Воздушная навигация. Лекция 1. Основные навигационные понятия и определения
 Скачать 3.21 Mb. Скачать 3.21 Mb.
|

|
Курсом самолета называется угол, заключенный между северным направлением меридиана, проходящего через самолет и продольной осью самолета. Курс отчитывается в горизонтальной плоскости от северного направления меридиана до продольной оси самолета по ходу часовой стрелки от 0о до 360о. Курс самолета может быть истинным, магнитным и компасным в зависимости от меридиана, от которого он отсчитывается. Истинным курсом (ИК) называется угол, заключенный между северным направлением истинного меридиана, проходящего через самолет и продольной осью самолета. Магнитным курсом (МК) называется угол, заключенный между северным направлением магнитного меридиана, проходящего через самолет, и продольной осью самолета. Компасным курсом (КК) называется угол, заключенный между северным направлением магнитного меридиана, проходящего через самолет, и продольной осью самолета. Курс самолета определяется и выдерживается с помощью магнитного или астрономического компаса. Магнитный компас позволяет определить направления от компасного и магнитного меридианов. 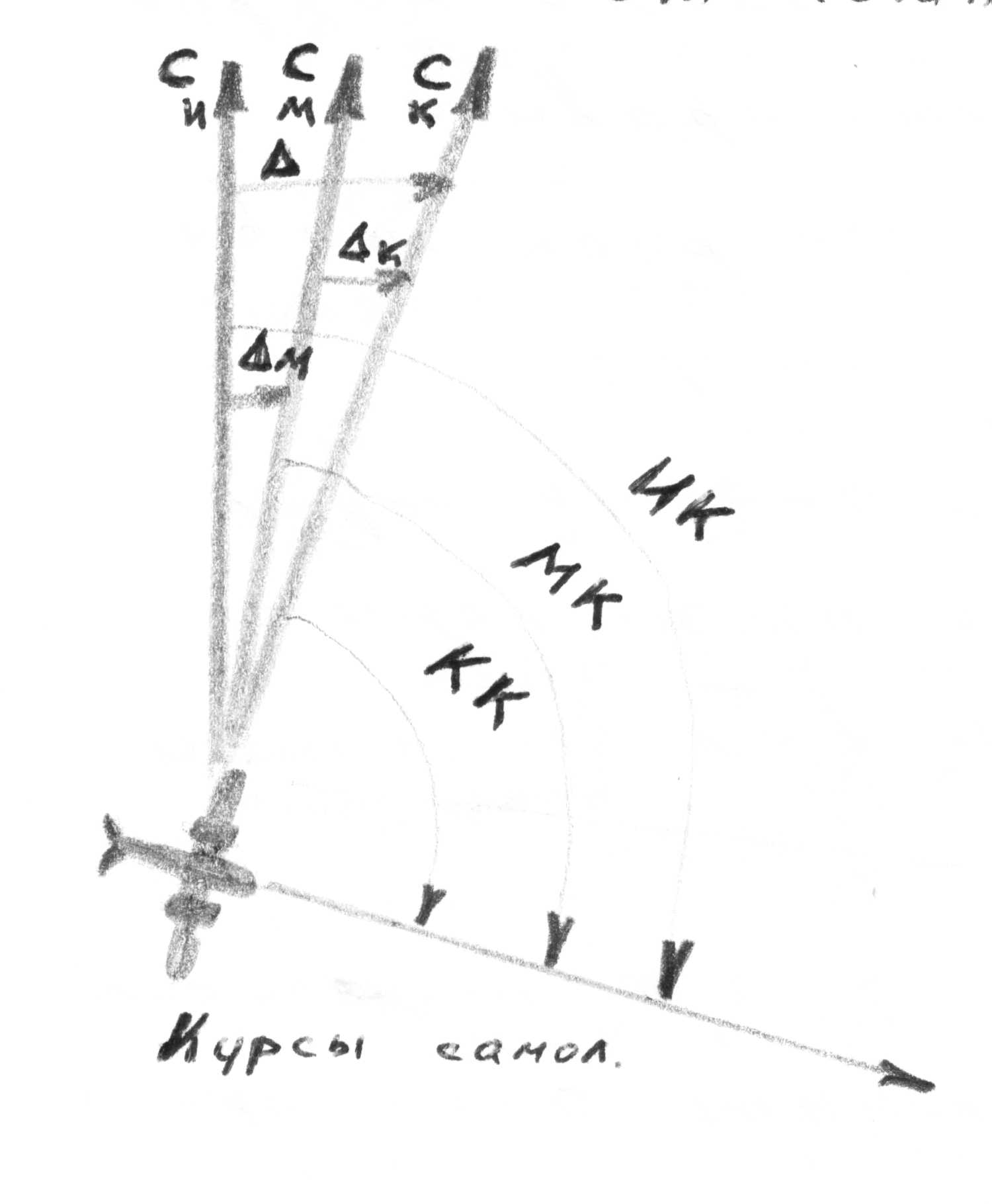 ΔМ – магнитное склонение; ΔК - девиация компаса; Δ- вариация. Заданным путевым углом может быть истинный и магнитный в зависимости от меридиана, от которого он отсчитывается. ЗМПУ называется угол, заключенный между СМ и линией заданного пути (ЛЗП). Отсчитывается от СМ и ЛЗП по часовой стрелке от 0о до 360о ЗМПУ= ЗИПУ – ( ±∆м) Магнитным пеленгом ориентира (МПО) называется угол, заключенный между См и направлением на ориентир. Отсчитывается от См к направлению на ориентир по часовой стрелке от 0о до 360о. Курсовым углом ориентира (КУО) называется угол, заключенный между продольной осью самолета и направлением на ориентир. Отсчитывается по часовой стрелке от 0о до 360о. М  ПО можно определить при помощи девиационного пеленгатора. ПО можно определить при помощи девиационного пеленгатора.Высотой полета H - называется расстояние по вертикали от самолета до уровня, принятого за начало отсчета. Высота измеряется в метрах. Знание высоты полета необходимо экипажу для выдерживания заданного профиля полета и предотвращения столкновения самолета с земной поверхностью и искусственными препятствиями, а также для решения некоторых навигационных задач. В самолетовождении в зависимости от уровня начала отсчета