привод-оксана. Методические пособие
 Скачать 2.43 Mb. Скачать 2.43 Mb.
|

23.Расчет пусковых сопротивлений асинхронных двигателей.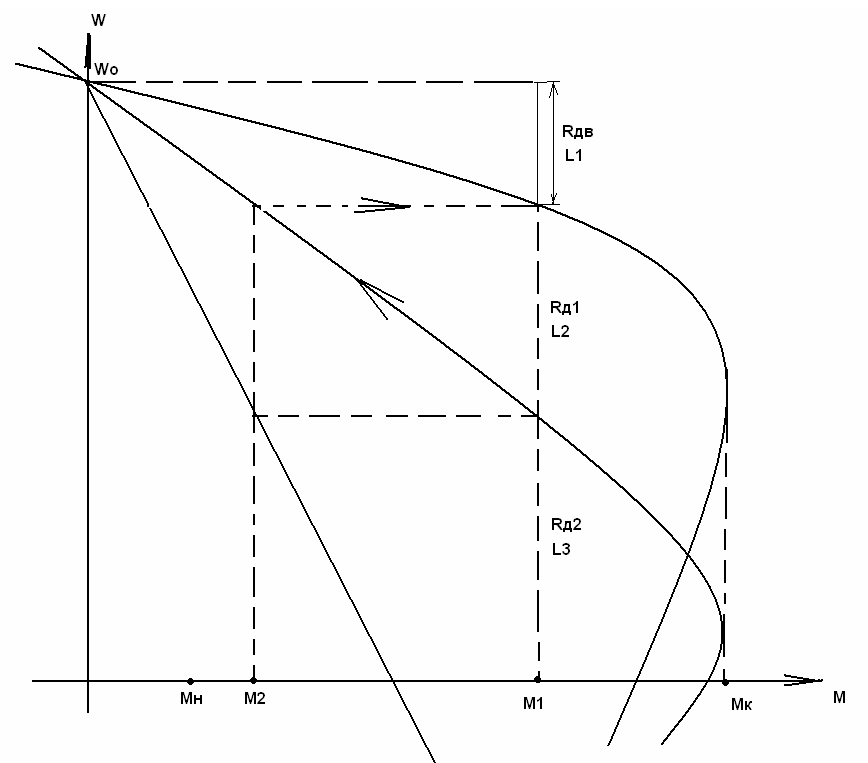 Расчет производится графоаналитическим методом. Строятся характеристики в зависимости от желаемого количества ступеней. Выбираются моменты ∆ w соответствует сопротивлению двигателя. Составляем пропорцию и находим Rд1 и Rд2.  24.Регулирование скорости электродвигателей в системе Г-Д. Механические характеристики системы Г-Д. Диапазоны регулирования.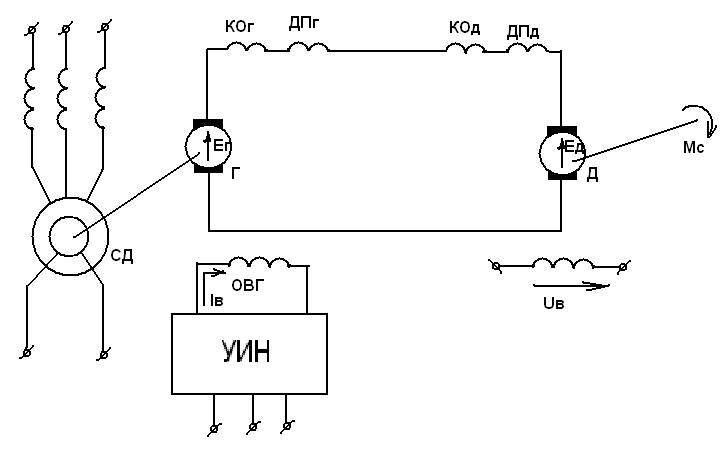 Система Г-Д представляет из себя регулируемый источник постоянного тока на базе генератора, приводимого во вращение, обычно при помощи синхронного двигателя (возможен привод от любого механического источника энергии). На рисунке приведена регулировочная характеристика генератора постоянного тока независимого возбуждения, из которой следует, что в диапазоне изменения 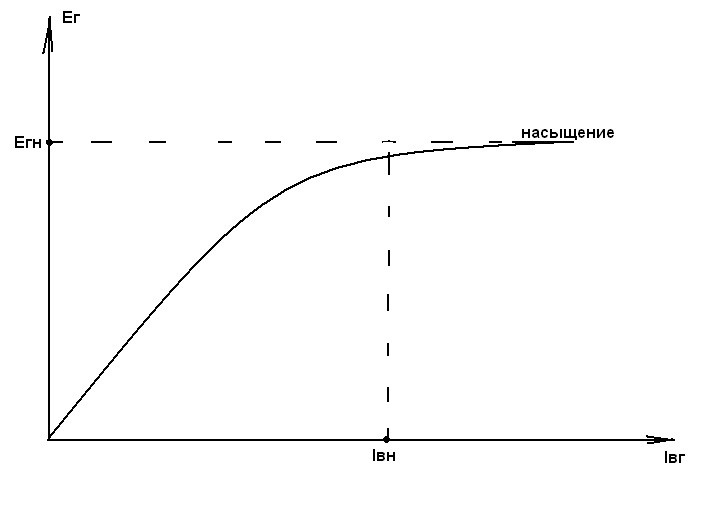 Рассмотрим механические характеристики. От куда следует, что характеристики двигателя будут несколько мягче по отношению к естественной. Семейство механических характеристик приведено на рисунке: 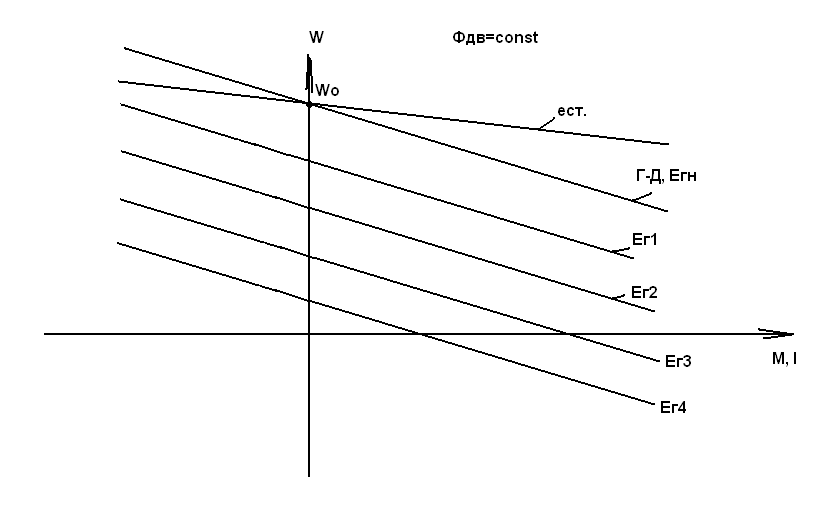 Оценим данный способ регулирования: Регулирование скорости плавное; Диапазон регулирования (20…30):1; Значительные капитальные затраты Рсд>Рг>Рдв. 25.