исследований управляемого движения различных транспортных средств в эксплуатационном режиме и в условиях опасных дорожных ситуаций. В настоящее время имеются разработанные конструкции измерительных комплексов с записью параметров движения ТС (аналогии с “черным ящиком” в авиации). Внедрение этого позволит получить достоверную информацию о движении ТС непосредственно перед и во время ДТП. Проведение следственного эксперимента при расследовании ДТП с маневрированием требует тщательной предварительной проработки и обязательного участия квалифицированного специалиста. На практике часто маневр сопровождается торможением, и если не произошло заноса, то интенсивность поворота управляемых колес и кривизна траектории ограничиваются остаточным для маневра сцеплением: 𝞿y ≤  Какова последовательность определения возможности предотвращения ДТП маневром «смена полосы движения»? Для предотвращения ДТП в экстренном режиме выполняется обычно маневр «смена полосы движения». При этом маневре водитель поворачивает рулевое колесо в одну сторону, набирает определенное смещение ТС, а затем поворачивает рулевое колесо с переходом через нейтральное положение в другую сторону с последующим возвращением снова в нейтральное положение для продолжения прямолинейного движения, но уже по другой полосе проезжей части дороги. За время t1 (рис. 13) осуществляется маневр «вход в поворот», а при возвращении управляемых колес в нейтральное положение (=0, точка С) осуществляется маневр «вход-выход», после которого ТС будет продолжать движение по постоянному радиусу. Ограниченное пространство по ширине дороги обуславливает выполнение этих маневров в обратную сторону, и в точке Е автомобиль продолжает вновь движение вдоль дороги, но уже со смещением на YM от прежней полосы. Движение с неизменным положением управляемых колес в точках В и D из-за зазоров в рулевом управлении в экстренном режиме поворотов незначительно по времени и им можно пренебречь. Тогда с учетом ранее рассмотренного неустановившегося поворота и, принимая равные значения времени t1 , t2 ,t3 и t4 при равном значении w, не превышающем уровень по условиям сцепления шин в боковом направлении 𝞿y, W ≤ Lg 𝞿y / V2t1, 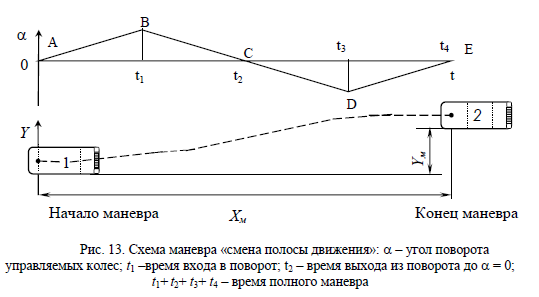 Раздел 12 По каким данным с места ДТП определяется положение ТС в момент столкновения (первого контакта)? Рассматриваются следующие данные с места ДТП: 1) координаты следов шин ТС на подходе к месту столкновения, резкое изменение направления следов, следы бокового скольжения шин при развороте ТС; 2) расположение осыпи земли, осколков, стекол и пластмасс, пятен масла, тосола; следы от деталей, груза; 3) размеры и характер повреждений ТС; 4) координаты расположения ТС на проезжей части после ДТП. Какие законы механики используются при расчетах столкновений ТС? Закон сохранения количества движения: m1V1С + (– m2V2С) = m1V1 + m2 V2. Равенство импульса силы: m1V1 = m2V2. Кинетическая энергия затрачивается на поступательное и вращательное движение ТС со скольжением его шин: mV2/2 = mg𝞿xS + 2mg𝞿yabγ / L, Можно ли по конечному положению ТС после встречного столкновения приближенно определить их расположение в момент столкновения? Наибольшую информацию дают следы шин ТС на поверхности дороги. Так, если на месте ДТП были зафиксированы следы торможения ТС-1 до столкновения, то по их обрыву и началу бокового скольжения можно вполне достоверно найти положение этого ТС в момент столкновения, а ТС-2 на масштабной схеме разместить в контакте с ТС-1 с учетом повреждений передней части. При этом нельзя стыковать поврежденные машины с целью определения угла между ними, так как зоны смятия образуются в сложном процессе взаимодействия ТС с разворотом относительно друг друга на большой угол до рассоединения. Однако такой подход в практике экспертов часто наблюдается, в результате получают нереально большие углы между продольными осями ТС, по которым в зону контакта ТС должны были при высокой скорости заходить от кюветов, что не могло иметь места. Если ТС входили в зону контакта без торможения, то из-за вероятного заклинивания передних колес при ударе и развороте ТС на проезжей части обязательно должны оставаться следы шин. Просто в ночное время при плохом освещении они малозаметны, особенно на обледенелой дороге. Осадки в виде дождя и снега, а главным образом, проходящие по зоне столкновения многочисленные ТС до приезда сотрудников ГИБДД уничтожают эти следы. Одновременно измельчаются и растаскиваются шинами осколки, земля и др. В результате в зоне осколков и осыпи, часто без качественного описания и фиксирования этой зоны на схеме ДТП наносят точки столкновения по показаниям участников. Все понимают, что это очень неточно, но впоследствии эти точки долго обсуждаются и обосновываются, хотя о какой точке может идти речь при взаимном перекрытии ТС около и даже более половины ширины своей передней части. Какова последовательность определения скоростей движения ТС при встречном столкновении и выявления технической возможности предотвращения ДТП (показать на схеме)? 