Конспект лекций по станкам новый. Отовки и выполнения практических работ студент должен обладать следующими компетенциями
 Скачать 29.77 Mb. Скачать 29.77 Mb.
|

|
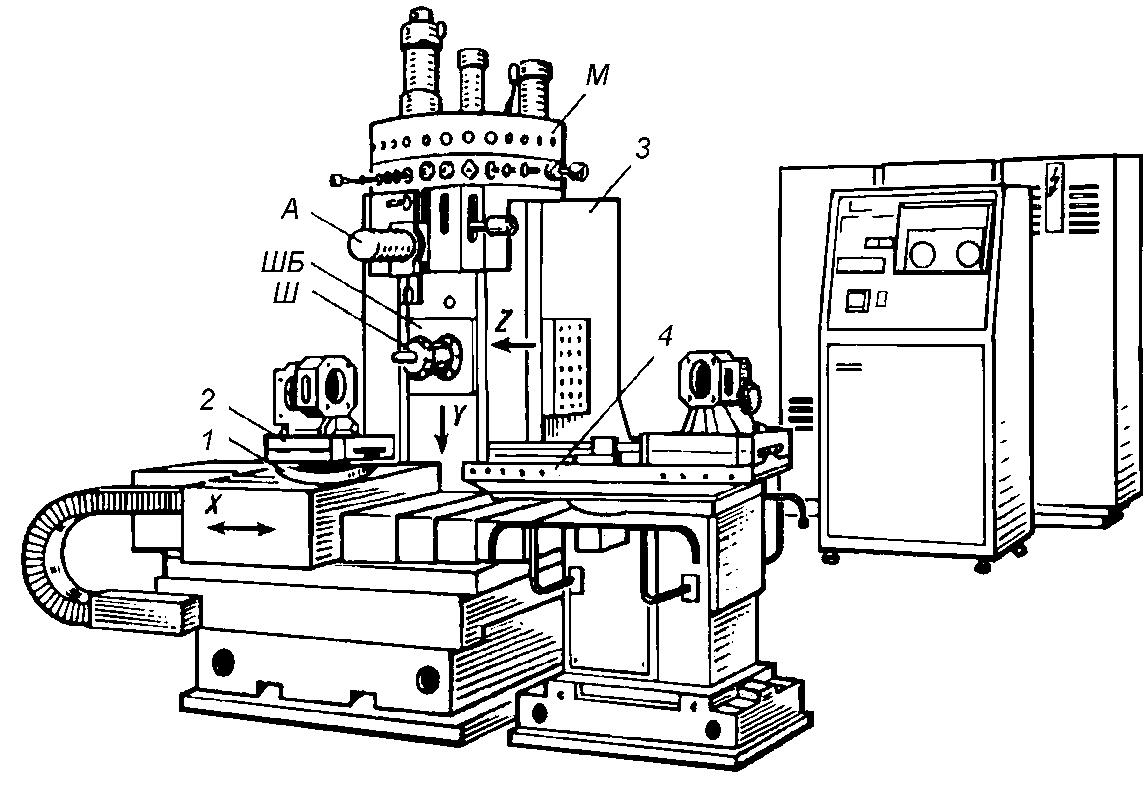
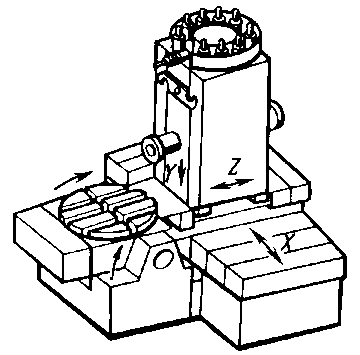
6.3. Многооперационные станки для обработки корпусных и плоских деталей Многооперационные станки предназначены для обработки корпусных и плоских деталей, которые можно обрабатывать с одной установки с нескольких сторон (до пяти). Типовыми технологическими операциями являются: растачивание, сверление, зенкерование, развертывание, цекование, нарезание резьбы метчиками, фрезерование плоскостей, контуров и фасонных поверхностей. МС снабжают необходимым режущим инструментом, расположенным в специальном инструментальном магазине. В соответствии с заданной управляющей программой используется любой инструмент из магазина, требуемый для обработки соответствующей поверхности. Все более широкое применение находят также устройства автоматической смены заготовок, предварительно закрепленных на столах-спутниках. МС для обработки корпусных и плоских деталей по компоновке выполняют горизонтальными, вертикальными и продольно-обрабатывающими. При горизонтальной компоновке (рис. 58) ось вращения шпинделя Ш расположена горизонтально, и такие станки чаще всего используют для обработки сложных корпусных деталей. Шпиндельная бабка ШБ перемещается (координата Y) по вертикальным направляющим стойки 3, которая может быть подвижной (координата Z) или неподвижной. Отдельные станки имеют выдвижной шпиндель. На продольном столе (координата X) расположен поворотный стол 1. На верхнем торце стойки смонтирован инструментальный магазин М. В устройство автоматической смены инструмента входит автооператор А. Поворотная платформа 4 служит для установки на столе-спутнике очередной заготовки во время обработки предыдущей детали той же или совершенно иной конфигурации. На МС вертикальной компоновки ось вращения шпинделя Ш расположена вертикально. Станки удобны при обработке многих плоских деталей сложной формы (штампов, пресс-форм, рычагов, крышек, фланцев и т.