Курсовая работа по дисциплине Цифровые системы управления в мехатронике АлФахри Ф. Ф. А. М
 Скачать 1.2 Mb. Скачать 1.2 Mb.
|

2. Исследование нескорректированного контура скорости2.1. Определение суммарной установившейся ошибки электропривода с двигателем типа 2ПН90LYXL4.Определяем установившуюся ошибку относительно задающего воздействия по формуле:  Определяем установившуюся ошибку относительно момента сопротивления по формуле:  Определяем суммарную установившуюся ошибку электропривода с двигателем типа 2ПН90LYXL4:  2.2. Моделирование нескорректированного замкнутого контура скорости с двигателем типа 2ПН90LYXL4. Оценка качества переходных процессов. Определение установившиеся ошибки относительно задающего воздействия и момента сопротивления. ССДМ ЭП в среде MatLab представлена на рис. 2.2.1. 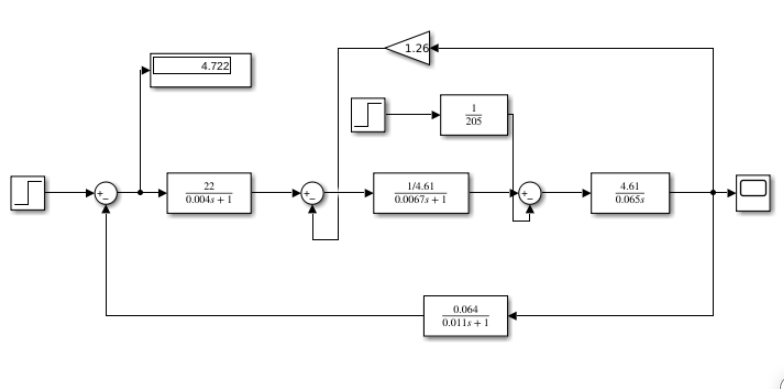 Рис. 2.2.1. ССДМ нескорректированного контура скорости На рис. 2.2.2 представлена зависимость угловой скорости от времени нескорректированного контура скорости. Наброс момента  производился через 0,5 с после пуска системы «преобразователь – двигатель». производился через 0,5 с после пуска системы «преобразователь – двигатель». Из графика видно, что установившееся значение скорости двигателя без нагрузки составляет  рад/с. За счет влияния угловая скорость уменьшилась примерно на 3,4 рад/c. рад/с. За счет влияния угловая скорость уменьшилась примерно на 3,4 рад/c. , рад/с , рад/с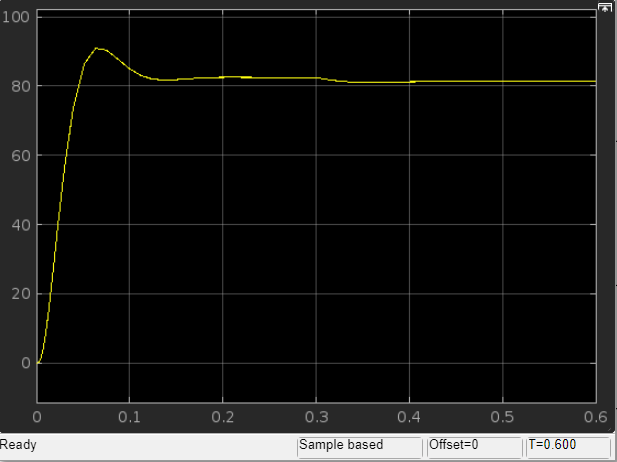 t, c t, cРис. 2.2.2. Зависимость угловой скорости от времени нескорректированного контура скорости График характеризует колебательную систему с перерегулированием около 16 % и числом колебаний N = 1 и. Время протекания переходного процесса составляет 0,4 с. Наличие колебаний обусловлено комплексно-сопряженными корнями характеристического уравнения замкнутой системы. Установившиеся ошибки по задающему воздействию и по моменту сопротивления, которые составили:  