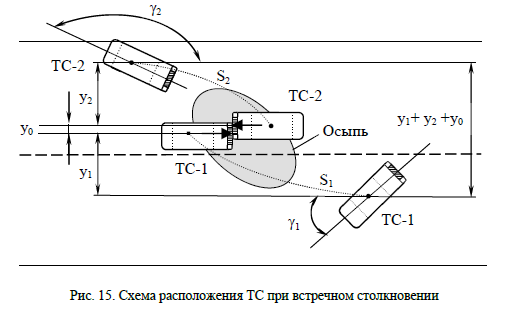 Предварительно следует определить скорости ТС в момент столкновения, а затем скорости в момент начала интенсивного торможения и начальные скорости ТС. Выясняется, таким образом, своевременность действий водителей и причинная связь с тяжестью последствий высокой скорости в момент столкновения. Определяется техническая возможность предотвращения столкновения или тяжести последствий путем маневра ТС к правому краю дороги. Наиболее распространенной причиной встречных столкновений является неправильное выполнение обгона, это обгон при ограничении видимости полосы встречного движения на достаточном расстоянии и при выезде ТС с правым поворотом навстречу обгоняющему. Причиной может быть выезд ТС на полосу встречного движения в связи с резким торможением или маневром впереди идущего ТС (при недостаточной дистанции или с опозданием обнаружения опасности). В условиях низкого сцепления наблюдаются встречные столкновения из-за нарушения устойчивости ТС при запоздалом и резком маневре водителей для ухода с осевой линии, где возможна была единственная удобная для движения полоса. Водители при возникновении опасности встречного столкновения часто вместо интенсивного торможения на своей стороне движения совершают маневр на правую обочину, куда уходит и потерявшее устойчивость встречное ТС, либо, что еще хуже, совершают маневр на сторону встречного движения, куда нередко успевает возвратиться и встречное ТС, или для встречи с последним подставляют прицеп (полуприцеп). Какие положения ПДД рассматриваются при оценке действий водителей в случае встречного столкновения ТС? После расчетного анализа дорожно-транспортной ситуации эксперту приходится определять с технической стороны соответствие действий водителей требованиям пп. 9.1, 9.2, 9.3, 9.4, 9.9, 9.10 и 9.11 ПДД по расположению ТС на проезжей части и безопасному боковому интервалу, требованиям пп. 11.1 -11.7 ПДД по обгону и объезду, а также требованиям п. 10.1 ПДД. Как экспертами исследуются попутные столкновения, какие положения ПДД при таких столкновениях рассматриваются? Попутные столкновения составляют до 15 % от общего числа столкновений, и они рассматриваются как относительно медленно протекающие неупругие удары. Поэтому ТС обычно после столкновения перемещаются вместе, а если и расходятся и разворачиваются, то на малые расстояния и углы. Вначале при исследовании определяется взаимное положение ТС в момент первого контакта по указанным признакам с учетом того, что осыпь земли и осколков с ТС перемещаются в одном направлении. Скорости ТС после столкновения определяются как и показано выше по перемещению, развороту и замедлению при торможении, с которым обычно ТС входят в контакт. Скорости в момент столкновения можно определить по закону сохранения количества движения для чего предварительно нужно определить (или принять) скорость одного из ТС в момент столкновения. m1V1С + m2V2С = m1V1 + m2V2 Затем по согласованным таким образом значениям скоростей можно найти взаимное положение ТС в характерные моменты времени, связанные с началом торможения или с расчетным началом осознания опасности водителем заднего ТС. Определяется дистанция между ТС в момент, например, начала торможения переднего ТС, а факт его торможения уточняется по обгоревшим нитям ламп сигналов торможения. С ростом интенсивности движения возрастает число попутных столкновений, так называемых цепных, когда друг за другом сталкивается несколько автомобилей. Поскольку при попутном столкновении замедление заднего получается более интенсивным, чем по реализации предельного сцепления, то следующий за ним даже на безопасной дистанции третий автомобиль также входит в контакт со столкнувшимися. В таких цепных последовательных столкновениях необходимо тщательно изучить повреждения и деформации, которые по объему должны убывать от первых столкнувшихся к последующим. Для более раннего определения торможения впереди идущих автомобилей в настоящее время в верхних зонах кузова сзади ТС устанавливаются дублеры сигналов торможения. Нередки случаи попутных столкновений, когда остановившийся у перекрестка автомобиль получает сзади удар и уже от удара наезжает на впереди стоящий автомобиль, а затем происходят столкновения подходящих следом ТС. Такие ДТП требуют тщательного последовательного экспертного исследования с расчетом скоростей, перемещений и с согласованием повреждений ТС. При неполной и некачественной информации с места ДТП выявление действительной последовательности контактирования ТС может быть весьма затруднительным. Экспертам наиболее часто ставят вопросы о положении ТС в