Воздушная навигация. Лекция 1. Основные навигационные понятия и определения
 Скачать 3.21 Mb. Скачать 3.21 Mb.
|

|
Принцип действия. Как отмечалось, в радиодальномерах ДМЕ, СД-67, СДК-67 и СД-75 реализуется импульсный метод измерения дальности с запросом с самолета. Следовательно, бортовое оборудование дальномера (запросчик) включает схему формирования запросных импульсов (хронизатор), передатчик, антенну, приемник и схему измерения временного интервала между запросным и ответным импульсами (хронометр) (рис. 7.13,а). В свою очередь в состав наземного оборудования (рис. 7.13,6) радиодальномера (ответчика), помимо антенны, приемника и передатчика, входят декодирующее устройство (иногда называемое дешифратором), предназначенное для формирования одиночного импульса только в том случе, если величина кодовой задержки принятых сигналов соответствует выбранному рабочему каналу, кодирующее устройство, обеспечивающее формирование пары импульсов с требуемой кодовой задержкой в канале ответа, и схема ограничения числа ответных сигналов для предотвращения перегрузки передатчика. В 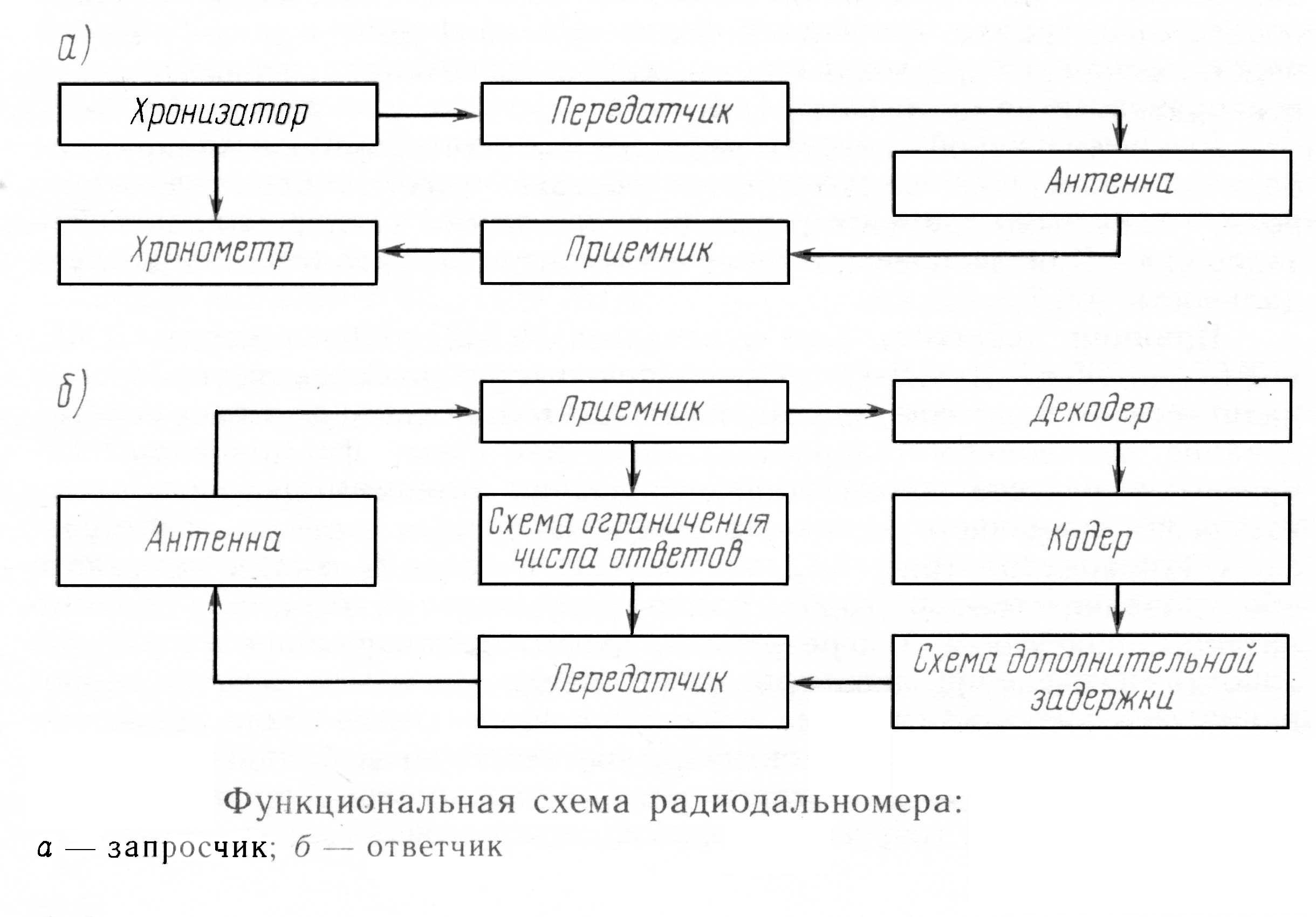 радиодальномерах принимается ряд мер, обеспечивающих достижение высокой надежности их функционирования. К числу таких мер относятся полная автоматизация работы оборудования, использование кодовой защиты от помех, частотной и временной селекции сигналов и т. п. радиодальномерах принимается ряд мер, обеспечивающих достижение высокой надежности их функционирования. К числу таких мер относятся полная автоматизация работы оборудования, использование кодовой защиты от помех, частотной и временной селекции сигналов и т. п.Сущность кодовой защиты состоит в использовании для запроса и ответа вместо одиночных импульсов пары импульсных сигналов с фиксированными значениями временных интервалов между ними. Эти интервалы называются кодовыми. В бортовой и наземной аппаратуре предусматривается несколько значений кодовых интервалов. Временное кодирование сигналов позволяет увеличить количество независимых рабочих каналов и обеспечивает существенное повышение помехозащищенности этих каналов. Без достаточной помехозащиты не может быть достигнута высокая надежность работы радиодальномеров. В самом деле, при высокой интенсивности воздушного движения количество запросных и ответных сигналов становится столь значительным, что на борту данного ЛД появляется возможность приема сигналов, посылаемых в ответ на запрос другого самолета. Прием такого сигнала нарушает работу дальномера, так как его временное положение отличается от временного положения сигнала ответа на запрос данного ЛА. При временном кодировании