Электротехника теория. Однофазные электрические цепи
 Скачать 1.6 Mb. Скачать 1.6 Mb.
|

= w1/w2I1+I2 = I0 I1= I0- I2 – уравнение токов АД В отличие от трансформатора ток I0 у АД составляет I0=(0,5...0,6) I1ном Это объясняется тем, что вращающийся магнитный поток дважды пересекает воздушный зазор промежуток с большим магнитным сопротивлением. Для создания остаточного магнитного потока требуется большие МДС. 56.Вращающий момент АД Как у двигателя постоянного тока сила F создается при наличии тока в обметке якоря и вращающегося магнитного поля. Поэтому по аналогии с двигателем постоянного тока можно утверждать, что вращающий момент АД пропорционален магнитному потоку и активной составляющей тока якоря. У ДПТ: М=СмIяФ У AД: М=СмI2aФm I2a=I΄2cosψ2 M=C΄mU12(R΄2/s)/[(R1+R2΄/s)2+(X1+X2΄)2](*) C΄m=Cm/4.44kоб1w1f Выводы: из формулы (*) видно, что вращающий момент пропорционален квадрату напряжения сети. Это означает что АД очень чувствителен к снижению напряжения. Если U1 уменьшается на 10%, то, М уменьшается на 19%. Вращающий момент зависит от скольжения s 57.Механическая характеристика, рабочие характеристики АД 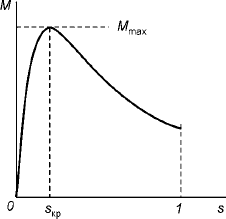 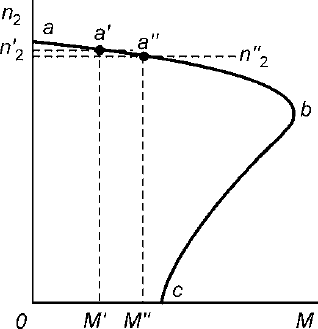 s=(n1-n2)/n1 n2=(1-s)n1 Если s=0, то n1=n2 s=(n1-n2)/n1 n2=(1-s)n1 Если s=0, то n1=n2Если s=1, то n2=0 n2=f(s )- прямая линия Совместив начала осей n2 и М и повернув оси на 90* по ч.с получим механическую характеристику Механическая характеристика n2=f(M) при U,f=const На характеристике можно отметить 3 характера момента Mm-максимальный момент М ном – номинальный момент Мп- пусковой момент Mm/Мном=γ – передаточный коэффициент. Для АД от 1,7 до 2,5 На характеристке можно отличить две области: [a-b] – область устойчивой работы двигателя. Работая на этом участке характеристики, двигатель способен самостоятельно изменить свой вращающий момент так, как изменился тормозной момент, чтобы М=Мт [b-c] – участок неустойчивой работы двигателя. Максимальный момент называется опрокидывающим моментом. Если Мт>Мm, то двигатель останавливается. 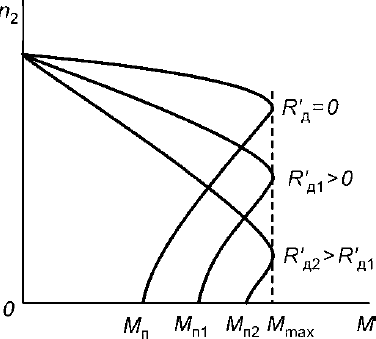 Двигатель с фазным ротором имеет семейство механических характеристик. Двигатель с фазным ротором имеет семейство механических характеристик.Если R΄д = 0, то характеристику называют естественной Мm не зависит от активного сопротивления в цепи ротора 58.Рабочие характеристики АД Зависимость n2,s, M2, I1, cos φ,η=f(P2) при U1=const, f=const 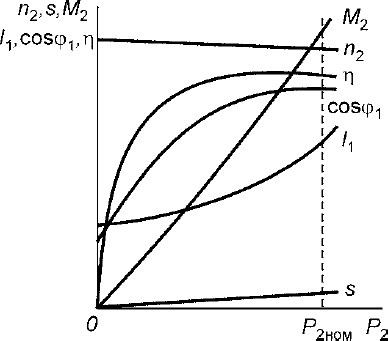 n2=f(P2). Рабочий участок механической характеритики показывает, что при изменении тормозного момента, частота вращения изменяется незначительно. 2) s=f(P2) s=(n1-n2)/n1=1- n2/n1 n2=f(P2). Рабочий участок механической характеритики показывает, что при изменении тормозного момента, частота вращения изменяется незначительно. 2) s=f(P2) s=(n1-n2)/n1=1- n2/n1т.к n2 изменяется незначительно, то и скольжение тоже. n2↓ s↑ sном=0,03-0,06 3)M2=f(P2) M2=P2/Ω2=60P2/2πn2 Т.