Таким образом, суммарная установившаяся ошибка электропривода с двигателем типа 2ПН90LYXL4: Результаты моделирования подтверждают правильность расчетов, проведенных в примере 2.1а. 3. Оптимизация контура скорости 3.1. Расчёт параметров и электрической схемы аналогового ПИД-регулятора. Выбор RC-элементов и операционного усилителя.  Поскольку, 4Тэ меньше, чем Тм, то передаточную функцию регулятора скорости представим в виде:  где постоянные времени    коэффициент передачи  На основании схемы, представленной на рис. 3.9, постоянные времени и коэффициент передачи ПИД-регулятора скорости определяются по формулам:   Рис. 3.9. Электрическая схема ПИД-регулятора скорости Заметим, что в формулах (3.21) число неизвестных  превышает число уравнений. Поэтому в инженерной практике прибегают к способу, когда значении емкостей назначаются из стандартного ряда 1; 10; 22; 33; 47; 100 мкФ. Тогда порядок расчета сводится к следующему. превышает число уравнений. Поэтому в инженерной практике прибегают к способу, когда значении емкостей назначаются из стандартного ряда 1; 10; 22; 33; 47; 100 мкФ. Тогда порядок расчета сводится к следующему.Задаемся емкостью  и рассчитываем и рассчитываем . .Задаемся емкостью  и рассчитываем и рассчитываем . .Согласно формуле  сопротивление сопротивление  . .Переходим к расчету номинальных значений RC-элементов. Постоянные времени РС:    Коэффициент передачи регулятора скорости:   Задаем  мкФ и по табл. П6 выбираем конденсатор Panasonic серии NHG. Тогда мкФ и по табл. П6 выбираем конденсатор Panasonic серии NHG. Тогда Приводим сопротивление к номинальному значению по ряду Е192 (см. табл. П5) и принимаем  кОм. кОм.Задаем  мкФ и по табл. П6 выбираем конденсатор Panasonic серии NHG. Тогда мкФ и по табл. П6 выбираем конденсатор Panasonic серии NHG. Тогда Приводим сопротивление к номинальному значению по ряду Е192 (см. табл. П5) и принимаем  Ом. Ом.