различают следующие высоты полета: истинную, абсолютную и барометрическую. Истинной высотой Нист называется высота полета , измеряемая относительно пролетаемой местности. В горизонтальном полете истинная высота измеряется относительно рельефа местности. Абсолютной высотой Набс называется высота полета относительно уровня Балтийского моря. Барометрической высотой Нб называется высота полета, измеряемая относительно изобарической поверхности атмосферного давления, установленного на шкале барометрического высотомера. Барометрическая высота может быть:
Основными способами измерения высоты полета является барометрический и радиотехнический. Барометрический способ - измерения высоты основан на принципе измерения высотного давления, закономерно изменяющегося с высотой. Барометрический высотомер представляет собой обыкновенный барометр, у которого вместо шкалы давлений поставлена шкала высот. Такой высотомер определяет высоту полета косвенным путем, измеряя атмосферное давление, которое изменяется с высотой по определенному закону. Радиотехнический способ - измерения высоты основан на использовании закономерностей распространения радиоволн. Радиоволны распространяются с постоянной скоростью и отражаются от различных поверхностей. Используя эти свойства можно определить высоту полета самолета. Различают воздушную и путевую скорости самолета, измеряются они в км/час. Воздушной скоростью V называется скорость самолета относительно воздушной среды, Эту скорость самолет приобретает под действием тяги двигателей. Воздушная скорость зависит от аэродинамических качеств самолета, его полетного веса и плотности воздуха. Ветер не оказывает влияние на его величину и направление, которое при симметричной тяге двигателей совпадает с продольной осью самолета. Воздушная скорость измеряется указателем воздушной скорости. Путевой скорость. V – называется скорость самолета относительно земной поверхности. На ее величину влияет ветер, который уменьшает или увеличивает скорость ВС относительно земной поверхности. Путевую скорость самолета рассчитывают или измеряют с помощью специальных приборов. При полете с боковым ветром векторы воздушной путевой скорости и скорости ветра образуют навигационный треугольник скоростей, каждый вектор характеризуется направлением и величиной. Вектором воздушной скорости - называется направление с скорость движения самолета относительно воздушных масс. Его направление определяется