д.). Шпиндельная бабка ШБ перемещается (координата Z) по вертикальным направляющим стойки. Шпиндель обычно выдвижной. Продольный и поперечный суппорты обеспечивают перемещение детали по координатам X и Y. Типоразмерные ряды МС строятся по ширине стола (100…5000 мм) с коэффициентом геометрической прогрессии 1,26. Величины перемещения рабочих органов назначают по наибольшему размеру заготовок, устанавливаемых на стол, с учетом возможности выхода режущего инструмента за пределы обрабатываемых поверхностей. В условиях мелкосерийного и серийного производства доля машинного времени в общем времени работы МС достигает 70…90 % (для сравнения: доля машинного времени на универсальных станках составляет 20…30 %), а производительность изготовления деталей превышает производительность обработки на универсальных станках до 10 раз.
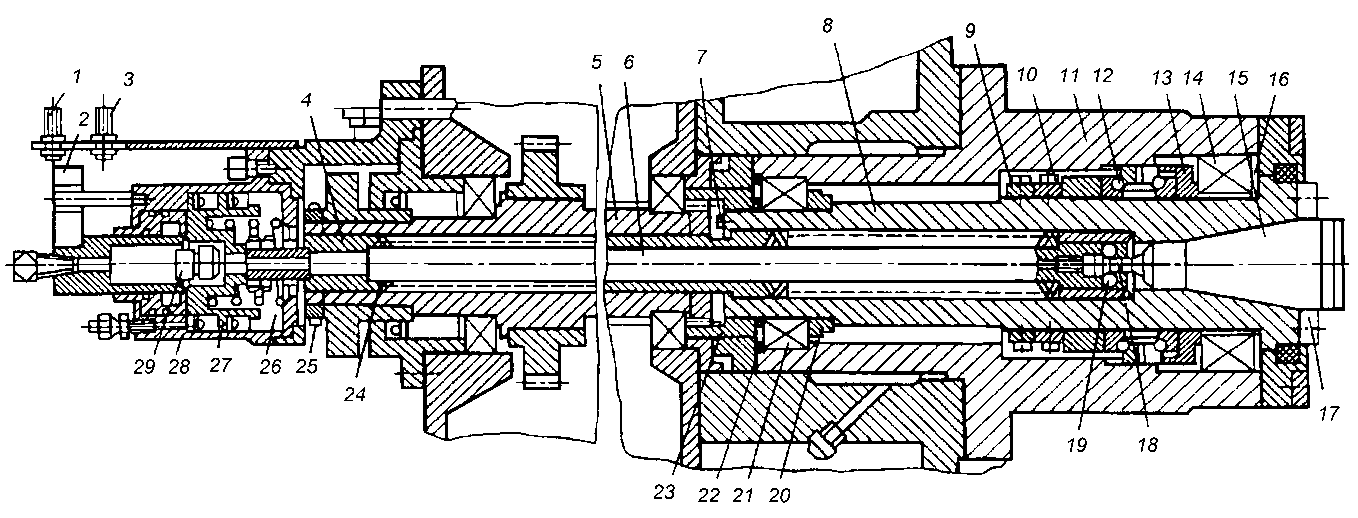
Современные МС имеют в приводах главного движения чаще всего достаточно мощные электродвигатели постоянного тока с двухзонным регулированием частоты вращения, что обеспечивает работу каждого инструмента в оптимальных режимах. Диапазон регулирования частоты вращения таких электродвигателей от номинальной при постоянной мощности достигает 8:1, а при постоянном крутящем моменте до 1:1000. Механическая часть приводов значительно упрощена и представляет собой двух- и трехступенчатую коробку скоростей, благодаря чему достигаются высокие динамические качества приводов. Приводы подач. Обеспечивают широкий диапазон регулирования рабочих подач (до 10000 раз и более) при постоянном крутящем моменте, высокую скорость вспомогательных