Рассчитываем сопротивление:  Приводим сопротивление к номинальному значению по ряду Е192 (см. табл. П5) и принимаем  4 кОм. 4 кОм.По полученным номинальным значениям сопротивлений РС пересчитываем коэффициент передачи  Полученное значение не отличается от величины коэффициента передачи  , поэтому подстройки резистора , поэтому подстройки резистора  не требуется. не требуется.3.2. Проведение моделирования КС с аналоговым ПИД-регулятором скорости. Получение графиков переходных функций по задающему воздействию и по моменту сопротивления нагрузки  . Построение графиков ЛЧХ разомкнутого КС. Проведение анализа результатов моделирования. . Построение графиков ЛЧХ разомкнутого КС. Проведение анализа результатов моделирования. Для моделирования построим ССДМ КС в системе Simulink, представленную на рис. 3.10. 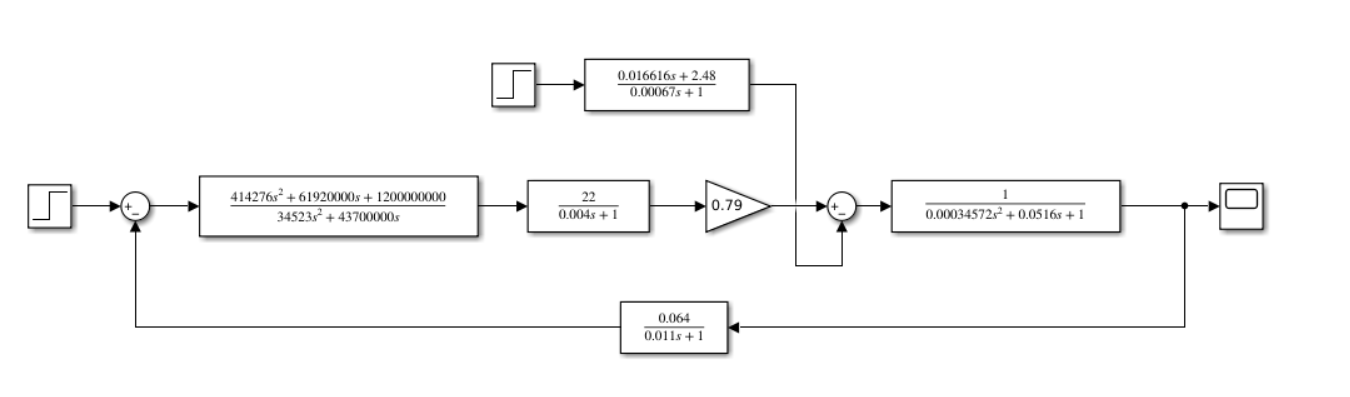 Рис. 3.10. Структурная схема динамической модели контура скорости в системе Simulink В блоке Step задаём воздействие, равное входному напряжению суммирующего усилителя КС  В, а в блоке Step 1 значение момента сопротивления нагрузки В, а в блоке Step 1 значение момента сопротивления нагрузки  . На рис. 3.11 изображен график переходной характеристики контура скорости по управляющему воздействию. . На рис. 3.11 изображен график переходной характеристики контура скорости по управляющему воздействию.Для построения переходной характеристики по моменту сопротивления нагрузки Мс устанавливаем соответственно в блоке Step входное воздействие  В, а в блоке Step 1 – момент сопротивления В, а в блоке Step 1 – момент сопротивления  .. Полученная зависимость представлена на рис. 3.12. .. Полученная зависимость представлена на рис. 3.12. Ω(t), рад/с 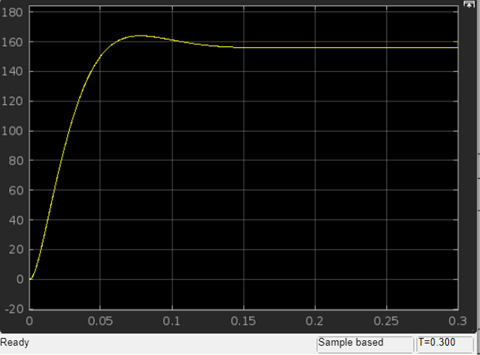 t,c t,cРис. 3.11. График зависимости угловой скорости от времени скорректированного контура скорости по сигналу задания Ω(t), рад/с 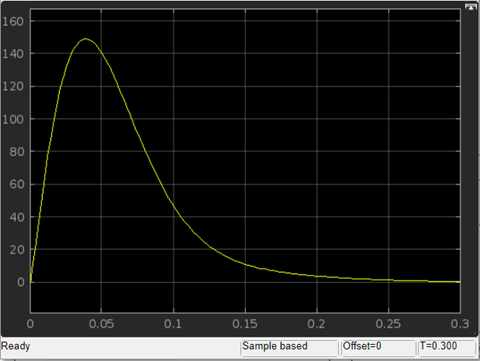 t, c t, cРис. 3.12. График зависимости угловой скорости от времени