курсом самолета, а величина- значением воздушной скорости. Вектором путевой скорости - называется направление с скорость движения самолета относительно земной поверхности. Его направление определяется путевым углом, а величина- значением путевой скорости. Вектором ветра называется направление и скорость движения воздушной массы относительно земной поверхности. Его направление определяется направлением ветра, а величина- значением скорости. 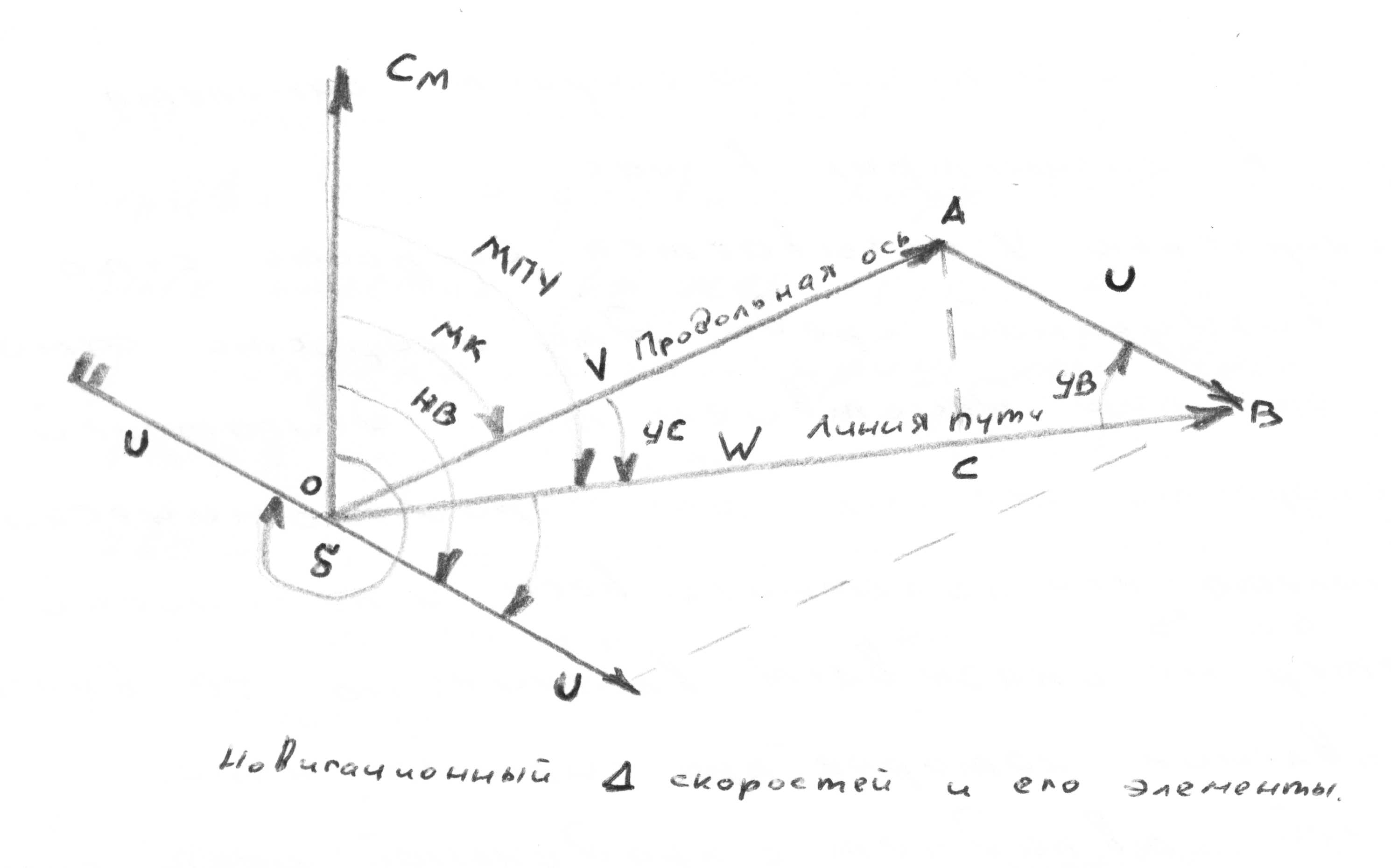 МК- магнитный курс самолета; V – воздушная скорость; МПУ- магнитный путевой угол; W –путевая скорость; НВ- навигационное направление ветра; U – скорость ветра; УС- угол сноса; УВ – угол ветра. Фактическим магнитным углом называется угол, заключенный между См и линией фактического пути. Отсчитывается от См до ЛФП по ходу часовой стрелки от 0о до 360о. Углом сноса называется угол, заключенный между продольной осью самолета и линией пути. Отсчитывается от линии пути вправо со знаком «+» и влево со знаком «-». Углом ветра называется угол между линией пути и направлением навигационного ветра. Отсчитывается от линии пути до направления ветра по ходу часовой стрелки от 0о до 360о. Контрольные вопросы: 1. Что называется визуальной ориентировкой ? 2. Какие факторы влияют на ведение визуальной ориентировки ? 3. Какие правила следует соблюдать при ведении визуальной ориентировки ? 4. Что называется магнитным пеленгом ориентира ? 5. Что называется курсовым углом ориентира ? Ключевые слова: Ориентир, линейный ориентир, площадный ориентир, точечный ориентир, истинный курс, магнитный курс, компасный курс, МПО, КУО, высота полета, вектор воздушной скорости, вектор путевой скорости Лекция №9 Применение доплеровского измерителя путевой скорости и угла сноса. Навигационные характеристики ДИСС, принцип измерения путевой скорости, угла сноса с помощью ДИСС. Курсо-доплеровское измерение координат ВС, курсо-доплеровский навигационный комплекс. План: 1. Общие понятия о навигационных элементах полета. 2. Принцип работы ДИСС. 3. Погрешности измерения путевой скорости и угла сноса. 4. Курсо-доплеровское счисление координат ВС. 5. Курсо-доплеровские навигационные комплексы. Путевая скорость (W) – это скорость воздушного судна (ВС) относительно земной поверхности. Она зависит от воздушной скорости, скорости и направления ветра. Ее можно рассчитать или измерить с помощью технических средств самолетовождения. Путевая скорость измеряется в километрах в час (км/час). Путевую скорость по пройденному расстоянию и времени полета находят по формуле W= S/t. Решение ее на НЛ-10.  