Динамическое торможение электродвигателей постоянного и переменного тока. Расчет механических характеристик.Динамическое торможение происходит за счет того, что двигатель отключается от сети и приводится во вращение механизмом, имеющим запас кинетической энергии. Режим работы двигателя – генераторный. Двигатели постоянного тока. П 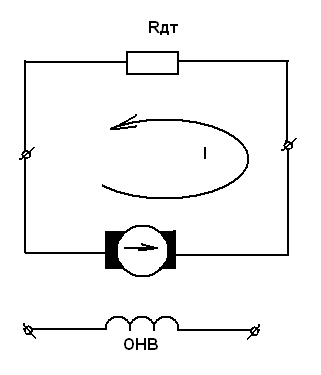 ри динамическом торможении двигатель отключается от сети и подключается к сопротивлению динамического торможения. Т.к. ри динамическом торможении двигатель отключается от сети и подключается к сопротивлению динамического торможения. Т.к. 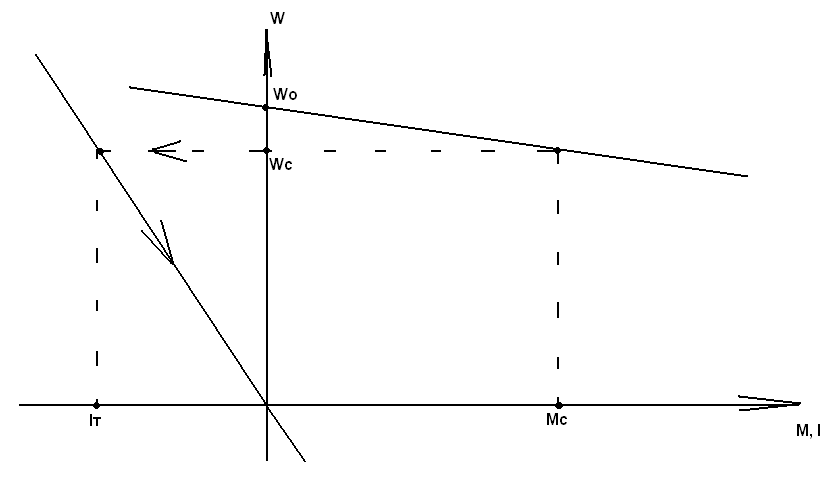 Асинхронный двигатель. В этом режиме двигатель также отключается от сети 2 фазы подключаются к источнику постоянного напряжения U=40…60 В через сопротивление динамического торможения. 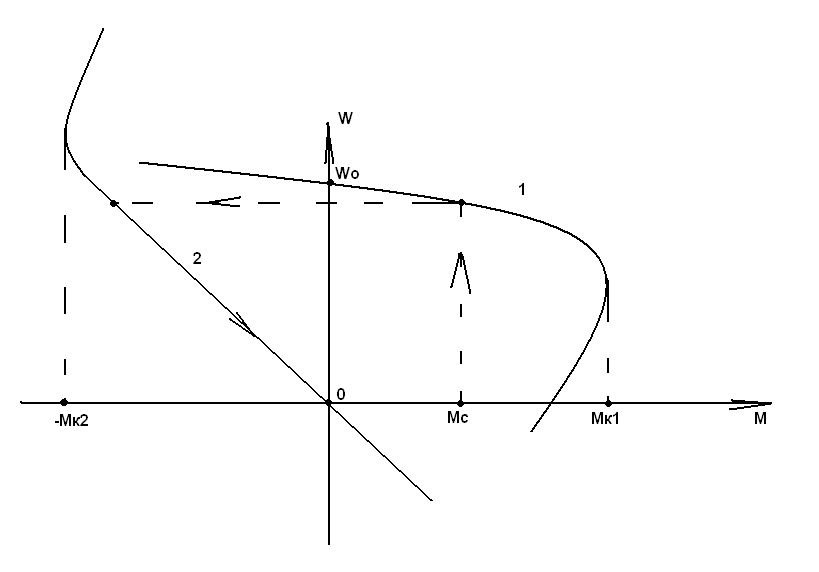 Источник постоянного напряжения создает в статоре неподвижное поле. Этому режиму соответствует характеристика 2. Для ограничения тормозного момента вводится Жесткость характеристики уменьшается за счет введения |