скорректированного контура скорости по моменту сопротивления Переходим к анализу полученных графиков. По графику на рис. 3.11 определяем перерегулирование:  Перерегулирование, полученное в результате моделирования, отличается от требуемого значения 4,3 %. Такое изменение обусловлено влиянием малой постоянной времени Тф. Если принять Тф = 0, то перерегулирование будет равно 4,3 %, а передаточная функция ТГ представится безынерционным звеном: Wос(s) = Кос. При этом суммарную малую постоянную времени КС следует рассчитывать по формуле:  Время нарастания  определяется в первой точке пересечения графика переходной функции и установившегося значения угловой скорости Ωуст и составляет: определяется в первой точке пересечения графика переходной функции и установившегося значения угловой скорости Ωуст и составляет: Проверяем соответствие полученного значения требованиям настройки на ОМ:  Из анализа графика на рис. 3.12 следует, что при воздействии неизменного по величине момента сопротивления Мс моментная составляющая ошибки ΔΩм примерно через 0,4 с становится равной нулю. Это говорит о том, что искусственная механическая характеристика стала абсолютно жёсткой. Увеличение точности обусловлено наличием в структуре регулятора скорости интегральной составляющей. Далее переходим к построению ЛЧХ: num1=[0.0004 0.064 1.244]; den1=[0.000034 0.0437 0]; sys1=tf(num1,den1) num2=[22]; den2=[0.004 1]; sys2=tf(num2,den2) num3=[0.79];[ den3=[0.00034 0.0516 1]; sys3=tf(num3,den3) num4=[0.064]; den4=[0.011 1]; sys4=tf(num4,den4) sys5=sys1*sys2*sys3*sys4 sys5 = 0.0004449 s^2 + 0.07119 s + 1.384 --------------------------------------------------------------------------------------- 5.086e-13 s^6 + 9.043e-10 s^5 + 3.615e-07 s^4 + 5.287e-05 s^3 + 0.002944 s^2 + 0.0437 s num = [0.0004449 0.07119 1.384]; den = [5.086e-13 9.043e-10 3.615e-07 5.287e-05 0.002944 0.0437 0]; bode(num, den) Результаты моделирования представлены на рис. 3.12. Из анализа графиков видно, что запасы устойчивости по фазе и амплитуде составляют Lз = 16,8 дБ (Gain Margin) и  (Phase Margin) соответственно. (Phase Margin) соответственно.