Физика лекции Юнусова (1). Минимальный курс физики. Составлен доц. Юнусовым Н. Б
 Скачать 3.72 Mb. Скачать 3.72 Mb.
|

|
Закон сохранения механической энергии: в инерциальной системе отсчета полная механическая энергия замкнутой системы частиц, в которой действуют только консервативные силы, сохраняется: E = ЕКИН+ ЕПОТ= const. Сохраняется именно полная механическая энергия, в то время как кинетическая и потенциальная энергии по отдельности могут меняться. В основе закона сохранения механической энергии лежит свойство однородности времени, которое проявляется в том, что физические свойства и законы движения замкнутой системы не зависят от выбора начала отсчета времени. Например, потенциальная энергия поднятого на некоторую высоту тела не меняется с течением времени. Если бы это было не так, то можно было бы поднять тело, дождаться момента, когда его энергия увеличится, и заставить тело совершить работу. Мы получили бы вечный двигатель, работающий за счет разности энергий: возросшей с течением времени и затраченной на подъем тела. Закон сохранения импульса: в инерциальной системе отсчета импульс замкнутой системы частиц остается постоянным как по величине, так и по направлению,т.е. Действительно, из уравнения движения При этом импульсы отдельных частей системы могут меняться. У незамкнутой системы может сохраняться не сам импульс, а его проекция на то направление, по которому сумма проекций действующих сил равна нулю. В основе закона сохранения импульса лежит свойство однородности пространства, которое проявляется в том, что физические свойства и законы движения замкнутой системы не зависят от выбора положения начала координат. Если бы пространство было неоднородным, т.е. точки пространства были бы неэквивалентны, то при движении свободного тела эта неэквивалентность проявилась бы в изменении импульса (появлении ускорения). С помощью законов сохранения можно, не решая уравнений динамики, сделать во многих случаях ряд заключений о свойствах процессов, не вникая в их детальное рассмотрение. Законы сохранения представляют собой общие фундаментальные принципы и отражают свойства пространства и времени. 1.4. МЕХАНИКА ТВЕРДОГО ТЕЛА. Кинетическая энергия вращения. Момент инерции материальной точки и тела относительно неподвижной оси. Пусть материальная точка массой m движется вокруг некоторой оси по окружности радиуса r со скоростью υ. Тогда кинетическую энергию точки с учетом связи линейной и угловой скоростей υ=ω·r можно записать так: Моментом инерции тела относительно оси называется сумма моментов инерции элементов (материальных точек), из которых состоит тело: Момент инерции сплошного тела определяют интегрированием по всему объему (по всем материальным точкам): Если тело имеет плотность ρ, то последнее равенство можно представить в виде: Момент инерции сплошного цилиндра массой ти радиуса основания R относительно оси, проходящей через центр масс цилиндра параллельно его образующей, рассчитанный по этой формуле, равен: Для сплошного шара массой ти радиуса Rмомент инерции относительно оси, проходящей через центр масс шара, равен: Момент инерции для стержня длиной ℓ и массой т относительно оси, проходящей через центр масс стержня перпендикулярно ему, : Момент инерции J тела характеризует, с одной стороны, инертные свойства тела при вращательном движении, а с другой стороны, распределение вещества в пространстве относительно оси. Момент инерции, так же как и масса тела, является аддитивной величиной. Если известен момент инерции Joтела относительно оси, проходящей через центр масс тела, то можно найти его момент инерции относительно любой другой параллельной ей оси: J = J0 + m·d2, где d – расстояние между осями. Последнее равенство выражает теорему Штейнера: момент инерции относительно любой оси вращения равен моменту инерции относительно параллельной оси, проходящей через центр масс, сложенному с произведением массы тела на квадрат расстояния центра масс тела от оси вращения. Из теоремы Штейнера очевидно, что всегда J>J0, т.е. минимальное значение момента инерции достигается для оси, проходящей через центр масс. Единицей момента инерции в системе СИ служит 1 кг·м2. Если тело катится, то кинетическая энергия такого тела определяется поступательным движением тела как целого и вращением относительно движущейся оси: Момент импульса. Момент силы. Основной характеристикой вращательного движения точки является момент импульса. Моментом импульса (или угловым моментом) материальной частицы относительно точкиО называется векторная величина Рассмотрим частицу, вращающуюся вокруг некоторой оси под действием силы Вектор Единицей момента импульса в СИ является 1кг·м2/с, а момента силы 1 Н·м. Динамика твердого тела Пусть на материальную точку действует сила Так как Это уравнение легко обобщить на твердое тело, если под Формально все соотношения, описывающие динамику вращательного движения, можно получить из соответствующих соотношений динамики поступательного движения материальной точки, если в последних заменить массу тела на момент инерции, силу – на момент силы, импульс точки – на момент импульса тела, а линейные скорость и ускорение – на угловые скорость и ускорение. Из основного уравнения динамики для вращательного движения В основе закона сохранения момента импульса лежит свойство изотропности (равноправности всех направлений) пространства, которое проявляется в том, что физические свойства и законы движения замкнутой системы не зависят от выбора направлений осей координат инерциальных систем отсчета.. 