привод-оксана. Методические пособие
 Скачать 2.43 Mb. Скачать 2.43 Mb.
|

1.Основное уравнение движения электропривода.Для электромеханической системы в любой момент времени должно выполняться условие баланса мощностей: где В свою очередь уравнение для кинетической энергии запишется:  Или для динамической мощности:  Если  Приравняв значения мощностей, получим:  Эта зависимость является уравнением движения электропривода. Для большинства механизмов Проанализируем это уравнение: Пусть момент, развиваемый двигателем, больше статического М > МСТ. Значит М < МСТ. Ускорение отрицательно. Идет торможение привода. М = МСТ. Ускорение равно нулю. Это соответствует установившемуся режиму: либо двигатель стоит, либо вращается с постоянной скоростью. Основное уравнение движения электропривода является основой всех инженерных расчетов. На его основе производится расчет, например, диаграммы двигателя, выбирается двигатель, рассчитываются пусковые моменты и токи, оценивается динамика электропривода. 2.Основные понятия об устойчивости электропривода.Устойчивость электропривода определяется при сравнении механической характеристики двигателя и механической характеристики исполнительного механизма ( 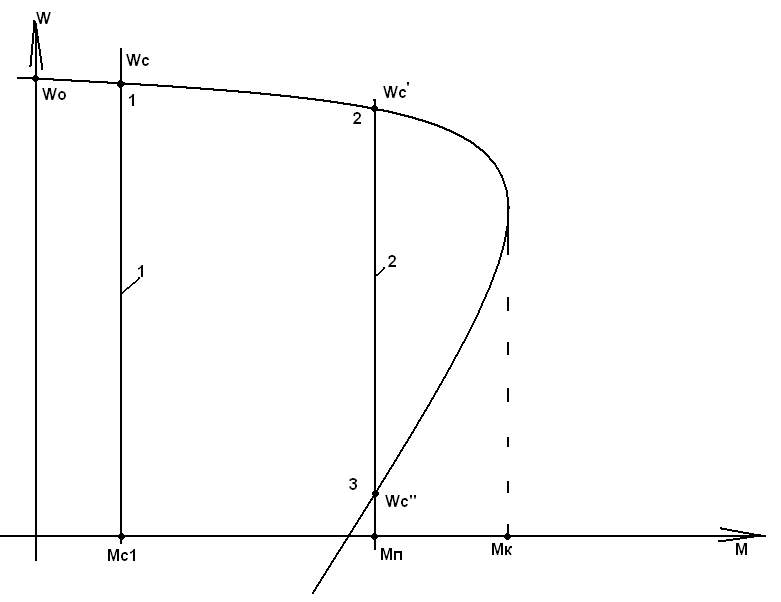 Рассмотрим для трех механических характеристик исполнительных механизмов: В этом режиме двигатель преодолевает момент нагрузки и момент механических потерь. Режим работы устойчивый. В таком режиме мы имеем две точки пересечения (2 и 3). Устойчивой является скорость Для точки 3 w M. 3.Определение времени пуска и торможения электроприводаВремя пуска можно определить исходя из основного уравнения движения электропривода: Выделим из этого уравнения составляющую времени: Проинтегрировав это выражение получим: Данным уравнением определяется время нарастания скорости от 0 до конечной (установившейся). Время торможения может быть вычислено по следующей формуле: |