перемещений (до 20 м/мин), достаточные тяговые усилия, стабильность и надежность работы. Выполнение этих требований обусловливает широкие возможности МС, их высокую точность и производительность. Наибольшее распространение имеют приводы подач с регулируемыми высокомоментными электродвигателями постоянного тока, которые передают движение рабочему органу через винтовую пару качения. Шпиндельные узлы. Являются многофункциональными механизмами, которые служат для установки режущего инструмента, сообщения ему вращения и автоматической замены. При этом требования к основным характеристикам шпиндельных узлов (точности, жесткости, диапазону регулирования частот вращения, быстроходности, надежности и долговечности) постоянно повышаются. Наиболее распространены в МС невыдвижные шпиндели на подшипниках качения (рис. 59). Опоры шпинделя монтируются либо в корпусе шпиндельной бабки, либо в вынесенной вперед гильзе 11 с фланцем для ее крепления в корпусе бабки. Такая конструкция шпинделя позволяет создать на единой конструк-тивной базе различные модификации шпиндельных узлов по размеру и конфигурации поверхностей для закрепления инструмента, диапазону регулирования частот вращения, положению оси вращения шпинделя, а также облегчает монтаж, регулировку и ремонт шпиндельных узлов. На рис. 59 шпиндель 8 установлен в гильзе 11 на двухрядных роликовых подшипниках 14 и 21, воспринимающих радиальную нагрузку. Осевую нагрузку воспринимает шариковый упорно-радиальный подшипник 12. Натяг в переднем радиальном подшипнике регулируется изменением толщины кольца 16 и перемещением через промежуточное кольцо 13 внутреннего кольца подшипника (с конической шейкой) гайками 9 и 10. Натяг в аналогичном заднем подшипнике изменяется за счет толщины кольца 20 при затягивании болтов 7, в результате чего через втулку 22 смещается внутреннее кольцо подшипника.