1.5. РЕЛЯТИВИСТСКАЯ ДИНАМИКА. В конце 19 века было показано, что классическая механика не применима к описанию движения тел с очень большими, близкими к скорости света, скоростями. Это позволяет делать теория, созданная А.Эйнштейном. Специальная теория относительности (СТО) или по другому релятивистская динамика опирается на два постулата: Первый постулат (принцип относительности): все законы физики имеют одинаковую форму во всех инерциальных системах отсчета (ИСО). В 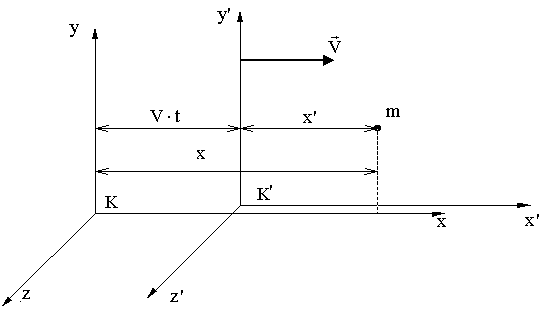 торой постулат (постоянство скорости света): свет распространяется в пустом пространстве со скоростью с = 3·108 м/с, не зависящей от скорости движения источника или наблюдателя. торой постулат (постоянство скорости света): свет распространяется в пустом пространстве со скоростью с = 3·108 м/с, не зависящей от скорости движения источника или наблюдателя.Пусть система отсчета Kявляется неподвижной, а система K’ движется относительно нее вдоль оси x со скоростью υ. Уравнения преобразования координат и времени для т. m при переходе от одной ИСО к другой, полученные Лоренцем, имеют вид: Следствия из преобразований Лоренца. 1. Сокращение длины. Пусть вдоль оси x’ в движущейся системе отсчетаK’ лежит стержень длины ℓo (это собственная длина или длина предмета (стержня) в той системе отсчета, в которой он покоится). Тогда ℓ – длина стержня относительно неподвижной системы отсчета K– равна : Таким образом, движущийся предмет кажется наблюдателю более коротким, чем покоящийся. Сокращение происходит только в направлении относительного движения и становится заметным лишь при υ, близкой к скорости света в вакууме с. 2. Замедление времени. где Δt0 – собственное время, т.е. промежуток времени в системе, где часы покоятся, Δt соответствует промежутку времени в системе, относительно которой часы движутся, причем Δt > Δt0. Таким образом, движущиеся часы идут медленнее покоящихся. 3. Относительность одновременности. События, одновременные в одной ИСО, оказываются неодновременными по отношению к другой ИСО. 4. Релятивистские формулы преобразования скоростей (закон сложения скоростей) получаются дифференцированием по времени преобразований Лоренца: Здесь их , иу , uz , u’x, u’yи и'г— проекции скорости движущейся частицы на оси неподвижной и подвижной систем отсчета, соответственно. Отсюда следует, что скорость света, равная u’x = с относительно системы отсчета K’, и относительно Kбудет равнаих = с. Физические величины, которые не меняются при переходе от одной инерциальной системы к другой, называются инвариантами теории относительности. К инвариантам, например, относятся скорость света в вакууме, масса и электрический заряд частицы, пространственно-временной интервал А. Эйнштейн показал, что закон природы – основное уравнение динамики Из этой формулы видно, что тело, обладающее массой, не может двигаться со скоростью, большей или равной скорости света с . Из этой же формулы следует, что со скоростью света может двигаться, обладая конечным импульсом, только безмассовая частица (m=0). Это, например, фотон. Основное уравнение динамики в СТО принимает, т.о., вид: Если сила Если истолковывать Согласно СТО, пространство и время являются относительными, зависят друг от друга, образуя единый 4-х мерный пространственно-временной континуум. Несколько позже в общей теории относительности А. Эйнштейн показал, что на пространство и время влияет тяготение, а именно, вблизи очень массивных тел пространство искривляется, а время замедляется. 1.6. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ Д  вижение, которое повторяется через равные промежутки времени, называется колебательным. Промежуток времени T, по истечение которого движение повторяется, называется периодом колебания. В моменты времени tи t + Т частица имеет одно и то же положение и одну и ту же скорость. Величина ν, обратная периоду, называется частотой: ν = 1/Т. Она определяет, сколько раз в секунду повторяется движение, и измеряется в герцах(Гц). Круговой (циклической) частотой называется величина ω = 2πv. вижение, которое повторяется через равные промежутки времени, называется колебательным. Промежуток времени T, по истечение которого движение повторяется, называется периодом колебания. В моменты времени tи t + Т частица имеет одно и то же положение и одну и ту же скорость. Величина ν, обратная периоду, называется частотой: ν = 1/Т. Она определяет, сколько раз в секунду повторяется движение, и измеряется в герцах(Гц). Круговой (циклической) частотой называется величина ω = 2πv.Свободные (собственные) колебания – колебания, происходящие без внешних воздействий за счет первоначально полученной телом энергии. Рассмотрим горизонтальный пружинный маятник жесткостью k и массой m, помещенный в среду с коэффициентом сопротивления r, на который вдоль оси х действует переменная внешняя сила F(t), изменяющаяся со временем, например, по гармоническому закону F(t) = F0 ·cosΩt с некоторой частотой Ω . Уравнение движения маятника: где введены обозначения Проанализируем уравнение (2). |