привод-оксана. Методические пособие
 Скачать 2.43 Mb. Скачать 2.43 Mb.
|

20.Расчет ступени противовключения для асинхронного двигателя.Расчет ступени противовключения производится графоаналитическим методом. 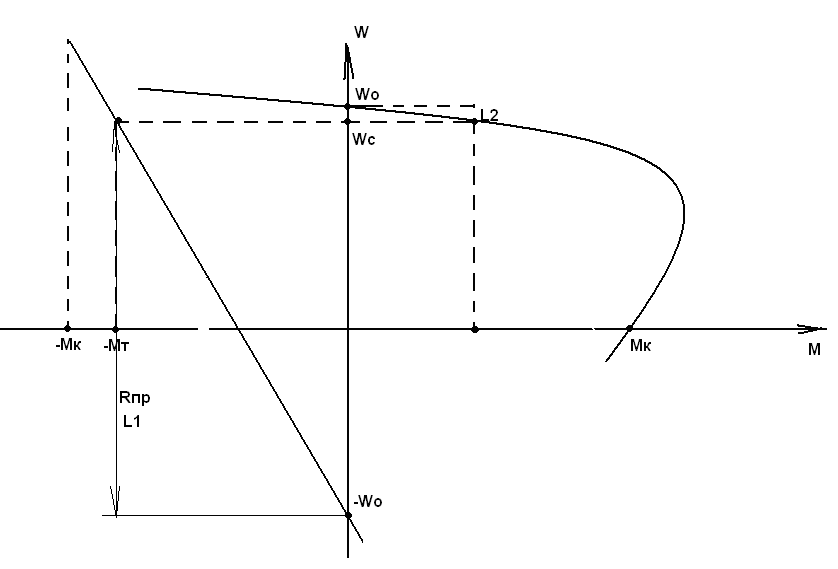 ∆ w соответствует сопротивлению двигателя. По пропорции определяется Rпр. Сопротивление противовключения выбираем исходя из допустимого тормозного момента. 21.Торможение асинхронного двигателя противовключением.Производится при переключении двух любых фаз. Магнитное поле при этом будет вращаться противоположно вращению ротора, а электромагнитный момент будет тормозным. В 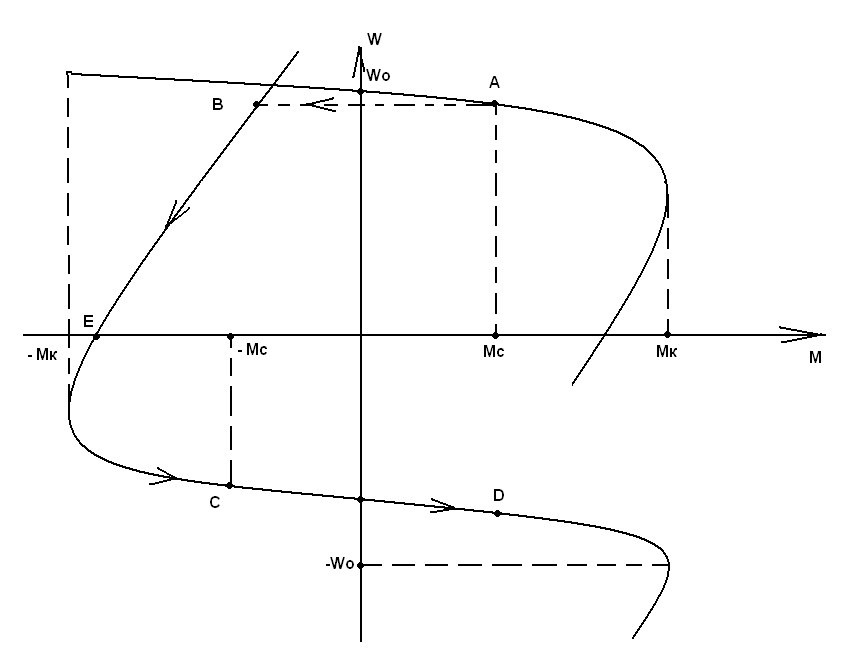 точке Е двигатель отключается от сети. точке Е двигатель отключается от сети.Для Мс реактивного – АВС. Для Мс активного – АВСD. Для АД с фазным ротором в момент противовключения в цепь ротора вводится сопротивление противовключения для ограничения тока ротора. 