Углом сноса называется угол, заключенный между продольной осью ВС и линией пути. Отсчитывают его от продольной оси ВС до линии пути вправо со знаком плюс и влево со знаком минус. Может быть расчетным и фактическим. Расчетный рассчитывается от ЛЗП, а фактический до ЛФП. Навигационные элементы полета – путевая скорость и угол сноса в зависимости от располагаемых средств самолетовождения на борту ВС измеряются автоматически непрерывно или дискретно экипажем. Автоматические средства самолетовождения- инерциальные навигационные системы и доплеровские измерители позволяют непрерывно в течении всего полета измерять путевую скорость и угол сноса. Эти средства являются полностью автономными, так как не требуют дополнительного наземного оборудования. При использовании инерциальных навигационных систем путевая скорость и угол сноса вырабатываются автоматически и выдаются на индикаторы обычно по мере необходимости. Измерение путевой скорости и угла сноса доплеровским измерителем (ДИСС) основано на замере разности частот радиосигналов, излученных радиопередатчиком ДИСС и принятых обратно после отражения их от земной или водной поверхности. Условия отражения радиоволн от земной или водной поверхности оказывают влияние на точность измерения. Для устранения ошибки путевой скорости из-за морского эффекта в ДИСС вводится калибровочная поправка, соответствующая среднему состоянию водной поверхности. Более совершенные ДИСС имеют специальную схему автоматического учета отражающих свойств поверхности. При изменении режима полета, при наборе высоты и снижении, разгоне и торможении, а также при изменении полетной массы ВС изменяется и угол тангажа. У ДИСС с нестабилизированными антеннами это приводит к изменению наклона диаграммы излучения в вертикальной плоскости и к завышению показаний путевой скорости. Повышение точности измерения путевой скорости по этой причине достигается двумя путями. Наиболее простой из них заключается в переводе ДИСС в режим «ПАМЯТЬ», если продольный крен ВС приводит к возникновению ошибок, превышающих допустимые. Другое направление реализуется в тех ДИСС, расчет путевой скорости у которых выполняется не самим прибором, а бортовой ЦВМ. В этом случае аналитически рассчитать и учесть поправки. При продолжительных поперечных кренах, например