к. при P2↑ n2↓ то M2=f(P2)- отличается от линейной и с P2↑,M2↑ несколько быстрее, чем линейно. 4) I1=f(P2) I0-ток хх, I0=(0.5..0.6)I1ном P2↑ I΄2↑ I1↑ постепенно cosφ=f(P2), при хх I0=I1 это почти индуктивный ток. Он предназначен для создания вращающегося магнитного поля, cosφ 0=0,15-0,2 При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (07 - 0,80) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. η=f(P2) - типичная для электрических машин Недостатки АД Большой ток хх 2)Низкий cosφ 59.Пуск АД При пуске n2=0, s=1, R2΄/s= R2΄ - минимальный.  Пусковой ток ротора: Пусковой ток ротора:т.к. R2’< 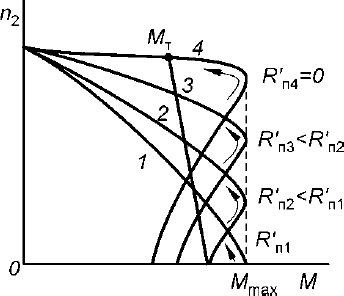 Применяют ряд мер для уменьшения пусковых токов: 1)Пуск с однофазным ротором. Применяют ряд мер для уменьшения пусковых токов: 1)Пуск с однофазным ротором.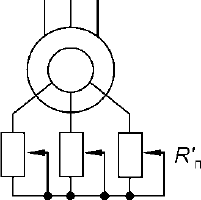 Rп- пусковой реостат. Пусковой реостат вкл Rп- пусковой реостат. Пусковой реостат вклпоследовательно с обмоткой ротора. Тогда уменьшается.Чтобы получить Mпmax нужно подобрать такое Rп3, чтобы sкр=1 sкр=(R2’+R’п)/Хк=1=> R’п = Хк - R2’ Пуск путем переключения обмотки статора со звезды на треугольник. Применяются для двигателей с короткозамкнутым ротором. 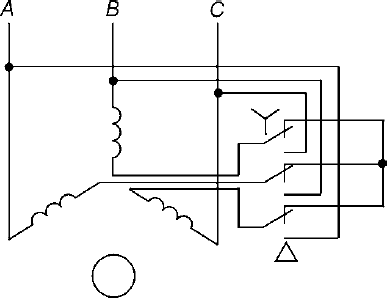 Рассмотрим : Рассмотрим :звезда: Iл=Iф=Uф/Zдв=U1л/√3 Zдв треугольник: : Iл=√3Iф=√3Uф/Zдв=/√3 U1лZдв Соотношения линейных токов остается постоянным, как в рабочем режиме, так и в пусковом. IлпY/ IлпYΔ=3 Осуществляя пуск двигателя при соединении обмоток статора звездой, пусковой ток уменьшаем в 3 раза. После пуска обмотки статора переключаем на треугольник. Такой способ пуска допустим, если Uфдв=Uл сети. Способ допустим при пуске двигателя на хх, т.к. пусковой момент тока уменьшается в 3 раза Пуск путем непосредственного включения. Никаких способов уменьшения пускового тока не осуществляется. Применяют при пуске на холостом ходу двигателей малой мощности(длится 5 сек) Пуск при пониженном напряжении. Для понижения напряжения применяют АТ, активный и индуктивные элементы, включенные последовательно с обмоткой статора на время пуска. 60. Регулирование частоты и направления вращения АДРегулирование частоты вращения асинхронного двигателя определяется формулой: Способы регулирования частоты вращения асинхронного двигателя 1. Изменение частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока еще очень дороги, поэтому они мало применяются. 2. Изменение числа пар полюсов p на статоре. Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р = 1, 2, 3, 4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится специальным переключателем. Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (например, для привода продольно-строгального станка при рабочем и обратном ходе). 3. Третий способ регулирования частоты вращения возможен лишь для асинхронных двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах. К категории регулирования вращения вала двигателя относится так называемое реверсирование асинхронного двигателя, то есть изменение направления вращения на обратное. |