Механика. Механика - МУ и контрольные задания. Методические указания и контрольные задания для студентов заочной формы обучения Астрахань 2022 у дк 531. 8
 Скачать 0.77 Mb. Скачать 0.77 Mb.
|

|
Задача 6 Выходное звено механизма, показанного на рис. 6, совершает возвратно-поступательное (или возвратно-вращательное) движение и нагружено на рабочем ходу постоянной силой Fc (или моментом Тс) полезного сопротивления. На холостом ходу, при обратном направлении движения выходного звена, полезное сопротивление отсутствует, но продолжают действовать вредные сопротивления. Учитывая трение в кинематических парах и зная к.п.д. механизма, определить: движущий момент Tд, постоянный по величине, который нужно приложить к входному звену при установившемся движении с циклом, состоящим из рабочего и холостого ходов; работы сил трения на рабочем и холостом ходах, считая, что вредное сопротивление постоянно на каждом из ходов, но на рабочем ходу оно в три раза больше, чем на холостом; изменение кинетической энергии механизма за время рабочего хода и за время холостого хода; мощность, требуемую от привода при вращении входного звена со средней скоростью ω1 и средние (за целый оборот) мощность полезного сопротивления и мощность сил трения. Решение задачи основано на использовании уравнения движения механизма, устанавливающем связь между изменением кинетической энергии и работами сил (теореме об изменении кинетической энергии). Работа сил и моментов определяется соответственно по линейным или угловым перемещениям звеньев, на которые они действуют, для чего нужно найти положения механизма при крайних положениях выходного звена. Перемещения звеньев, линейные и угловые, можно определить по чертежу, выполненному