при развороте ВС, ДИСС переходит при развороте ВС, ДИСС переходит в режим «ПАМЯТЬ». Доплеровские измерители непрерывно измеряют угол сноса. Достигается это либо разворотом антенной системы ДИСС по направлению вектора W и отсчетом УС относительно продольной оси ВС, либо аналитически, если антенна закреплена неподвижно, а на борту ВС имеется ЦВМ. При отсутствии на борту ВС ИНС или ДИСС путевая скорость, угол сноса и ФПУ могут определяться в полете экипажем дискретно по мере необходимости с помощью оптических и радиотехнических средств. В основе всех способов дискретного измерения НЭ лежит оценка перемещения ВС относительно земной поверхности. На контрольном этапе для измерения W и УС экипажу необходимо располагать зафиксированными на полетной карте точками фактических МС. По измеренному расстоянию Sкэ между ни ми и времени полета рассчитывается путевая скорость W= SКЭ : ( Тк-Тн), где Тн, Тк - время пролета начала и конца КЭ. Точность измерения зависит от частных погрешностей определения МС, графической работе на карте и отсчета времени. 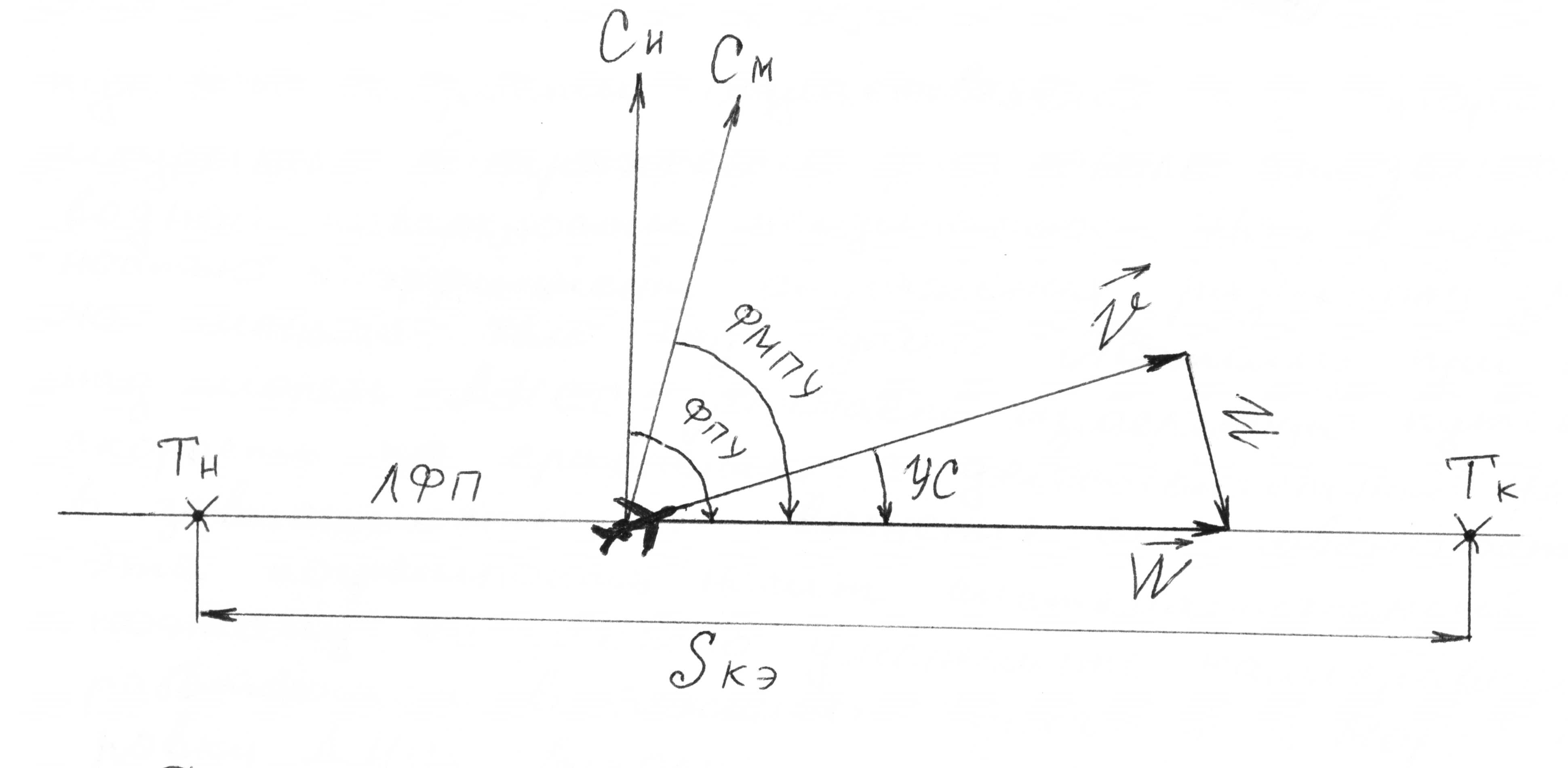 Доплеровский измеритель (ДИСС) непрерывно измеряет путевую скорость и угол сноса и выдает их значения на указатель и в автоматическое навигационное устройство, куда поступают также сигналы курса от курсовой системы ВС и истинная воздушная скорость от датчика воздушной скорости. По этим данным АНУ ведет автоматическое счисление пути. Измеритель ДИСС может работать в трех режимах: «Суша», « Море», «Память». Режим «Суша» включается при полетах над земной поверхностью. Режим «Море» включается при полетах над водной поверхностью. Режим «Память» измеритель не производит измерения путевой скорости и угла сноса, а выдает потребителям запомненные значения этих величин. Измеритель ДИСС имеет систему встроенного контроля, которая обеспечивает контроль работоспособности измерителя при наземных проверках и в полете. Индикация УС осуществляется постоянно на индикаторе ДИСС, НПП штурмана, а также на приборах НПП пилотов при работе САУ в режимах «Курс» и « Навигация». Индикация путевой скорости осуществляется индикатором ДИСС штурмана. Отражение радиоволн от земной и водной поверхности неодинаково. Над водной поверхностью коэффициент отражения радиоволн значительно меньше, чем над сушей. Поэтому при полете над морем ДИСС занижает измеренную путевую скорость по сравнению с действительной на 1-3,7%. В зависимости от