момент столкновения, о скорости их движения, о соответствии показаний участников механизму данного ДТП и о соответствии действий водителей требованиям п. 9.10 ПДД о безопасной дистанции и боковом интервале, требованиям раздела 12 ПДД о стоянке и остановке и раздела 7 по применению аварийной сигнализации. Также эксперту приходится рассматривать выполнение требований пп. 10.1, 10.5 ПДД, требований по маневру и др. Как определяются скорости движения при боковых столкновениях на перекрестках? Боковые столкновения происходят главным образом на перекрестках, в зонах выездов из дворов и прилегающих территорий. Проще всего и с достаточной точностью рассчитываются боковые столкновения, когда ТС примерно одной массы подходят под углом 90° и затем перемещаются практически без расхождения друг с другом (рис. 16). В самом простом случае после определения положений ТС в момент столкновения через зону контакта проводятся линии координатных осей, на которые можно проектировать векторы скоростей и количества движения [7]: в проекции на ось Х m 1V 1c = ( m1 +m2) Vx ; в проекции на ось Y m 2V 2с =( m 1 + m 2) Vy , где V1С и V2С – скорости ТС в момент столкновения (первого контакта); Vх и Vу – проекции скорости совместного перемещения ТС от места столкновения на оси X и Y. В какой последовательности экспертами исследуется столкновение ТС на регулируемом перекрестке? Последовательность определения скоростей ТС в момент столкновения следующая. Вначале определяется положение ТС в момент первого контакта с учетом информации с места ДТП (следы, осыпь, повреждения ТС, траектории подхода, перемещения и др.) и строится масштабная схема. По ней находят пути перемещения центров масс ТС и углы их разворота после столкновения при переходе от места столкновения в конечное положение. По данным перемещений S и разворотов γ определяются значения остаточных скоростей ТС после столкновения: V =  Затем находится значение вектора количества движения mV каждого ТС, и из начала координат эти векторы в определенном масштабе откладываются по направлениям перемещения соответствующих центров масс от места столкновения. Строится параллелограмм и находится вектор равнодействующей количества движения. На векторе равнодействующей вектора количества движения строится новый параллелограмм по направлениям уже подхода ТС к месту столкновения. Если одно из ТС двигалось на повороте, то берется направление касательной к траектории центра масс в момент столкновения. По такому построению находятся векторы количества движения ТС в момент столкновения, а по ним с учетом масштаба построения диаграммы определяются уже значения скоростей ТС в момент столкновения. 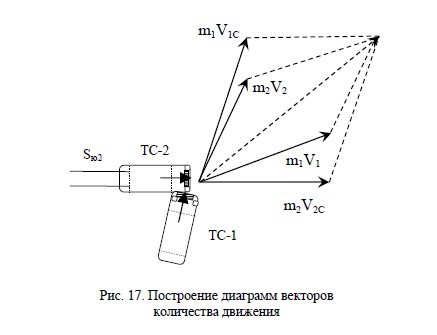 Значение скорости поворачивающего ТС проверяется по боковой перегрузке на повороте данной кривизны. Если значение скорости получается близкой к предельной по условиям сцепления, а явный занос этого ТС при ударе не возник, то уточняются условия сцепления и место первого контакта, при котором ТС должно было располагаться на траектории меньшей кривизны. Затем по имеющимся следам торможения до столкновения находятся начальные скорости ТС и время их движения до места столкновения от границы проезжей части, от стоп-линии и от положения взаимного обнаружения на подходе к перекрестку. Какие исследовательские работы необходимы для повышения достоверности экспертных исследований столкновений ТС? На регулируемых перекрестках необходима надежная информация о режиме работы светофорного объекта и о сигнале светофора в момент столкновения. О последнем наиболее надежными могут быть показания водителей нестолкнувшихся ТС, которые стояли в ожидании разрешающего сигнала или только начинали движение на него. Именно таких свидетелей необходимо фиксировать сразу после столкновения. Экспертам часто предлагают проверить расчетом противоречивые показания участников о скорости движения и о положении ТС относительно перекрестка в момент смены сигналов светофора. Рационально по результатам расчетов на масштабной схеме показать взаимные положения участников в характерные единые для обоих участников моменты времени. В зимнее время возможны конфликты с местными водителями, которые знают, что они движутся по дороге, на которой под снегом имеется асфальтобетонное покрытие, отсутствующее на пересекаемой дороге. Но при отсутствии знаков приоритета это не дает им преимущества. Поэтому при таких ДТП необходимо у водителей брать подробные объяснения их действий с обоснованием своего приоритета в последовательности выполнения требований пп. 13.13, 13.9, 13.11 и 13.12 ПДД. По расчету столкновений с определением скоростей и взаимного положения ТС эксперт может определить техническую возможность предотвращения ДТП и выявить несоответствие уровня скорости подхода к пересечению выполнению требования уступить дорогу. |