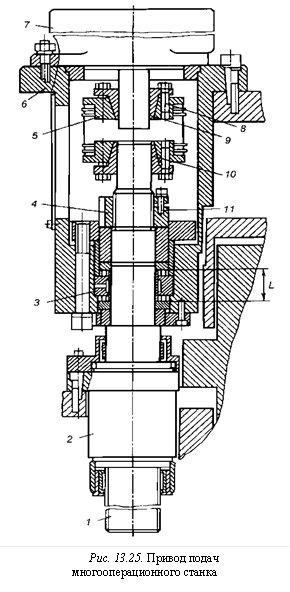
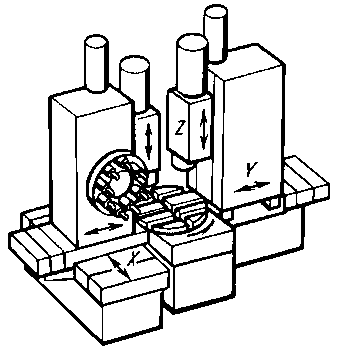
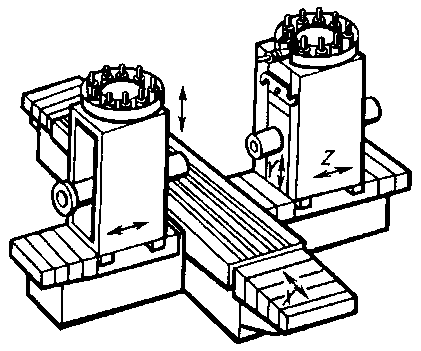
Высокомоментный электродвигатель 7 закреплен на стойке МС с помощью основания 6; он соединен с ходовым винтом 1 винтовой пары качения через сильфонную муфту 5, которую устанавливают на конических втулках 9, 10 и фиксируют болтами 8. Ходовой винт 1 установлен в радиально-упорном подшипнике 3 в расточке основания 6. Натяг в упорном подшипнике регулируется за счет изменения длины L втулки радиального подшипника при соответствующем повороте гайки 4 и последующем стопорении ее винтом 11. Гайка качения 2, работающая в паре с ходовым винтом 1, закреплена на шпиндельной бабке. В электродвигатель встроена тормозная муфта, предотвращающая падение шпиндельной бабки при отключении электропитания. Обратная связь по положению рабочего органа (координата Y) осуществляется с помощью датчика (например линейного индуктосина). 6.4. Модульные многооперационные станки Наибольший эффект от применения многооперационных станков достигается путем использования агрегатно-модульного принципа построения технологического и вспомогательного оборудования. Это обеспечивает: увеличение гибкости при построении компонентов и систем; возможность перехода к типовому проектированию, сокращающему объем и сроки разработки конструкторской документации создания комплексов благодаря запуску в производство основных его унифицированных элементов параллельно с разработкой конструкторской документации; снижение стоимости изготовления компонентов гибких систем вследствие серийного изготовления унифицированных элементов на специализированных заводах; расширение фронта работ по автоматизации производства в машиностроении путем привлечения мощностей заводов-потребителей для сборки и монтажа агрегатов и систем из унифицированных элементов; увеличение надежности работы гибких систем в связи с применением апробированных конструкций унифицированных документов. Модульный, или агрегатный принцип построения оборудования основан на системном подходе, который предусматривает одновременный анализ и обобщение большинства известных задач по автоматизации данного производства. На этой основе разрабатывается комплекс технических средств, функционально дополняющих друг друга и позволяющих компоновать на них широкую номенклатуру автоматизированного оборудования, которое обеспечивает выполнение любой из частных задач. Одновременно разрабатывается комплекс организационно-технических мероприятий, создающих возможность изготовления, комплектации, эффективной эксплуатации и ремонта этих технических средств. На рис. 13.26, а приведена типовая компоновка агрегатного станка с ЧПУ. Станок включает в себя унифицированные узлы, такие как стол поворотный 1, станина центральная 2, арочная стойка 3 со встроенной шпиндельной бабкой 4 (три стойки). На каждой стойке размещены механизм автоматической смены инструментов 5, стол крестовый 6 и два крестово-поворотных стола 7. Обрабатываемую деталь закрепляют на планшайбе поворотного стола, установленного на центральной станине, и обрабатывают с трех сторон одновременно тремя силовыми агрегатами.