предотвращается возможность проникновения в каналы дальномера любых одиночных импульсов и парных импульсов, кодовый интервал между которыми не совпадает с кодовым интервалом, установленным в данном дальномере. Таким образом, помимо частотной селекции сигналов различных дальномеров, осуществляется также их кодовая селекция и достигается существенное повышение надежности функционирования. Для реализации принципов кодовой селекции в состав запросчика включается кодирующее устройство, обеспечивающее формирование парных запросных импульсов с кодовым значением задержки между ними, и декодирующее устройство, обеспечивающее выделение только той пары ответных импульсов, кодовый интервал между которыми соответствует заданному значению. В 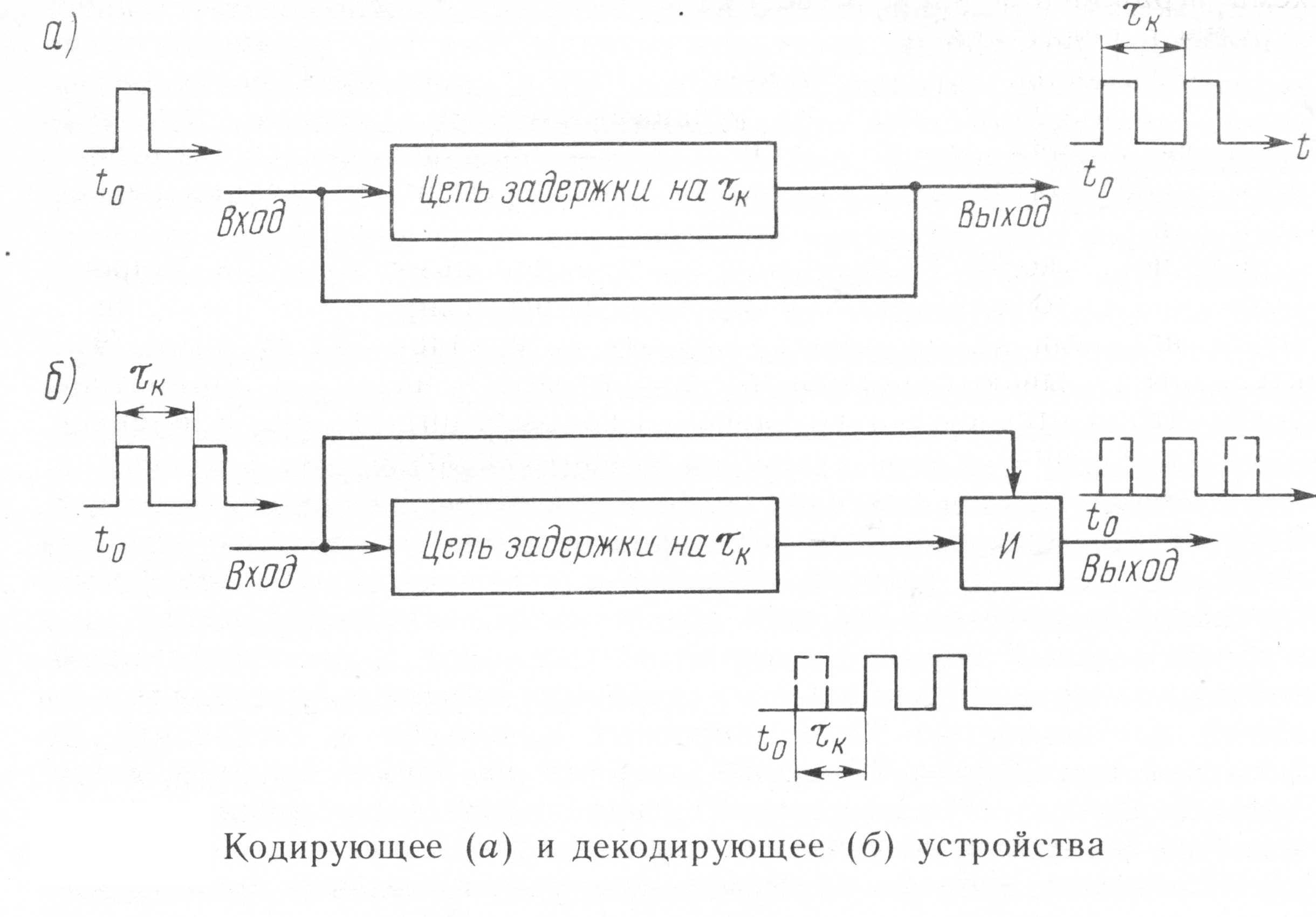 свою очередь в состав ответчика вводятся выполняющие аналогичные функции декодирующее устройство канала запроса и кодирующее устройство канала ответа. Функциональные схемы кодирующего и декодирующего устройств и временные диаграммы процессов в этих устройствах приведены на рис. 7.14. свою очередь в состав ответчика вводятся выполняющие аналогичные функции декодирующее устройство канала запроса и кодирующее устройство канала ответа. Функциональные схемы кодирующего и декодирующего устройств и временные диаграммы процессов в этих устройствах приведены на рис. 7.14.Для обеспечения высокой помехозащищённости и надежности работы радиодальномеров, помимо кодовой селекции, применяются также частотная и временная селекции. Частотная селекция состоит в том, что запросные импульсы, излучаемые различными самолетами, отличаются друг от друга частотами повторения и это приводит к тому, что при постоянстве временных интервалов между запросными импульсами и импульсами ответа на запрос данного ЛА (точнее эти временные интервалы сравнительно медленно изменяются из-за перемещения ЛА) задержка импульсов ответа на сторонние запросы относительно запросного импульса данного ЛА быстро изменяется от запроса к запросу и эти импульсы в схему измерения временного интервала не пропускаются. Сущность временной селекции состоит в том, что бортовой приемник основную часть времени закрыт и открывается только на короткие интервалы времени при приходе ответных сигналов. Благодаря такому режиму работы мешающие сигналы, обычно не совпадающие по своему временному положению с полезными сигналами, на выход приемника и в измерительные цепи не проникают. Таким образом, бортовой приемник обычно закрыт и открывается специальным селекторным импульсом, длительность которого несколько превышает общую длительность парного ответного сигнала. Очевидно, что временное положение