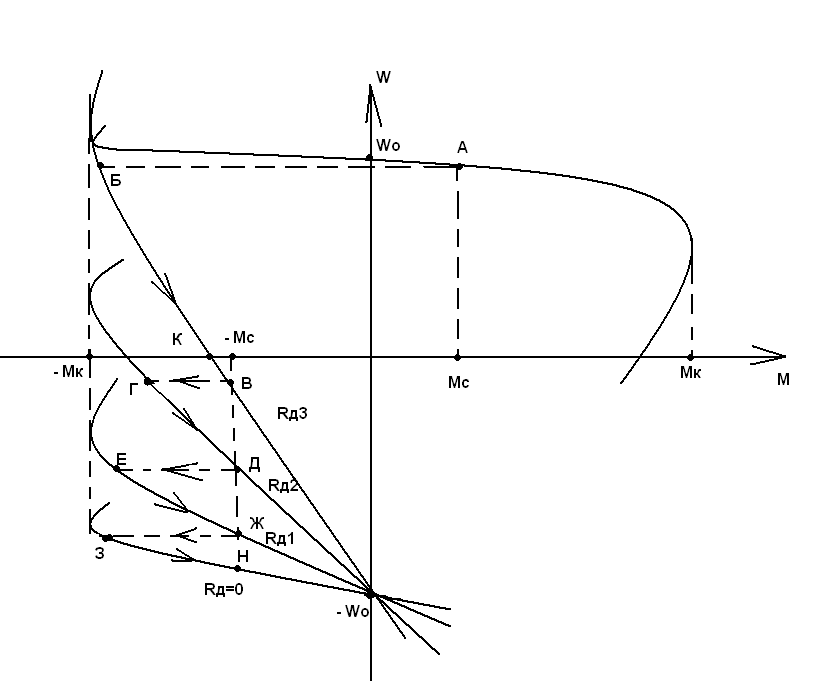 Rд3=Rкр+Rд После изменения направления вращения двигатель может быть разогнан до Wc по А-Б-В-Г-Д-Е-Ж-З-Н. В случае торможения до «0» в точке К двигатель отключается от сети. Способ торможения противовключением эффективен, прост, обеспечивает малое время торможения. Недостаток – значительные потери энергии 22.Регулирование скорости асинхронных двигателей.Если проанализировать влияние параметров асинхронного двигателя на его механические характеристики:  то можно сделать вывод о возможности регулирования скорости АД: Изменением числа пар полюсов; Изменением сопротивления в цепи ротора; Изменением напряжения U1; Изменением сопротивления в цепи статора; Изменением частоты подводимого напряжения. Регулирование скорости АД изменением числа пар полюсов. Изменение числа пар полюсов обеспечивает ступенчатое регулирование синхронной скорости  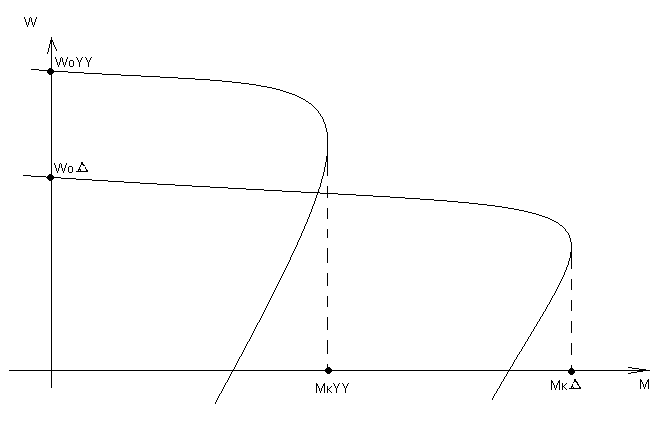 К достоинству этого способа можно отнести простоту его реализации и отсутствие больших потерь скольжения. Главным его недостатком является ограниченное число ступеней регулирования. Регулирование скорости АД изменением сопротивления в цепи ротора. Этот способ применим только для АД с фазным ротором. При введении и изменении сопротивления в цепи ротора изменяется критическое скольжение АД а МК и w0 остаются без изменений. 