волнения его поверхности. Эта погрешность носит систематический характер, поэтому ее можно уменьшить калибровкой ДИСС, работающего в режимах «Суша» и «Море». Калибровку ДИСС выполняют для средней степени волнения воды. Поэтому путевая скорость, измеренная доплеровским измерителем при полете над морем несколько отличается от фактической в следствии остаточной погрешности. Указатель путевой скорости и угла сноса ( см.рис.) предназначен для указания текущего значения путевой скорости и угла сноса. 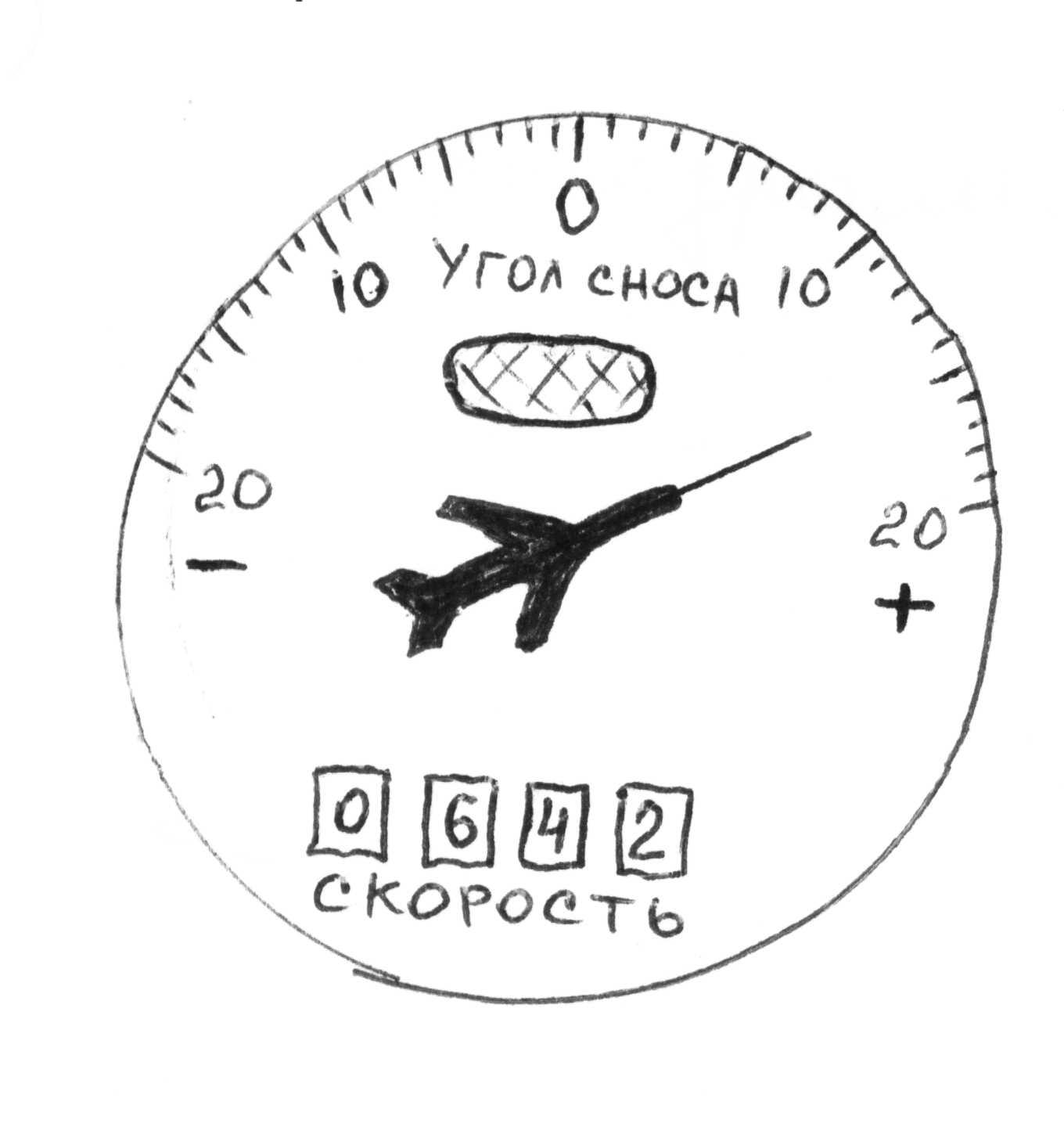 При курсо- доплеровском счислении координат используется информация о путевой скорости и угле сноса от ДИСС и курса полета от КС (курсовой системы), а также величина вручную вводимого угла карты (βк), измеряемого от положительного направления начала отсчета путевого угла ( и курса) до оси. Одновременно значения путевой скорости и угла сноса подаются в навигационный вычислитель, который осуществляет счисление пройденного самолетом пути по осям в ортодромической системе координат. Навигационный вычислитель связан с курсовой системой и задатчиком угла карты. При установку на задатчике МУК= ОЗПМУ координатная ось совмещается с ЛЗП. Сигналы курса ВС, поступающие от курсовой системы , и сигналы угла сноса, поступающего от доплеровского измерителя, складывается и их сумма сравнивается с ОЗПМУ, установленным на задатчике угла карты. В основу работы навигационного вычислителя положено автоматическое определение углового бокового уклонения ВС, т.е. решение равенства: При курсо- доплеровском счислении координат используется информация о путевой скорости и угле сноса от ДИСС и курса полета от КС (курсовой системы), а также величина вручную вводимого угла карты (βк), измеряемого от положительного направления начала отсчета путевого угла ( и курса) до оси. Одновременно значения путевой скорости и угла сноса подаются в навигационный вычислитель, который осуществляет счисление пройденного самолетом пути по осям в ортодромической системе координат. Навигационный вычислитель связан с курсовой системой и задатчиком угла карты. При установку на задатчике МУК= ОЗПМУ координатная ось совмещается с ЛЗП. Сигналы курса ВС, поступающие от курсовой системы , и сигналы угла сноса, поступающего от доплеровского измерителя, складывается и их сумма сравнивается с ОЗПМУ, установленным на задатчике угла карты. В основу работы навигационного вычислителя положено автоматическое определение углового бокового уклонения ВС, т.