селекторного импульса должно соответствовать временному положению ответного сигнала. Так как временное положение ответного сигнала неизвестно, то в запросчике предусматривается специальная схема управления селекторным импульсом. Эта схема выполняет две функции: она обеспечивает поиск ответного сигнала в начальный период работы радиодальномера после его включения и автоматическое сопровождение этого сигнала после завершения процесса поиска. При поиске совершается последовательный «просмотр» интервала времени, следующего за излучением сигналов. Автомат сопровождения осуществляет определение величины временного рассогласования между селекторным и ответным импульсами и формирование сигнала управления временным положением селекторного импульса, т. е. его задержкой относительно момента запроса. Уместно указать еще одну особенность схемы наземного ответчика. В ответчике предусмотрена цепь фиксированной задержки ответных сигналов, величина которой известна и учитывается при калибровке бортового хронометра. Эта цепь обеспечивает ликвидацию слепой зоны в области малых значений измеряемой дальности. В отсутствии подобной цепи задержки минимальная измеряемая дальность определялась бы общей длительностью пары запросных импульсов и составляла бы 5 км при τк= 36 мкс. Введение задержки на время, большее максимальной длительности запросного сигнала, позволяет устранить ограничение на минимальную величину измеряемой дальности. Измерение времени задержки ответных импульсов относительно запросных производится следующим образом. Измеряемый временной интервал заполняется так называемыми счетными импульсами, период следования которых Тсч строго постоянен и известен. Производя определение числа счетных импульсов в измеряемом временном интервале, рассчитывают дальность до ответчика по формуле r= 0,5cn Tсч, где r — наклонная дальность; с — скорость распространения радиоволн, принимаемая равной скорости света в вакууме; п — число счетных импульсов в измеряемом временном интервале. Контрольные вопросы:
Лекция №12. Применение угломерно-дальномерных навигационных систем. План: 1. Классификация и общая характеристика УД РНС. 2. Определение места ВС. 3. Определение путевой скорости. 4. Определение угла сноса. 5. Система РСБН и варианты её бортовой аппаратуры. В ГА применяются отечественные азимутально-дальномерные системы РСБН, за рубежом используются системы, в состав которых входят всенаправленные маяки VOR, DVOR, PDVOR и радиодальномеры ДМЕ. Существуют две разновидности наземных радиомаяков системы наземных радиомаяков системы РСБН – радиомаяки РСБН-4Н на магистральных аэропортах и В.Т. и радиомаяки РСБН –6 на местных воздушных линиях. Классификация и общая характеристика УДРМС. Основные ТТД РСБН-4. Дальность действия, км, при высоте полета