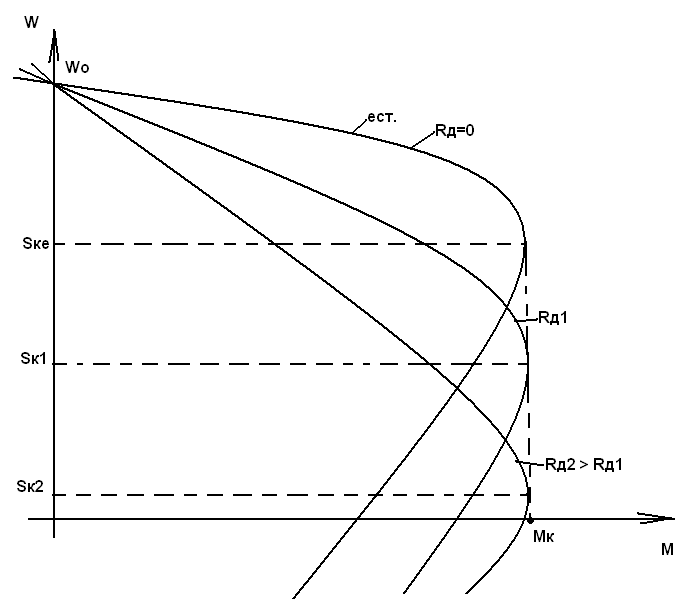 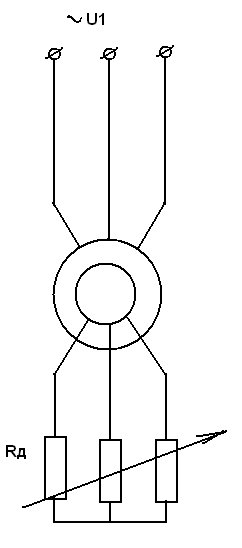 Этот способ отличает простота и дешевизна. Область применения ограничена механизмами у которых момент нагрузки изменяется в зависимости от скорости в небольших пределах. Регулирование скорости АД изменением напряжения. Данный способ применяется преимущественно для АД с короткозамкнутым ротором. Изменение U1 приводит к изменению критического момента, без изменения w0 и SК. 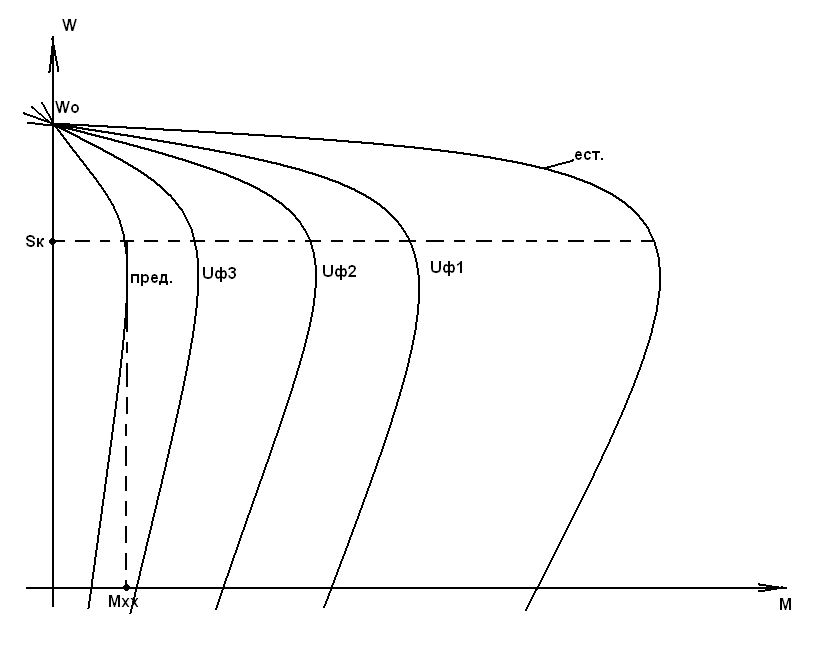 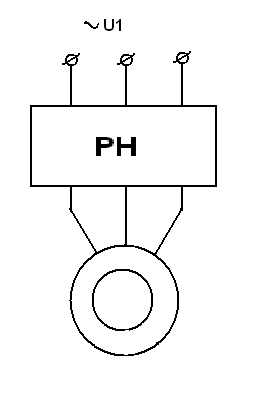 При снижении напряжения, подводимого к статору, изменяется поток, что при МС=const приводит к увеличению тока и возрастанию потерь. Поэтому приведенный способ регулирования применяется для механизмов, имеющих вентиляторную нагрузку (т.е. при w МС). Для таких механизмов данный способ нашел большое применение при использовании электродвигателей мощностью 20…30 кВт. Регулирование скорости АД изменением сопротивления