е. решение равенства:БУ= ( ОМК+ УС) – ОЗПМУ Если сумма курса и УС равна ОЗМПУ, то вектор путевой скорости ВС совмещен с координатной осью. Если это равенство не обеспечивается, то вектор W раскладывается навигационным вычислителем на две составляющие. Одна из них направлена по направлению ЛЗП, а другая – перпендикулярно ЛЗП. Суммирование углов и разложение путевой скорости на составляющие по осям происходит непрерывно электромеханическим способом. Полученные составляющие W интегрируются по времени специальными моторчиками, которые и выдают на счетчик координат текущие значения координат места ВС в виде пройденного пути по ортодромии и линейного бокового уклонения. Контрольные вопросы : 1. Что является навигационными элементами полета ? 2. На чем основано измерение путевой скорости и угла сноса ? 3. В каких режимах может работать ДИСС ? 4. Для чего предназначен указатель путевой скорости ? 5. Как вводится угол карты? Ключевые слова: путевая скорость, угол сноса, ДИСС, калибровочная поправка, УПС Лекция № 10. Неавтономные системы навигации. План: 1. Общая характеристика угломерных радионавигационных систем. 2. Принцип действия угломерных радионавигационных систем 3. Полеты по наземным радиомаякам VOR. 4. Применение аппаратуры VOR-ILS в полете. 5. Использование радиокомпасов при полетах на больших высотах и скоростях. Угломерно-дальномерная система ближней навигации непрерывно подает на индикаторные приборы текущие полярные координаты самолета относительно наземного маяка системы. Полярные координаты самолета: - азимут или истинный пеленг самолета (ИПС) – угол, заключенный между северным направлением истинного меридиана, проходящего через точку установки наземного радиомаяка и направлением на самолет; азимут выдается с точностью до 0,250; - дальность или расстояние от маяка до самолета – радиус орбиты, проведенный из точки установки маяка через МС: точность измерения дальности ±200М. Система с высокой точностью решает следующие задачи: а) непрерывное указание экипажу азимута на самолете и дальности; б) самолетовождение по заданному маршруту; в) определение навигационных элементов в полете; вывод самолета любую заданную точку и сигнализация ее пролета; наземное наблюдение, опознавание, определение координат самолета и управление его движением. Принцип действия. Азимут задается временным интервалом между начальным временем отсчета, одинаковым