привод-оксана. Методические пособие
 Скачать 2.43 Mb. Скачать 2.43 Mb.
|

10.Механические характеристики двигателей постоянного тока последовательного возбуждения.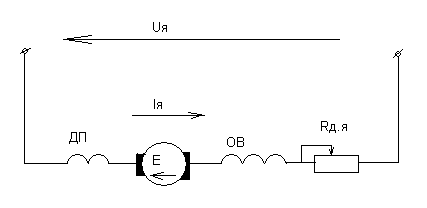 Рисунок 1 – Схема включения двигателя постоянного тока последовательного возбуждения. Для двигателя последовательного возбуждения уравнение механической характеристики имеет вид:  И электромеханическая:  И имеет следующий вид: 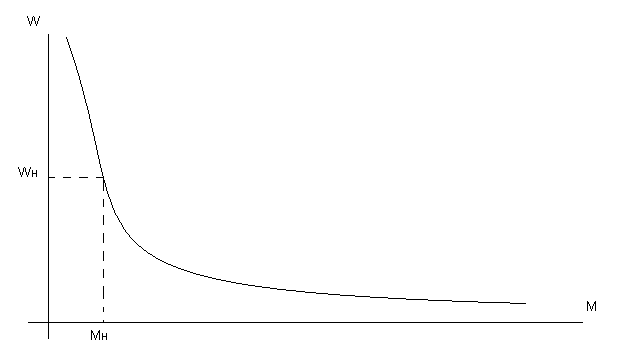 Вид характеристики – гиперболический – показывает, что при уменьшении момента скорость двигателя неограниченно возрастает. Физически это объясняется условиями электрического равновесия: при Аналогичный вид имеет и электромеханическая характеристика. Практически в области номинальной нагрузки машина насыщается и увеличение 11.Способы торможения двигателей постоянного тока последовательного возбуждения.Существует три способа торможения двигателей постоянного тока последовательного возбуждения: Динамическое торможение с самовозбуждением; Динамическое торможение с питанием сериесной обмотки от постороннего источника; Торможение противовключением. Динамическое торможение с самовозбуждением. 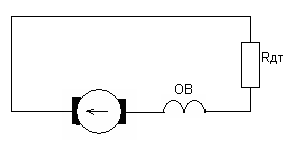 Режим динамического торможения для таких двигателей отличается от аналогичного режима для двигателей постоянного тока с независимым возбуждением тем, что тормозной момент зависит от потока, который зависит от тока якоря. Следовательно, жесткость характеристики, с уменьшением скорости и ЭДС, будет уменьшаться (интенсивность торможения не постоянна). 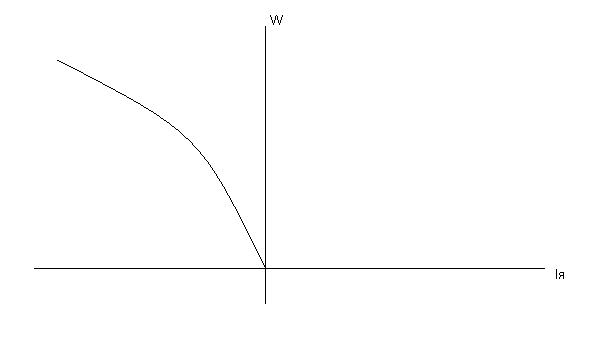 Достоинство данного метода состоит в простоте исполнения. Недостатки метода: При уменьшении скорости тормозной момент уменьшается значительно быстрее, чем скорость; При малых скоростях торможение получается малоэффективным. Торможение противовключением. Такой режим возможен, когда электродвигатель включен для вращения в одну сторону, а под действием момента нагрузки якорь двигателя вращается в противоположную сторону (генераторный режим). Этот режим можно получить переключением обмоток якоря на ходу. 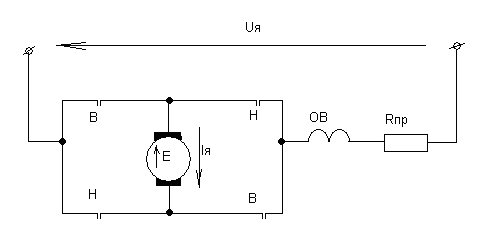 При переключении «В» на «Н» изменится направление IЯ , и следовательно направление момента  Для ограничения тока якоря вводится RПР. 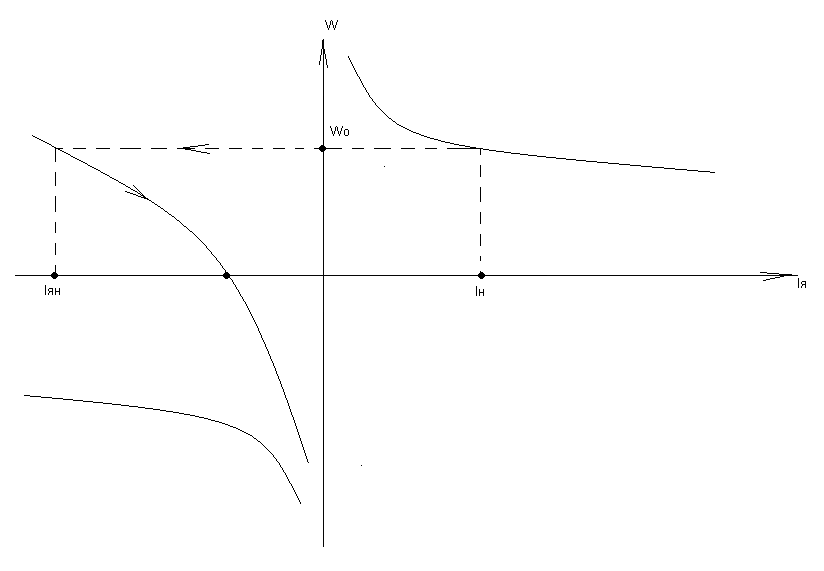 При этом бросок IЯ ограничен значением IЯ.max. RПР определяется из: В момент равенства w=0 необходимо отключить двигатель от сети. В этом режиме: Динамическое торможение с питанием сериесной обмотки от постороннего источника. На обмотку возбуждения подается напряжение такой полярности, чтобы Е не изменяла своего знака. Якорь замыкается на сопротивление динамического торможения и режим полностью аналогичен режиму динамического торможения двигателей постоянного тока с независимым напряжением. Последовательно с обмоткой возбуждения включается сопротивление. 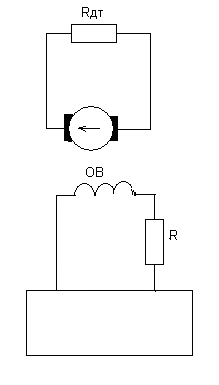 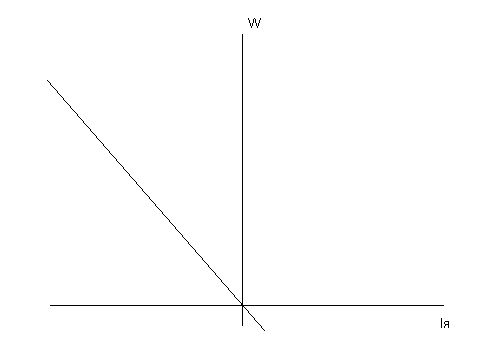 |