статора. Регулирование скорости по этому способу возможно в сторону снижения. Способ очень схож с регулированием скорости изменением напряжения. При изменении R1 изменяется как критический момент, так и критическое скольжение. 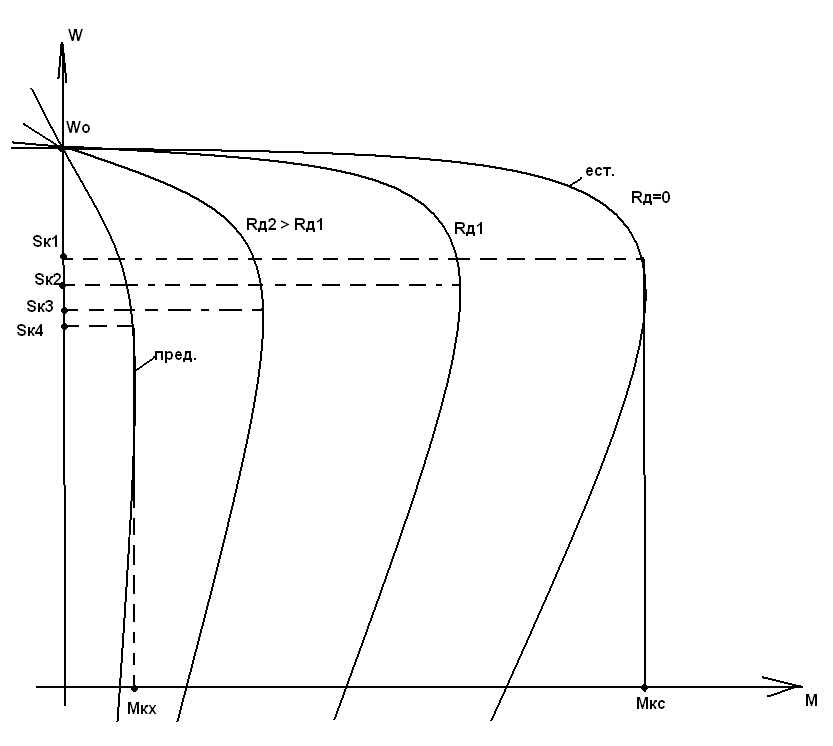 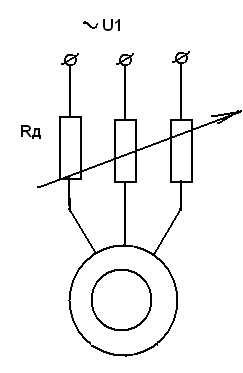 Применяется преимущественно для АД с короткозамкнутым ротором. Регулирование скорости АД изменением частоты подводимого напряжения. Этот способ применим как для отдельных АД, так и для АД приводящих во вращение группы механизмов. Возможность регулирования скорости вытекает из выражения: Следует учитывать, что при изменении частоты изменяется и индуктивное сопротивление АД, поэтому будет изменяться значения  и характеристики будут иметь следующий вид: и характеристики будут иметь следующий вид: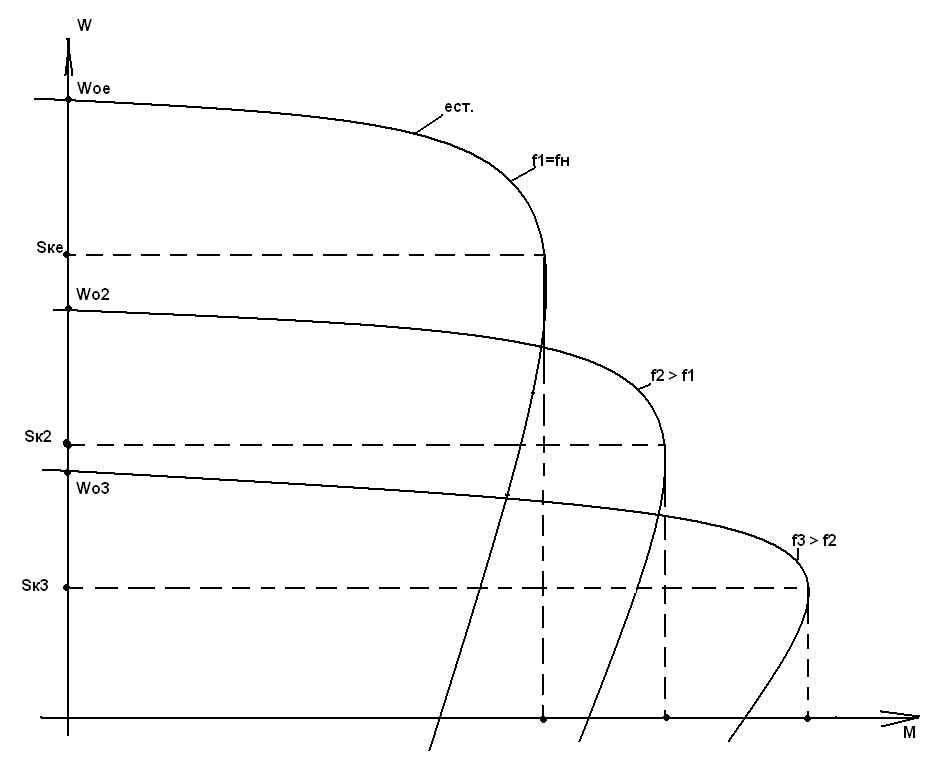  Основным недостатком электроприводов с частотным управление является необходимость использования преобразователей частоты. Чтобы критический момент был постоянным, необходимо поддерживать постоянным следующее соотношение |