Значение фазы  соответствует частоте среза ωс, т. е. точке пересечения графика ЛАЧХ с линией 0 дБ. соответствует частоте среза ωс, т. е. точке пересечения графика ЛАЧХ с линией 0 дБ.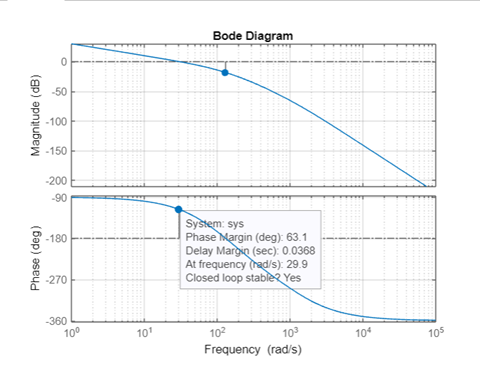 Рис. 3.12. Логарифмические частотные характеристики контура скорости Вывод: результаты моделирования подтверждают правильность расчёта параметров РС и позволяют сделать вывод о том, что КС настроен на ОМ. 5. Синтез аналогового регулятора положения (графоаналитический метод) 5.1. Синтез регулятора положения в системе с астатизмом второго порядка максимальная угловая скорость нагрузки Ωmax = 44 град/с; максимальное угловое ускорение нагрузки εmax = 11 град/с2; яшибка по скорости = 25 мин; ошибка по ускорению = 50 мин передаточное число редуктора i1 = 203; показатель колебательности М = 1,4; коэффициент передачи вращающегося трансформатора Kвт = 28,5В/рад. Моментная составляющая ошибки   . . Определяем параметры желаемой передаточной функции ЭП. Коэффициент передачи по ускорению будет равен:  с– 2. с– 2. Значение базовой частоты определится по формуле:  с– 1. с– 1. По выражениям рассчитываем постоянные времени:  с; с;  с. с.С учётом проведённых расчётов запишем желаемую передаточную функцию ЭП с астатизмом второго порядка:  . (5.13) . (5.13)Передаточная функция неизменяемой части:  . .Данные для определения передаточной функции  примем по примеру 3.2 и составим программу: примем по примеру 3.2 и составим программу:num1=[0.0004 0.064 1.244]; den1=[0.000034 0.0437 0]; sys1=tf(num1,den1) num2=[22]; den2=[0.004 1]; sys2=tf(num2,den2) num3=[0.79]; den3=[0.00034 0.0516 1]; sys3=tf(num3,den3) sys4=sys1*sys2*sys3; num5=[0.064]; den5=[0.01 1]; sys5=tf(num5,den5); sys6=feedback(sys4,sys5); num7=[28.5]; den7=[203.4 