в масштабе, или рассчитать аналитически. Чтобы определить зоны рабочего и холостого ходов для входного звена, нужно учитывать связь движения с показанным направлением действия полезного сопротивления, которое на рабочем ходу должно препятствовать движению выходного звена. Размеры звеньев, согласно их обозначениям на схеме механизма, и другие необходимые величины приведены в таблицах числовых данных, где η - коэффициент полезного действия, в задачах типа IV т - модуль реечного зацепления, z- число зубьев колеса. В задачах типов I и V применено геометрическое замыкание звеньев в высшей паре, предупреждающее отход звеньев друг от друга; в задачах типа V ролик радиуса rперекатывается в круговом пазу входного звена, охваченный наружным и внутренним профилями паза, в задачах типа I круглый эксцентрик охвачен рамкой выходного звена. Примечание. Сначала необходимо построить механизм в крайних положениях и по заданным направлениям угловой скорости входного звена ω1 и постоянной силы Fc (или момента Тс) полезного сопротивления установить рабочие и холостые ходы. С этого чертежа при графическом определении линейных и угловых перемещений звеньев необходимо снять: для входного звена его углы поворота на рабочем ходу φр и на холостом ходу φх; для выходного звена при его возвратно-поступательном движении линейное перемещение, т. е. ход s, или при его возвратно-вращательном движении угол размаха ψ. Таблица 6.I
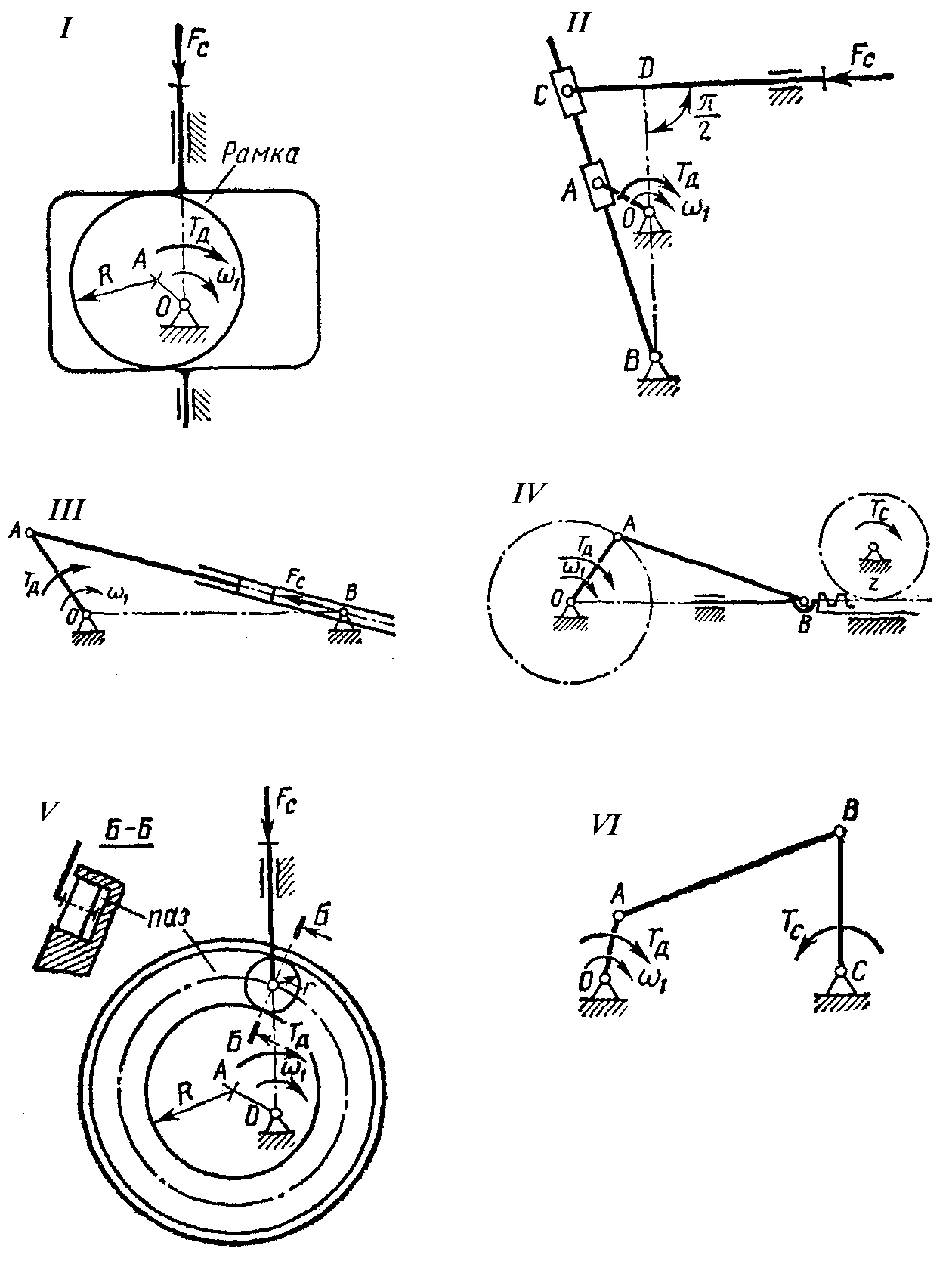 Рис.6 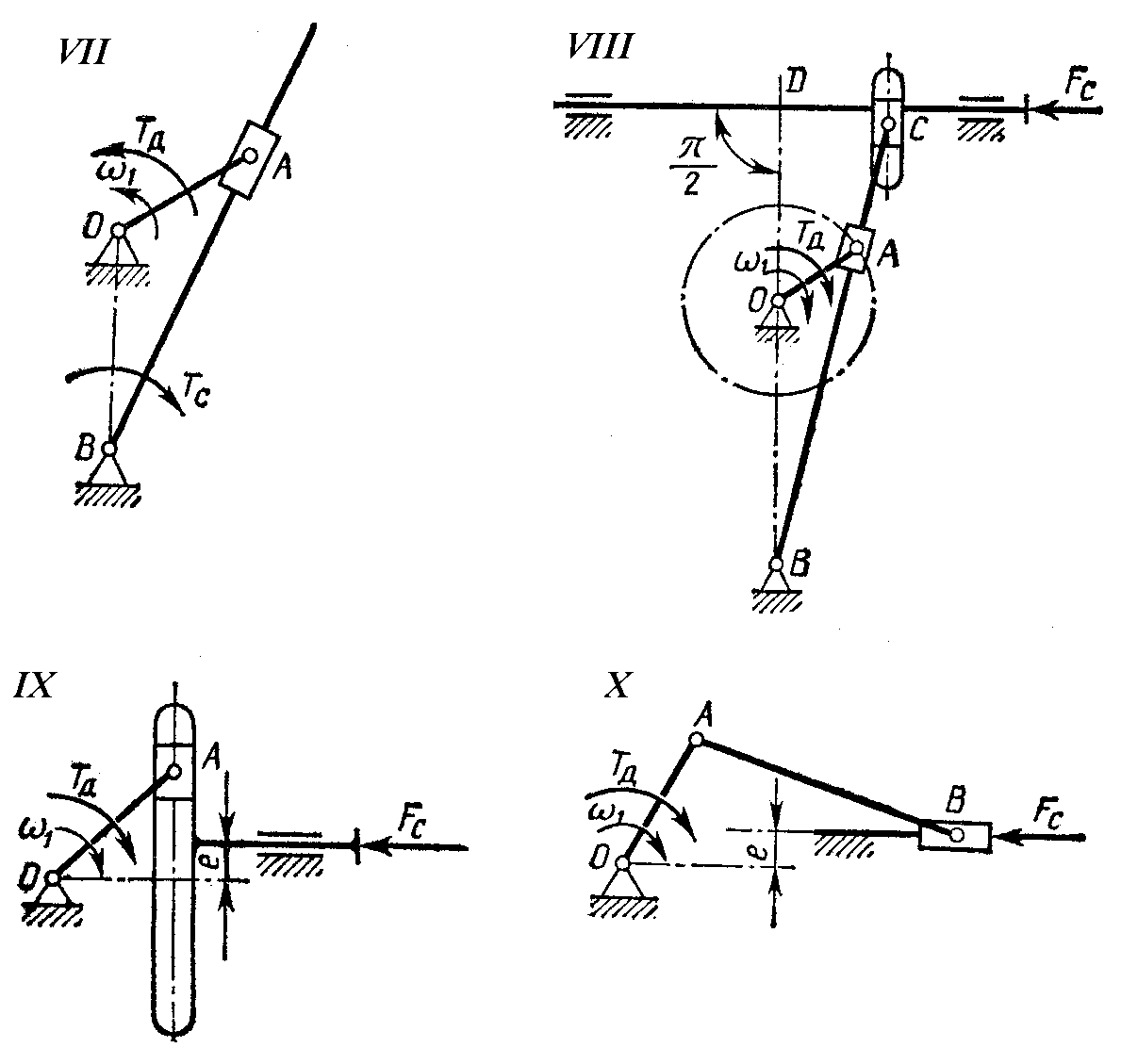 Рис. 6 (продолжение) Таблица 6.II
Таблица 6.III
Таблица 6.IV
Таблица 6.V
Таблица 6.VI
Таблица 6.VII
Таблица 6.VIII
Таблица 6.IХ
Таблица 6.Х
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||