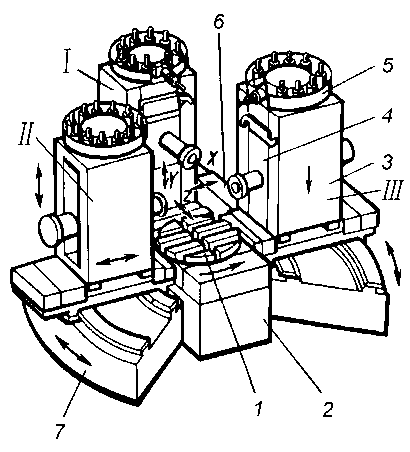
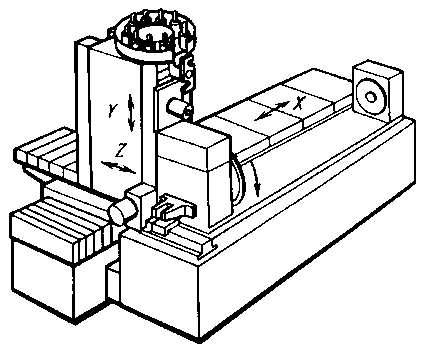
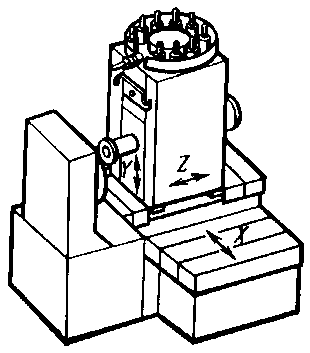
Рис. 13.26. Компоновки многооперационных агрегатных станков с ЧПУ: 1 поворотный стол; 2 станина поворотного стола; 3 стойка; 4 шпиндельный узел; 5 инструментальный магазин; 6 стол прямолинейного перемещения; 7 станина стойки На каждом агрегате обеспечивается перемещение по трем координатам. На всех трех силовых агрегатах шпиндельные бабки перемещаются по направляющим стоек в вертикальном направлении (координаты Y). Стойка со шпиндельной бабкой на агрегате Iустановлена на крестовом столе и перемещается в направлениях оси шпинделя (координата Z) и перпендикулярно к этому направлению (координата X). На агрегатах II и III стойки со шпиндельными бабками установлены на крестово-поворотные столы и перемещаются в направлении оси шпинделя (координата Z) и по дуге, центр которой совпадает с осью планшайбы поворотного стола (координата Е). Возможность перемещения по координате Е позволяет изменять угол между осями трех шпинделей и тем самым производить обработку поверхностей, расположенных на детали под разными углами одновременно тремя агрегатами. Каждый силовой агрегат оснащен инструментальным магазином и механизмом автоматической смены инструмента. На станке возможна автоматическая комплексная обработка детали за один установ. В общем виде такие станки приведены на рис. 13.26: с тремя стойками, горизонтальным расположением шпинделей, вертикальными осями вращения дисковых инструментальных магазинов и поворотного стола (рис. 13.26, а); с одной стойкой, горизонтальным шпинделем, вертикальной осью вращения магазина, горизонтальной осью вращения поворотного стола (рис. 13.26, б, в); с одной стойкой, горизонтальным шпинделем, вертикальной осью вращения магазина, наклонно-поворотным столом (рис. 13.26, г); с двумя стойками, вертикальными шпинделями, горизонтальной осью вращения магазина, вертикальной осью вращения поворотного стола (рис. 13.26, д); с двумя стойками, горизонтальными шпинделями, вертикальной осью вращения магазинов, однокоординатным столом прямолинейного перемещения (рис. 13.9, е). Переналадка агрегатных станков с ЧПУ заключается в смене управляющей программы, зажимного приспособления и набора режущего инструмента в магазине. На рис. 13.27 показана еще одна компоновка агрегатного станка с четырьмя многошпиндельными коробками, каждая из которых предназначена для обработки определенной корпусной детали. Станок оснащен цикловой системой программного управления. При переналадке