0]; sys7=tf(num7,den7); sys8=sys6*sys7 sys8 = 0.001981 s^3 + 0.5151 s^2 + 37.86 s + 616.2 ------------------------------------------------------------ 9.405e-11 s^7 + 1.681e-07 s^6 + 6.828e-05 s^5 + 0.01025 s^4 + 0.6805 s^3 + 23.37 s^2 + 281.4 s В приведенной программе оператор feedback осуществляет операцию замыкания отрицательной обратной связи контура скорости согласно уравнению:  . .Для определения передаточной функции регулятора положения составляем следующую программу: num1=[18.667*0.433 18.667]; den1=[0.0722 1 0 0]; sys1=tf(num1, den1); num2=[0.001981 0.5151 37.86 616.2]; den2=[9.405e-11 1.681e-07 6.828e-05 0.01025 0.6805 23.37 281.4 0]; sys2=tf(num2, den2); sys3=sys1/sys2 sys3 = 7.602e-10 s^8 + 1.36e-06 s^7 + 0.000555 s^6 + 0.08412 s^5 + 5.692 s^4 + 201.6 s^3 + 2711 s^2 + 5253 s ------------------------------------------------------------------------------ 0.000143 s^6 + 0.03917 s^5 + 3.249 s^4 + 82.35 s^3 + 616.2 s^2 Составляем программу для определения ЛАЧХ регулятора положения, изображенную на рис. 5.2: num=[7.602e-10 1.36e-06 0.000555 0.08412 5.692 201.6 2711 5253 0]; den=[0.000143 0.03917 3.249 82.35 616.2 0 0]; bode(num, den) 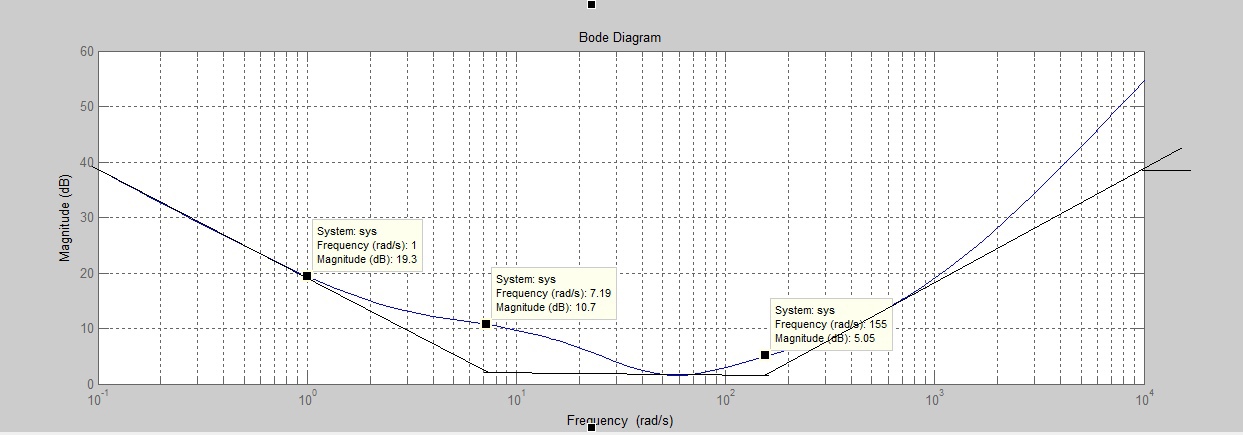 Рис. 5.2. ЛАЧХ регулятора положения Переходим к анализу полученного графика. Низкочастотный участок ЛАЧХ регулятора положения проходит под наклоном –20 дБ/дек, постепенно изменяя наклон к среднечастотному участку до 0 дБ/дек. Высокочастотный участок полученной ЛАЧХ ( 100 с– 1) аппроксимируем двумя асимптотами с наклоном 20 дБ/дек и 0 дБ/дек. Таким образом, проведённый анализ показывает, что ЛАЧХ следует аппроксимировать четырьмя асимптотами и придать регулятору положения свойства ПИД-регулятора. Рассчитаем параметры передаточной функции регулятора положения. На частоте = 1 находим:  дБ, дБ,откуда  = 9,2257 с– 1. = 9,2257 с– 1.По графику, представленному на рис. 5.2, определяем частоты сопряжения 1 = 7,19 с– 1; 2 = 155 с– 1; 3 = 10000 с– 1 и рассчитываем постоянные времени:  с; с;  с; с;  с. с.