Физика лекции Юнусова (1). Минимальный курс физики. Составлен доц. Юнусовым Н. Б
 Скачать 3.72 Mb. Скачать 3.72 Mb.
|

|
КИНЕМАТИ Минимальный курс физики. Составлен доц. Юнусовым Н.Б. ОГЛАВЛЕНИЕ. Стр. Физика, ч.1. 2 (Физические основы механики. Механические колебания и волны. Молекулярная физика и термодинамика). 1.1. Основы кинематики. 2 1.2. Основы динамики. 4 1.3. Законы сохранения в механике. 6 1.4. Механика твердого тела. 8 1.5. Релятивистская динамика. 11 1.6. Механические колебания. 13 1.7. Механические волны. 16 1.8. Основы молекулярно-кинетической теории. 17 1.9. Функции распределения Максвелла и Больцмана. 20 1.10. Основы термодинамики. 21 Физика, ч.2. 29 (Электростатика. Электродинамика. Электромагнетизм. Электромагнитные колебания и волны). 2.1. Электрическое поле в вакууме. 29 2.2. Электрическое поле в веществе. 33 2.3. Электрический ток. 37 2.4. Магнитное поле в вакууме. 42 2.5. Магнитное поле в веществе. 49 2.6. Основы теории электромагнитного поля. 52 2.7. Электромагнитные колебания. 55 2.8. Электромагнитные волны. 57 Физика, ч.3. 58 (Волновая и квантовая оптика. Основы квантовой механики. Физика атома и твердого тела. Физика ядра и элементарных частиц). 3.1. Интерференция и дифракция света. 58 3.2. Поляризация и дисперсия света. 62 3.3. Тепловое излучение. 66 3.4. Фотоэффект. Эффект Комптона. Давление света. 68 3.5. Основные положения квантовой механики. 69 3.6. Квантовая теория атома. 74 3.7. Элементы физики твердого тела. 80 3.8. Ядро атома. 81 3.9. Элементарные частицы. 85 ФИЗИКА. Часть 1. ОСНОВЫ КИНЕМАТИКИ. Кинематика поступательного движения. Простейшая форма движения материи – механическое движение, т.е. изменение положения материальных тел в пространстве и во времени. Кинематика изучает движение тел без рассмотрения причин, его вызывающих. Простейшей физической моделью тела является материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь. Для описания движения материальной точки необходима система отсчета: часы для отсчета времени и система координат (обычно выбирают прямоугольную декартову систему координат). Положение материальной точки в момент времени tопределяется координатами х, у, z или радиус-вектором 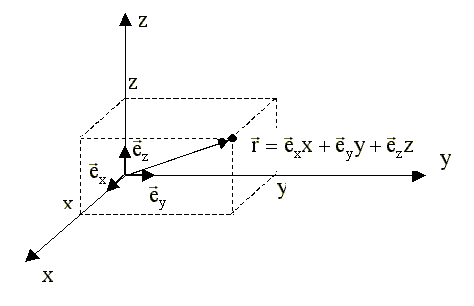 В процессе своего движения точка описывает некоторую линию, называемую траекторией.Расстояние, пройденное материальной точкой по траектории, представляет собой путьs. Вектор В процессе своего движения точка описывает некоторую линию, называемую траекторией.Расстояние, пройденное материальной точкой по траектории, представляет собой путьs. Вектор Мгновенная скорость материальной точки в момент времени tесть первая производная по времени от радиус-вектора движущейся материальной точки: Вектор скорости в каждой точке траектории направлен по касательной к траектории в этой точке. Проекции вектора скорости на координатные оси х, у и z равны Характеристикой изменения скорости является ускорение В каждой точке траектории вектор ускорения можно разложить на две составляющие: одна из них направлена по касательной к траектории в данной точке и называется тангенциальным ускорением Модуль полного ускорения равен Путь, пройденный за промежуток времени от момента t1 до t2,:  , где υ – модуль скорости. , где υ – модуль скорости. Кинематика вращательного движения. Если точка вращается вокруг неподвижной оси , то она описывает окружность с центром на оси вращения, а плоскость этой окружности перпендикулярна оси вращения. Быстроту и направление вращения характеризуют угловой скоростью 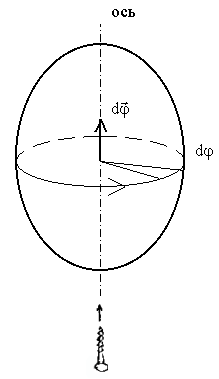 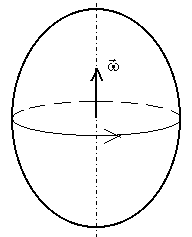 правого винта. Тогда векторы угловой правого винта. Тогда векторы угловой Для характеристики неравномерного движения по окружности используется векторная величина, называемая угловым ускорением Если движение материальной точки ускоренное, то векторы угловой скорости и углового ускорения совпадают по направлению; если движение замедленное, то эти векторы направлены в противоположные стороны. Такие векторы, направление которых совпадает с направлением некоторой оси, называются аксиальными. У них нет определенной точки приложения, они могут изображаться в любом месте на оси вращения. При равнопеременном вращении для величин угловой скорости и углового ускорения выполняются соотношения (аналогичные соотношениям для линейной скорости и линейного ускорения): 1.2. ОСНОВЫ ДИНАМИКИ. Законы динамики. В основе динамики лежат три закона Ньютона. Первый закон Ньютона (закон инерции) касается движения тел, не испытывающих внешних воздействий: всякое тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит его изменить это состояние. Системы отсчета, жестко связанные с такими (свободными) телами, называются инерциальными системами отсчета (ИСО). Для количественного описания воздействия тел друг на друга вводится понятие силы. Сила — векторная величина Сила Второй закон Ньютона утверждает, что быстрота изменения скорости движения тела (ускорение) пропорциональна приложенной силе и происходит по направлению той прямой, по которой эта сила действует: В механике масса – основная характеристика тела, показывающая его способность противостоять ускоряющим силам, т.