ГАЛ на станке достаточно повернуть стол с закрепленными на нем шпиндельными коробками и сменить управляющую программу. Для новой обрабатываемой детали на свободную позицию стола устанавливается новая шпиндельная коробка, поэтому можно обрабатывать детали старой и новой модификаций. Качественный уровень агрегатирования оценивается степенью технологической приспособленности системы к производственным задачам так называемым уровнем агрегатирования. Существующие агрегатные станочные системы по уровню агрегатирования можно разделить на три вида: к первому относятся системы, позволяющие создавать станки для обработки деталей различных размеров с геометрически подобным расположением обрабатываемых поверхностей, из различных инструкционных материалов; системы второго вида более совершенны, отличаются более высоким уровнем агрегатирования и позволяют создавать оптимальные модификации станков для комплексной обработки деталей одного технологического класса, отличающиеся не только размерами, но числом и относительным расположением обрабатываемых поверхностей; к третьему виду относятся такие системы, которые помимо реализации первых двух возможностей позволяют создавать станки, удовлетворяющие различным условиям производства с учетом сложности, номенклатуры, серийности и трудоемкости деталей. 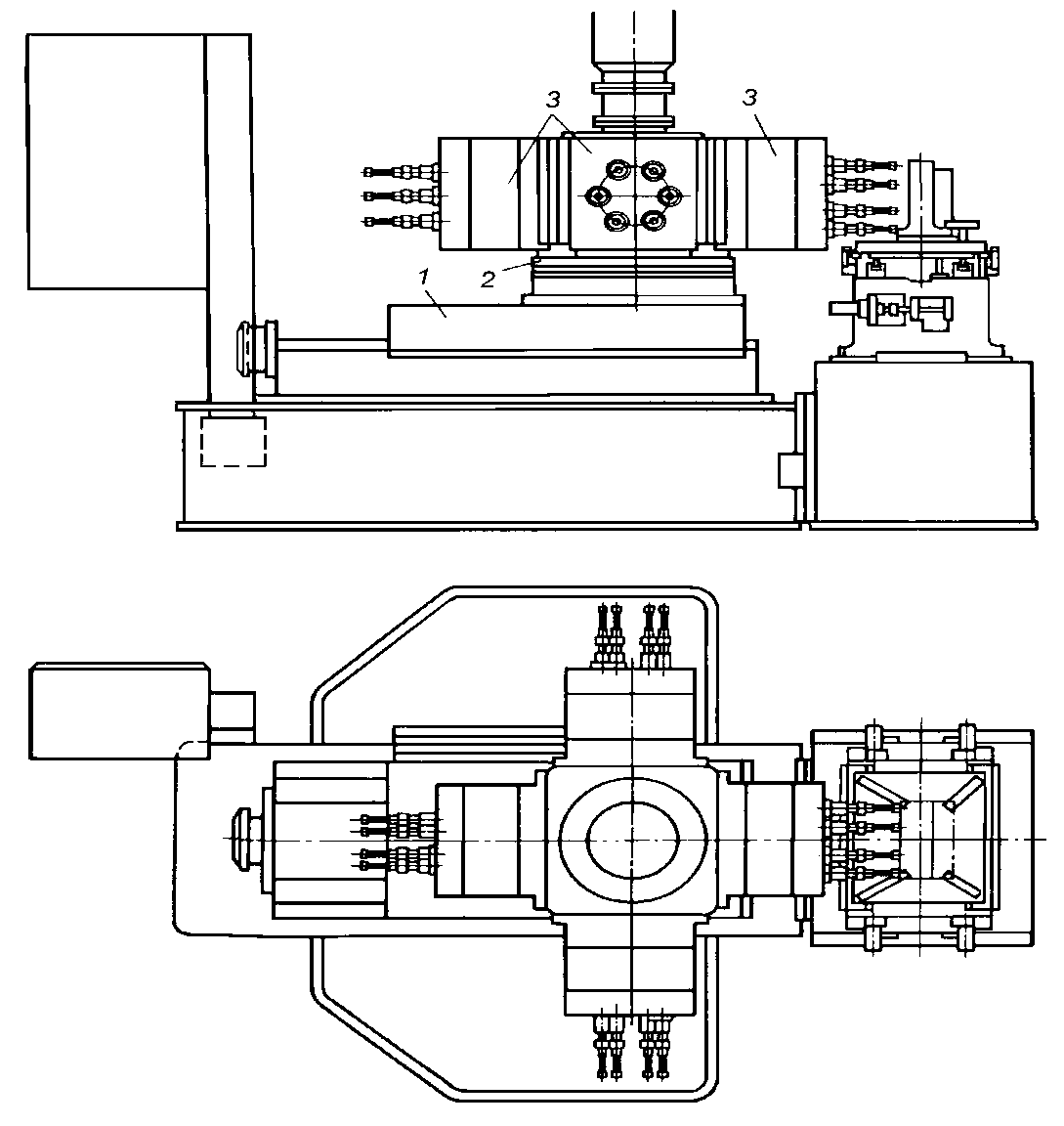 Рис. 13.27. Переналаживаемый агрегатный станок с многошпиндельными коробками: 1 силовой стол; 2 поворотное устройство; 3 многошпиндельные коробки Многооперационный станок с ЧПУ ИР 500МФ4 Горизонтальный МС ИР500МФ4 предназначен для обработки заготовок корпусных деталей, установленных на поворотном столе. На станке производится сверление, зенкерование, развертывание, фрезерование, нарезание резьбы метчиками. Узлы станка смонтированы на общей жесткой станине и имеют следующие технические характеристики: размеры рабочей поверхности стола 500500 мм; наибольшее перемещение подвижных узлов: стола (ось Х) 800 мм, бабки (ось Y) 500 мм, стойки (ось Z) 500 мм; частота вращения шпинделя 21…3000 мин–1; подача 1…2000 мм/мин; скорость быстрых перемещений 10000 мм/мин; число инструментов в магазине 30 шт.; габаритные размеры 600037003100 мм. Кинематическая схема (рис. 13.28). Вращение шпинделю 2 передается от электродвигателя постоянного тока М1 двухступенчатой коробкой скоростей. Частоту вращения шпинделя изменяют регулированием частоты вращения электродвигателя и с помощью коробки скоростей. Переключение частоты вращения шпинделя осуществляют через передачи Приводами перемещений шпиндельной