Электротехника теория. Однофазные электрические цепи
 Скачать 1.6 Mb. Скачать 1.6 Mb.
|

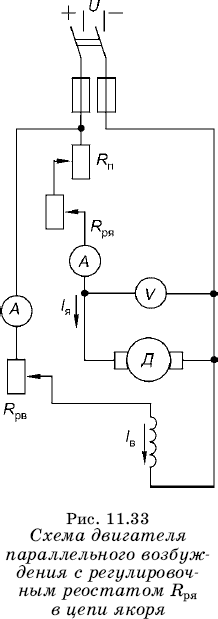
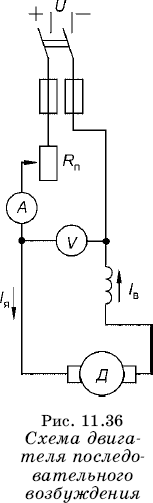
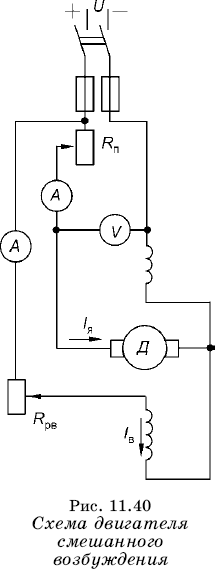
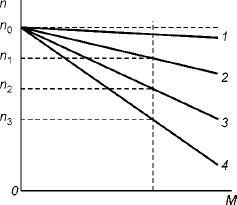
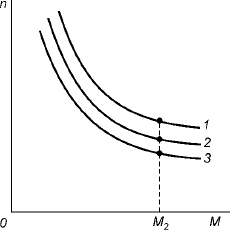
Iя=(15…20) IяномПри таком токе ОЯ может сгореть. Пусковой ток нужно уменьшить. Для этого последовательно с обмоткой якоря включают пусковой реостат. Сопротивление пускового реостата подбирают таким, чтобы ток якоря пусковой Iяп=(1,5…2) Iяном Для создания большого пускового момента и быстрого разгона двигателя, сопротивление Rрв делают минимальным, чтобы ток возбуждения и магнитный поток были максимальными. Время разгона двигателя сокращается. Увеличивается пусковой момент, способствующий пуску двигателя под нагрузкой 30.Частота вращения двигателя и ее регулирование. U=RяIя +Ея U=RяIя + СеnФ n=(U-RяIя) / СеФВ общем случае последовательно с обмоткой якоря может быть включен регулировочный реостат по схеме пускового, тогда: n=(U-(Rя+ Rря) Iя) / СеФОтсюда следует три способа регулирования частоты вращения: U=var при Ф=const Rря=0 Ф =var при U =const Rря=0 Rря =var при U =const Ф = const   Под регулированием частоты вращения понимают принудительное изменение частоты вращения оператором при постоянстве тормозного момента (Мт= const) Под регулированием частоты вращения понимают принудительное изменение частоты вращения оператором при постоянстве тормозного момента (Мт= const)С увеличением напряжения частота вращения увеличивается При уменьшении тока возбуждения(изменение магнитного потока) частота вращения двигателя увеличивается С увеличением сопротивления частота вращения уменьшается ВЫВОДЫ: Самым экономичным способом регулирования частоты является изменение магнитного потока.Для изменения напряжения требуется автономный источник питания. При изменении сопротивления имеют место большие потери энергии. 31,32,33.Двигатели параллелого, последовательно и смешанного возбуждения и их характеристики.
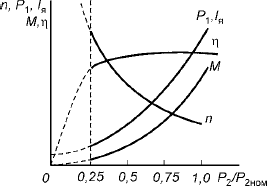
34.Потери КПД МПТ В процессе преобразования энергии в МПТ часть энергии преобразуется в теплоту и рассеивается в машине. Виды потерь: Электрические потери – это потери на нагрев проводов ОЯ, добавочных полюсов, возбуждения. В каждой обмотке и в регулировочных реостатах Rрв и Rря электрические потери пропорциональны квадрату тока: Pп.пр=I2R . Электрические потери в щеточном контакте пропорциональны току якоря и падению напряжения под щеткой, т.е : Pп.щ=IяΔUщ Потери в стали магнитопровода от гистерезиса и вихревых токов Pп.с. Эти потери пропорциональны квадрату магнитной индукции и частоте вращения якоря. Механические потери Рп.мх – это потери, вызванные трением в подшипниках, щеток о коллектор и вращающегося якоря о воздух. Механические потери пропорциональны частоте вращения. 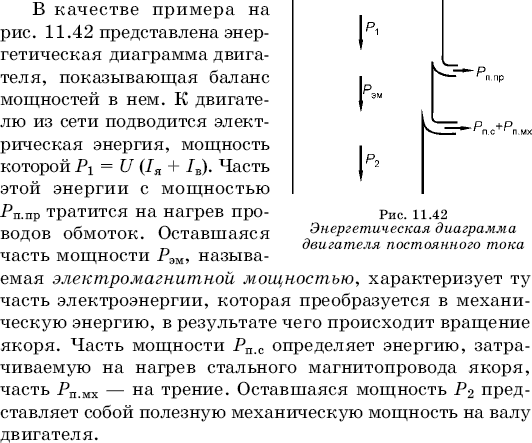 КПД двигателя и генератора η=P2/P1 , где Р2- механическая мощность на валу двигателя или электрическая мощность генератора, отдаваемая приемнику, Р1 – мощность электрической энергии, подводимой к двигателю из сети, или механическая мощность приводного двигателя, вращающего якорь генератора. Номинальное значение КПД двигателей малой мощности составляет 0,78...0,85, а двигателей средней и большой мощности – 0,85-0,94 35. Реакция якоря  Реакцией якоря называется воздействие магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов машины. В режиме холостого хода ток якоря равен нулю и магнитное поле машины образуется только главными полюсами (рис (а)). Оно симметрично относительно оси главных полюсов и относительногеометрической нейтрали. Если отключить обмотку возбуждения и подключить якорь к источнику питания, то протекающий в обмотке якоря ток создаст магнитное поле, показанное на рисунке (б). Магнитная ось полюсов этого поля совпадает с осью щеток и перпендикулярна оси поля главных полюсов. Вращение якоря не влияет на картину поля якоря, т.к. распределение тока в обмотке якоря остается постоянным. В рабочем режиме машины включены обе обмотки и магнитное поле образуется суммированием обоих полей. В результате ось магнитного поля поворачивается на некоторый угол В результате смещения часть проводников параллельной ветви, расположенных между щеткой и нейтралью окажется под полюсом противоположной полярности и будет создавать тормозной момент. Изменение нагрузки машины будет приводить к изменению тока якоря и соответствующему усилению или ослаблению его магнитного поля. Поэтому угол Помимо смещения нейтрали реакция якоря уменьшает общий магнитный поток за счет того, что поле под главными полюсами искажается. Под одним краем полюса оно ослабляется, а под другим усиливается, но усиление поля в результате насыщения края полюса оказывается меньше ослабления и результирующий магнитный поток уменьшается, что отрицательно сказывается на энергетических показателях машины. Смещение физической нейтрали оказывает также негативное влияние на процесс коммутации. |