е. масса характеризует инертность материального тела. Масса тела зависит от его размеров и природы вещества. В механике масса – величина скалярная, положительная, аддитивная и постоянная. В единицах СИ масса измеряется в килограммах (кг), а сила – в ньютонах (Н). Второму закону Ньютона можно придать другую форму, учитывая определение ускорения: Если ввести понятие импульса материальной точки Второй закон Ньютона является уравнением движения материальной точки. Решая его можно определить зависимость координат и скорости материальной точки от времени. При этом, помимо вида функции F(x,y,z,t), должны быть заданы начальные условия: положение и скорость частицы в начальный момент времени. Третий закон Ньютона указывает, что воздействие тел друг на друга носит характер взаимодействия: силы, с которыми действуют друг на друга взаимодействующие тела, равны по величине, противоположны по направлению и никогда не уравновешивают друг друга, так как приложены к разным телам: Центр масс. Закон движения центра масс. В любой совокупности материальных частиц имеется одна точка С, обладающая рядом важных свойств. Эта точка называется центром масс, или центром инерции, а ее положение относительно произвольно выбранного начала отсчета О определяется радиус-вектором Точка, определяемая радиус-вектором Скорость центра масс в данной системе отсчета: где Если на систему материальных точек действуют внешние силы  . Сделав замены . Сделав замены Это выражение называется уравнением движения центра масс: при движении любой системы частиц ее центр масс движется так, как если бы вся масса системы была сосредоточена в этой точке и к ней были бы приложены все внешние силы, действующие на систему. Если сумма внешних сил, действующих на систему, равна нулю, то центр масс движется равномерно и прямолинейно или покоится. В ИСО таким является случай замкнутой системы. Если 1.3. ЗАКОНЫ СОХРАНЕНИЯ В МЕХАНИКЕ. Механическая работа. В механике характеристикой такого действия сил, которое вызывает перемещение тел, является работа. В случае, когда тело движется прямолинейно, а сила З  десь Fr–проекция силы на направление перемещения, величина в круглых скобках – скалярное произведение силы десь Fr–проекция силы на направление перемещения, величина в круглых скобках – скалярное произведение силы В общем случае движения по криволинейной траектории весь путь 12 разбивается на малые участки dℓ, которым соответствуют векторы бесконечно малых перемещений Потенциальное поле сил. Связь между силой и потенциальной энергией. Силы, работа которых не зависит от формы траектории тела, а определяется только его начальным и конечным положениями, называются консервативными или потенциальными. Работа потенциальных сил по любому замкнутому пути равна нулю.Примером консервативных сил являются сила тяготения, сила тяжести и упругая сила. В системе, где действуют только потенциальные силы, всякая работа этих сил связана с изменением конфигурации тел системы. Если силы, действующие в системе, совершают положительную работу, то конфигурация при этом всегда изменяется так, что в конце концов способность системы совершать работу оказывается исчерпанной. Значит, всякая система тел, в которой действуют потенциальные силы, обладает определенным ограниченным запасом работы, которую эти силы могут совершить. Этот запас работы, обусловленный конфигурацией тел системы, представляет собой потенциальную энергию системы. Например, потенциальная энергия ЕПОТрастянутой на величину х пружины есть вся работа, которую может совершить упругая сила F = –k·x при сокращении пружины до нормальной длины: В этом случае потенциальная энергия представляет собой энергию упругой деформации. Если тело падает вниз, то сила тяжести может совершить некоторую определенную работу, величина которой зависит от начальной высоты тела. Значит тело, поднятое на некоторую высоту h, обладает потенциальной энергией: ЕПОТ=mgh, где h– начальная высота тела над уровнем, от которого отсчитывается потенциальная энергия тела. Потенциальная энергия всегда связана с той или иной силой взаимодействия тел, поэтому и аналитический вид потенциальной энергии зависит от рассматриваемых сил. Физический смысл имеет не само значение потенциальной энергии, а ее изменение ΔЕПОТ. Это изменение ΔЕПОТ= ЕПОТ2 – ЕПОТ1, определено так, что оно равно работе со знаком минус, совершаемой потенциальной силой при переходе тела из точки 1 в точку 2: В дифференциальной форме последнее выражение принимает вид: Величина gradЕПОТ или декартовой системе координат имеет вид: где Так как производная обращается в нуль в точках, где функция достигает максимума или минимума, то сила ЕПОТ {x,y,z) равна нулю. Это положения неустойчивого и устойчивого равновесия. Работа силы  . . В общем случае, энергия – наиболее общая и универсальная характеристика движения материи и процессов, связанных с превращением различных форм движения друг в друга. Законы сохранения в механике. Любое тело или совокупность тел можно рассматривать как систему материальных точек. Состояние системы характеризуется заданием координат и импульсов всех ее частей. Зная законы действующих в системе сил и состояние системы в начальный момент, можно с помощью дифференциальных уравнений динамики определить состояние системы в любой момент времени. Но часто ввиду сложности систем и процессов, происходящих в них, невозможно до конца провести подобное решение. В системе взаимодействующих тел координаты, скорости и ускорения тел постоянно меняются. Однако, существуют три физические величины, которые в замкнутой системе (системе не взаимодействующей с внешними телами) остаются неизменными (сохраняются). Такими величинами являются импульс, энергия и момент импульса (об этой величине ниже). Особенно важная роль этих величин связана с тем, что они являются аддитивными: их значения для системы, состоящей из частей, равно сумме значений для каждой из частей в отдельности. |