привод-оксана. Методические пособие
 Скачать 2.43 Mb. Скачать 2.43 Mb.
|

14.Основные показатели регулирования скорости электродвигателей. Способы регулирования скорости электродвигателей постоянного тока последовательного возбуждения.Для оценки различных способов регулирования скорости существуют следующие параметры: Диапазон регулирования: Плавность регулирования – характеризуется числом устойчивых скоростей, получаемых в данном диапазоне регулирования; Экономичность регулирования. Оцениваются капитальные затраты, потери электроэнергии; Направление возможного регулирования. Вверх или вниз от скорости, определяемой естественной характеристикой. Регулировать скорость двигателей постоянного тока последовательного возбуждения возможно изменением подводимого напряжения и изменением сопротивления якорной цепи. Р 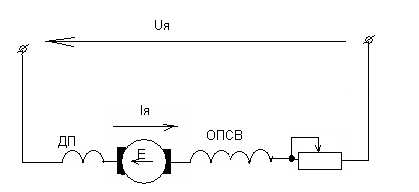 егулирование скорости изменением сопротивления якорной цепи. егулирование скорости изменением сопротивления якорной цепи. Введение RД.Я в цепь уменьшает жесткость характеристики и ограничивает IЯ. Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения. 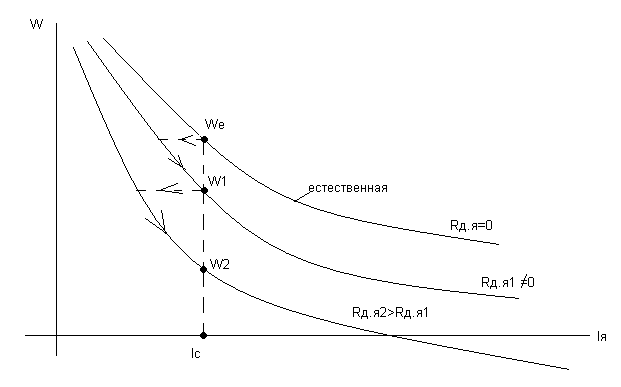 Регулирование скорости изменением подводимого напряжения. Все вышесказанное про данный способ регулирования применительно к двигателям постоянного тока независимого возбуждения, в полной мере относится и к двигателям постоянного тока последовательного возбуждения. 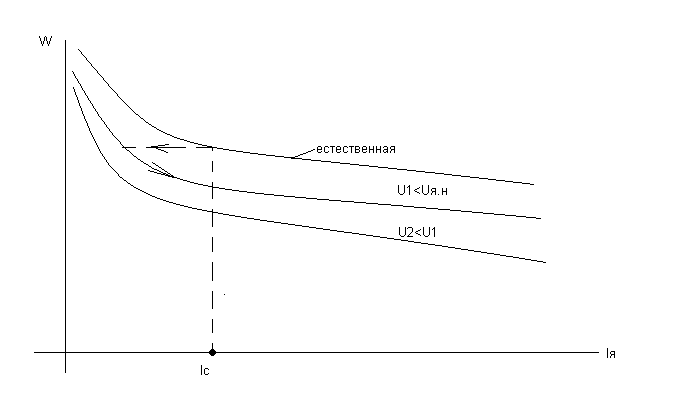 15.Расчет тормозных сопротивлений двигателя постоянного тока независимого возбуждения (RДТ, RП).Расчет производится для режимов динамического торможения и противовключения. Режим противовключения. 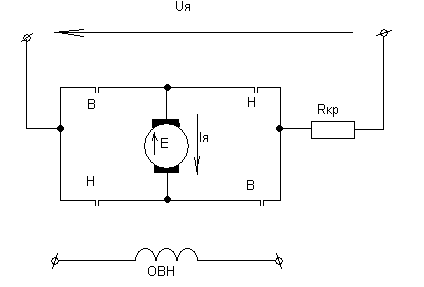 При переключении «В» на «Н» изменится направление IЯ , и следовательно направление момента  Для ограничения тока якоря вводится RКР. 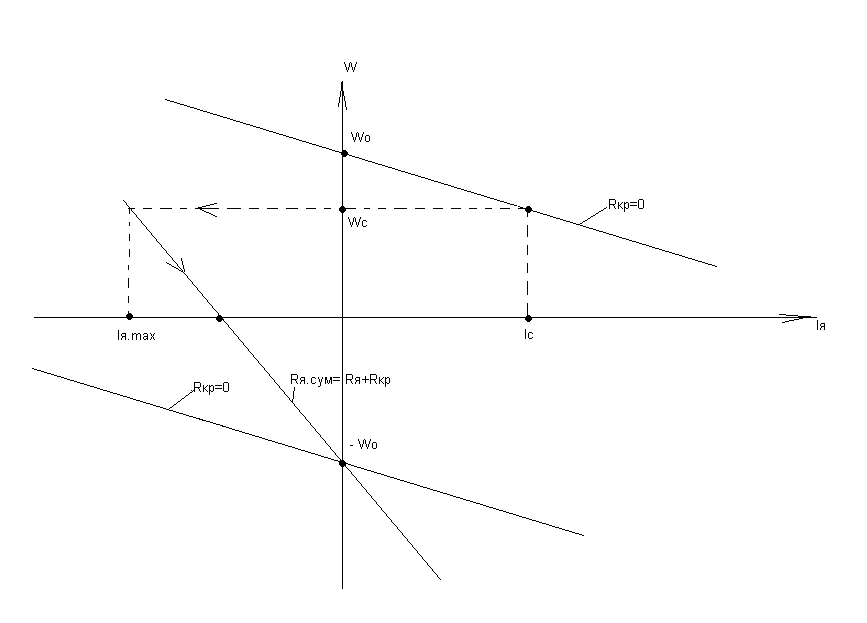 При этом бросок IЯ ограничен значением IЯ.max. RКР определяется из: Ток якоря ограничивается на уровне 2,5 от номинального. Динамическое торможение. 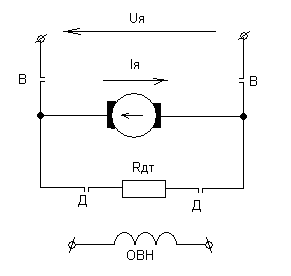 В режиме динамического торможения электродвигатель отключается от сети и его якорные зажимы замыкаются на RД.Т. В этом режиме кинетическая энергия механизма и двигателя расходуется на его нагрев. При отключении двигателя от сети и включении «Д» двигатель по инерции продолжает вращаться в ту же сторону, но IЯ меняет свое направление, т.к. источником становится двигатель  . .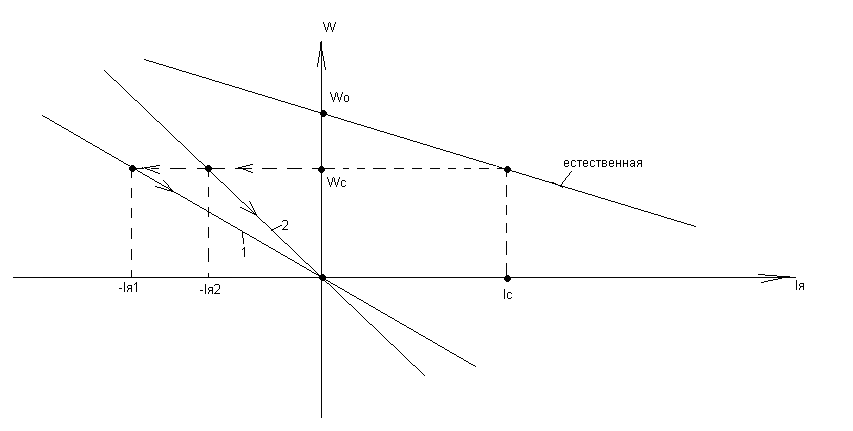 Очевидно, что при |