бабки, стойки и стола служат высокомоментные электродвигатли М2, М3, М4 постоянного тока, соединенные муфтами с шариковыми винтами. Поворот стола 1 осуществляется от высокомоментного электродвигателя М5 посредством червячной передачи (Z = 1, Z = 72), а привод поворота инструментального магазина 3 – от высокомоментного электродвигателя М6 через зубчатую передачу. Бесконсольная шпиндельная бабка расположена внутри портальной стойки. Поворотный стол перемещается по отдельной станине. В приводах подачи шпиндельной бабки, стойки и стола применены прецезионные шариковые винтовые пары с предварительным натягом. Опорами шариковых винтов служат прецизионные комбинированные роликовые и радиально-упорные подшипники. Перемещения исполнительных органов станка осуществляются от высокомоментных электродвигателей с постоянными магнитами. Комбинированные направляющие состоят из высокоточных роликовых опор, установленных с предварительным натягом, и накладок, изготовленных из антифрикционного полимерного материала, обладающего низким коэффициентом трения и высокой демпфирующей способностью. Горизонтальный шпиндель 2 станка смонтирован в отдельном корпусе на двух прецизионных подшипниках (один – с цилиндрическими роликами, другой – упорно-радиальный). Зажим инструмента в шпинделе гидромеханический. Привод шпинделя осуществляется от электродвигателя постоянного тока через двухступенчатую коробку скоростей. Автоматическая индексация шпинделя (с управлением УЧПУ) позволяет отводить резец от рабочей поверхности в точно определенную позицию. 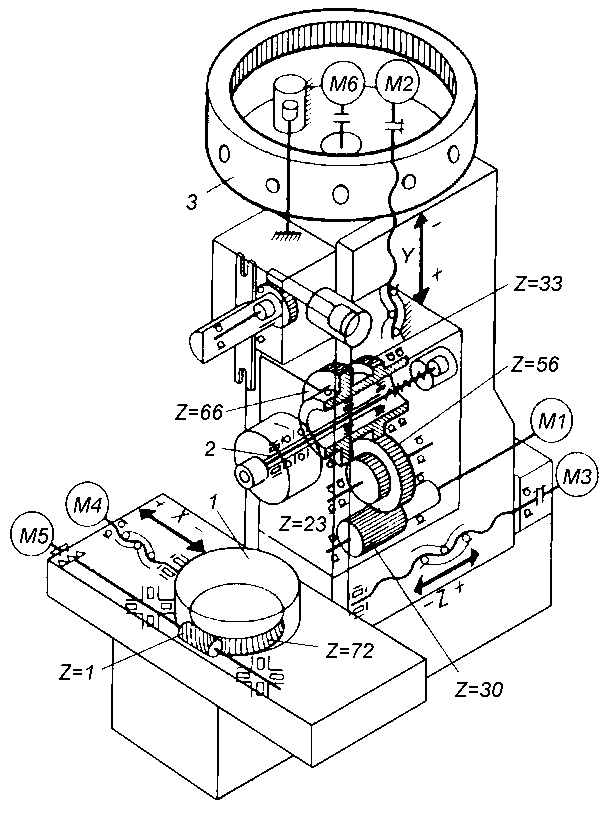 Рис. 13.28. Кинематическая схема горизонтального многооперационного станка ИР500МФ4 Встроенный поворотный делительный стол позиционируется в автоматическом режиме. Для установки и крепления детали на поверхности стола предусмотрена координатная сетка резьбовых отверстий. Отдельно стоящее гидромеханическое поворотное (на угол 180°) устройство автоматической смены ПС позволяет исключать из технологического цикла время на установку и снятие детали. Устройство автоматической смены инструмента, расположенное вне рабочей зоны, состоит из инструментального магазина барабанного типа (с кодированными гнездами) и автооператора. Выбор инструмента возможен в любой последовательности. Питание гидравлических устройств станка осуществляется аксиально-поршневым насосом переменной производительности с автоматическим регулированием расхода масла. В гидросистеме станка имеется гидроаккумулятор с эластичным мешком, обеспечивающим уравновешивание шпиндельной