Подставляя значение Т1, получаем коэффициент передачи регулятора положения:  . .С учётом полученных значений передаточная функция синтезированного регулятора положения принимает вид:  . .Для построения динамической модели ЭП представим передаточную функцию РП (ПИД-регулятора) в виде произведения:  . .
 Результаты моделирования показаны на рис. 5.1.3-5.1.5. α(t), рад 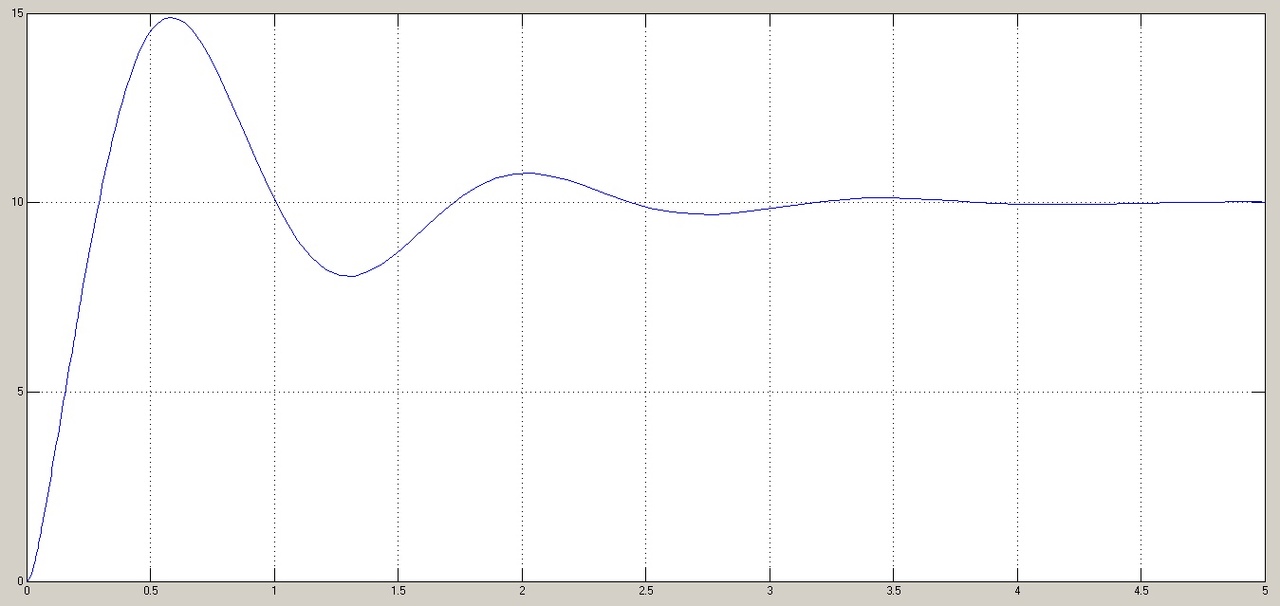 t, c t, cРис. 5.1.3. Переходная характеристика системы по задающему воздействию  , рад , рад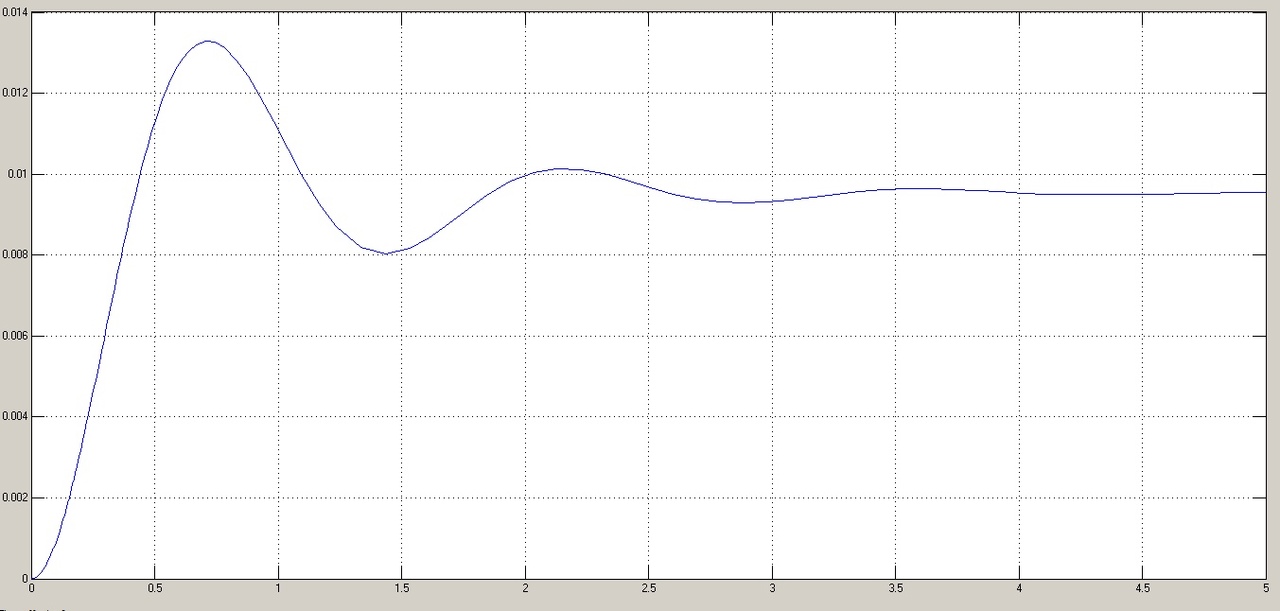 t, c t, cРис. 5.1.4. График ошибки системы при квадратично возрастающем задающем воздействии   , рад , рад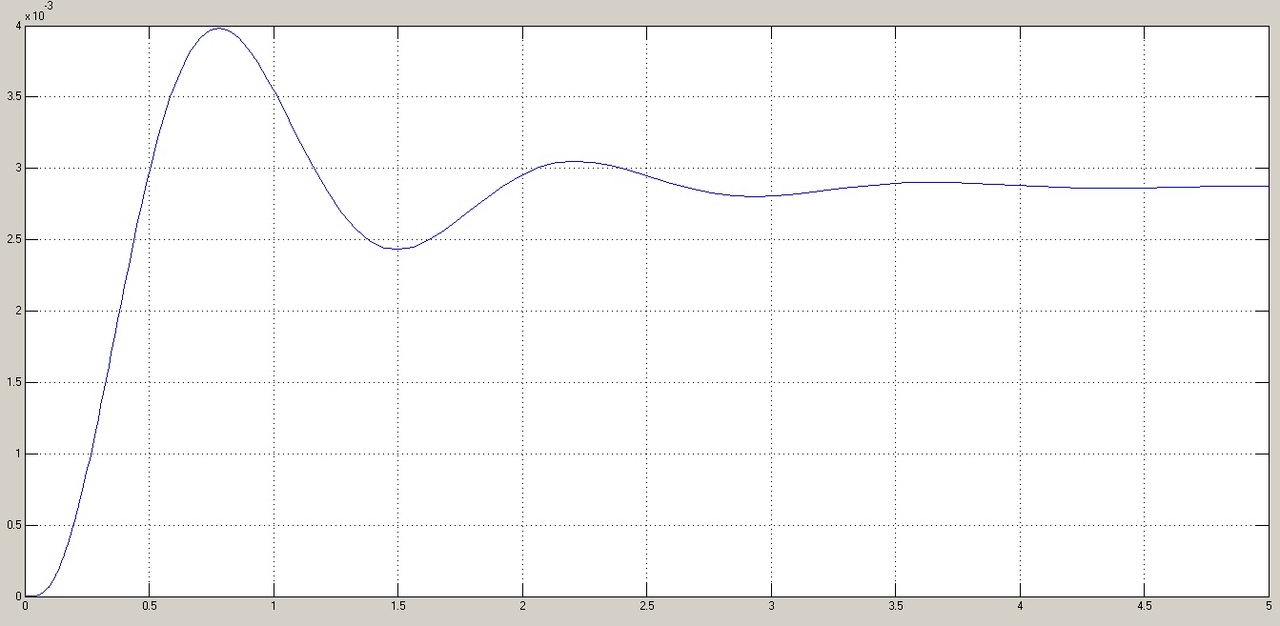 t, c t, cРис. 5.1.5. График моментной составляющей ошибки системы при квадратично возрастающем моменте сопротивления Анализ графика (рис. 5.1.3) показывает, что следящий позиционный ЭП отрабатывает ступенчатое воздействие  примерно за 2,0 с с перерегулированием примерно за 2,0 с с перерегулированием  и числом колебаний N < 1, что соответствует заданному показателю колебательности М = 1,1. и числом колебаний N < 1, что соответствует заданному показателю колебательности М = 1,1.Поскольку контур положения содержит ПИД-регулятор положения, очевидно, что при ступенчатом и линейно возрастающем задающем воздействии статическая ошибка и ошибка по скорости будут равны нулю. На рис. 5.1.4 представлена характеристика при отработке типового задающего воздействия  /2. Установившаяся ошибка системы составляет примерно 25,44 мин. Моментная составляющая ошибки при отработке квадратично возрастающего момента сопротивления /2. Установившаяся ошибка системы составляет примерно 25,44 мин. Моментная составляющая ошибки при отработке квадратично возрастающего момента сопротивления  составляет 3,3 мин по истечении 2,5 с (рис. 5.1.5). составляет 3,3 мин по истечении 2,5 с (рис. 5.1.5). |