для всех самолетов, находящихся в зоне действия маяка и оборудованных соответствующим оборудованием, аппаратурой и моментом приема азимутального сигнала каждого из этих самолетов. Наземный маяк системы включает в себя передающую азимутальную антенну с узконаправленной диаграммой излучения (в горизонтальной плоскости), вращающуюся со скоростью 100 об/ мин. и антенну опорных сигналов со всенаправленной диаграммой излучения. Северный опорный сигнал передается этой антенной в момент прохождения азимутальной антенны нулевого азимута ( северного направления истинного меридиана). Определение дальности осуществляется по принципу «запрос- ответ» путем измерения суммарного времени распространения запросного сигнала с самолета на землю и ответного сигнала с земли на самолет. Это время с достаточной точностью преобразуется в измеряемое расстояние, так что скорость распространения электромагнитной энергии постоянна. Наземный маяк системы имеет индикатор кругового обзора (ИКО) для получения на экране электронно- лучевой трубки отметок самолетов, совершающих полет в зоне действия маяка. Система работает в диапазоне УКВ и поэтому ее рабочая область определяется высотой полета и нерабочей воронкой с радиусом, равным высоте полета, расположенной непосредственно над наземной станцией. Полет в режиме «Азимут» может производиться в случае, если ЛЗП или ее продолжение проходит через точку установки наземного маяка системы ( рис1). В этом режиме полет может осуществляться по двум вариантам: « от маяка» и «на маяк». В первом случае ИПС ( азимут) все время должен сохраняться равным значению заданного истинного путевого угла ЗИПУ, во втором- ЗИПУ±180о. В обоих случаях значение ЗИПУ при помощи поворота шкалы курсов прибора КПП выставляют под неподвижным оранжевым индексом. Во всех случаях полета отклонение вертикальной стрелки нуль-индикатора влево от центра шкалы свидетельствует об уходе самолета вправо от ЛЗП, а отклонение стрелки нуль- индикатора вправо сигнализирует о левом уклонении самолета от ЛЗП. Таким образом, центр шкалы прибора представляет собой самолет, а вертикальная стрелка- линию заданного пути. Контроль пути по дальности обеспечивается наблюдением за текущей дальностью, сопоставлением ее с дальностью контрольных точек и по загоранию сигнальных ламп. Путевую скорость в этом режиме определяют следующим образом: При полете от маяка W= (Д2-Д1) / t; При полете на маяк W= ( Д1-Д2) / t. |