Радиус нерабочей зоны над РМ на высоте 3000м – не более 3. Точность координаты самолетов на экранах ВИКО при масштабе развертки: 100км: по А,о ±1 Д, км ±3 400км: - по Ао ±1 Д км ±6 Диапазон частот передающих устройств РМС, Мгц
и 905,1- 935,2 - по дальномерному 939,6- 1000,5 Диапазон частот приемного устройства, Мгц 770- 812,8 Количество частотно- кодовых каналов ……….88 Основные ТТД РСБН-6 Дальность действия ,км, при H полета:
Точность измерения: Ао……………………±1,5 Д, м …………………±300 2.Количество самолетов, обеспечиваемых при непрерывном режиме работы: - по дальномерному каналу, >30
Число частотно- кодовых каналов 176. 3. Место ВС в полете определяют в целях контроля пути, нахождения навигационных элементов и восстановления потерянной ориентировки. По радиокомпасу место ВС может быть определено по одной и двум РС. Определение места ВС по одной РС двукратным пеленгованием и прокладкой пеленгов на карте. Рассчитать первый и второй истинный пеленги ВС и проложить их на карте от пеленгуемой радиостанции. Формулы расчета: ИПС= КК+ (±ΔК) + ( ±ΔМ) + КУР ±180о+ (±0) ИПС= ИПСОТСЧ.+ (±0) Из любой точки первого пеленга отложить линию истинного курса и расстояние, пройденное ВС за время между первым и вторым пеленгованием: SПР= Wt или Sпр= Vt Через конечную точку Sпр провести линию , параллельную линии первого пеленга. Точка пересечения этой линии с линией второго пеленга будет место ВС в момент второго пеленгования. Контроль пути по направлению и дальности выполняют с помощью РЛК, расположенных в стороне от ЛЗП, путем нанесения на карту МВС по определенным на борту А и S. Место ВС можно определять и без прокладки А и S на карте, что ускоряет получение необходимых данных контроля пути. В этом случае нужно: при подготовке карты к полету нанести на ЛЗП точку траверза от РЛК до ЛЗП и определить А точки траверза по формуле Атр= ЗИПУ ±90о. Знак « + » берут, если РЛК находится слева. Знак «-», если справа от ЛЗП. В полете, когда необходимо проконтролировать путь по направлению и дальности, запросить у диспетчера МВС и определить угол α = Атр-А или α = А- Атр. Рассчитать на НЛ расстояние по ЛЗП от ВС до точки траверза и расстояние от РЛК по линии траверза. Определить сторону и значение ЛБУ: ЛБУ= Sл.тр-Sтр. ( РЛК слева от ЛЗП) ЛБУ = Sтр – Sл. тр. ( РЛК справа от ЛЗП). 3. Путевая скорость. В полете ее можно определить одним из следующих способов:
а) По расстояния, пройденному за 1 мин. Пример: S= 88 км: t= 11мин. Определить W. Решение: - находим расстояние, пройденное ВС за 1 мин: 88:11= 8 км.
б) Умножением пройденного расстояния на время полета, выраженное в долях часа. Этот способ применяют , если время полета в минутах кратно 60. При этом нужно знать, какую долю часа составляют 1,2, и т.д. минуты:
Пример: S=90км; t=12 мин Определить W. Решение: - находим, какую долю часа составляет пройденное время: 12мин = 1/5 часа.
Угол сноса. В полете он может быть определен одним из следующих способов:
Определение угла сноса по отметкам места ВС. Порядок работы при этом способе следующий:
4.Радиотехнические средства ближней навигации предназначены для обеспечения ЭВС, оборудованных соответствующей бортовой аппаратурой и находящихся в зоне действия системы, радионавигационной информацией об А и Д относительно точки расположения наземного РМ. Принцип работы по определению дальности ВС на ВС. Для определения дальности ВС на ВС в системе РСБН-2 используется один из принципов радиолокации- постоянство скорости распространения радиоволн. Дальность определяется измерением суммарного времени распространения запросного сигнала с ВС на землю и ответного сигнала с земли на ВС. Это время пропорционально измеряемому расстоянию Д= Vt|2 ; где Д- дальность от ВС до РМ в км. V- скорость распространения радиоволн ( 300000км/сек) t- время прохождения радиоволной расстояния от ВС до РМ и обратно. Принцип на ВС в системе РСБН-2 определяется путем измерения временного интервала между начальным временем отсчета, одинаковым для всех самолетов, находящихся в зоне действия РСБН-2, и моментом приема азимутального сигнала каждым из них. Контрольные вопросы:
Ключевые слова: РСБН, место ВС, путевая скорость, угол сноса, азимут ВС. Лекция №13 Применение радиолокационной станции в полёте. План: 1. Режимы работы БРЛС. Характеристики радиолокационного изображения местности на яркостном индикаторе. 2. Обнаружение и обход гроз при помощи радиолокатора «Гроза». 3. Расчет данных для обхода грозового очага стороной. 4. Пролет между двумя засветками от грозовых очагов. 5. Расчет данных для пролета грозового облака сверху. 6. Назначение и задачи решаемые радиолокатором «Гроза». 7. Изображение различных ориентиров на индикаторе радиолокатора. 8. Определение места самолета по ИПС и ГД при полетах с ОМПУ. В зависимости от обстановки, станцию используют в нужном режиме. Режим «готов» предназначен для того, чтобы станция после 3-5 – минутного прогрева была готова к немедленной работе. В этом режиме на станцию подаётся питание, но высокое напряжение на передатчик не подаётся. Следует помнить, что даже при кратковременном полном выключении станции и последующем её включении реле времени автоматически выдерживает указанное выше время. Поэтому в полёте полностью выключать БРЛС не следует. Если нет необходимости в использовании станции, следует перевести её в режим «готов». Режим «земля» обеспечивает обзор земной поверхности. На масштабах 30, 50 и 125 км используется веерный луч, на масштабе 250 км для повышения дальности обзора – поочерёдно веерный и узкий лучи, и на масштабе 375 км – только узкий луч. Обнаружение и обход гроз при помощи радиолокатора «Гроза». При полётах в районе грозовой деятельности радиолокатор позволяет обнаружить зоны грозовой деятельности, определять угловое положение гроз по отношению к оси самолёта, определять дальность до грозовой зоны и её протяжённость, определять степень вертикального развития грозовой зоны, определять направление обхода зон грозовой деятельности или направление наиболее безопасного пролёта участка зоны. Для обнаружения грозовых очагов и наблюдения за ними необходимо включить режим «метео» и переключателем наклона антенны установить её так, чтобы имеющаяся кучево-дождевая облачность засветилась. Грозовые зоны хорошо отражают радиоволны и наблюдаются на экране в виде ярких засвеченных пятен. В режиме «метео» антенна работает узким лучом. Для обнаружения участков с наиболее активной грозовой деятельностью необходимо включить режим «контур». Если появились тёмные провалы в отражениях грозовой зоны, то это свидетельствует о наиболее опасных местах. Чем больше величина тёмных провалов, тем больше турбулентность в них, и, следовательно, они опаснее для полёта. Обнаруживать грозовые очаги следует заблаговременно на расстоянии не менее 100-120 км. Это даёт экипажу необходимое время для принятия решения и выполнения расчётов на обход гроз или пролёта между ними. |