бабки. Все трущиеся детали станка и подшипники шпинделя смазываются с помощью централизованного автоматического дозированного устройства; смазывание зубчатых колес и подшипников главного привода – непрерывное циркуляционное. С  танок оснащен трехкоординатным контурно-позиционным УЧПУ с линейной и круговой интерполяцией (число одновременно управляемых координат две). танок оснащен трехкоординатным контурно-позиционным УЧПУ с линейной и круговой интерполяцией (число одновременно управляемых координат две). Конструкция поворотного стола станка приведена на рис. 13.29. Рис. 13.29. Поворотный стол Поворотный стол содержит червячную передачу 15, 14. Червяк 15 соединен через муфту с высокомоментным электродвигателем. Поворотный стол 5 вместе с фланцем 13 и гидроцилиндром 11 установлен на неподвижной оси 1 в корпусе 18 прямоугольного стола (см. также рис. 8.15, координата X). Перед поворотом выводятся из зацепления полумуфты 2 и 3, фиксирующие поворотный стол относительно корпуса 18, для чего стол приподнимается поршнем 10. При этом масло подается по каналу К4 и стол вместе с гидроцилиндром перемещается вверх до тех пор, пока не будет выбран зазор в упорном шарикоподшипнике 19. Электродвигатель через червячную передачу поворачивает гидроцилиндр и связанный с ним шпонкой 4 стол на заданный угол. По окончании поворота масло подается по каналу К1 и стол опускается с фиксацией зубьями полумуфт. В верхней части поворотного стола расположен гидроцилиндр 9 для закрепления столов-спутников 7, которые базируются пальцами 6, 12 и поджимаются фланцем 8 при подаче масла по каналу К2. Для снятия спутников с фиксаторов масло подается по каналу К3 в верхнюю полость гидроцилиндра 9. Прямоугольный (основной) стол имеет направляющие скольжения с накладками 16, 17, 21 из фторопласта и роликовые направляющие качения 20, 22, 23. Н  а рис. 13.30 показан привод поворота и фиксации инструментального магазина. а рис. 13.30 показан привод поворота и фиксации инструментального магазина. Рис. 13.30. Привод поворота и фиксации инструментального магазина Корпус 19 магазина (с гнездами 20 для инструментальных оправок 21) размещен на верхнем торце стойки 2 станка и может поворачиваться относительно центральной оси. Корпус 19 контактирует со стойкой по поверхностям направляющих 3, 4 и 5, изготовленных из пластмассы. Поворот магазина осуществляется с помощью электродвигателя 10, на валу которого закреплено (на шпонке) зубчатое колесо 12, сопряженное с зубчатым венцом 18, привернутым к корпусу магазина. Угол поворота задают с помощью конечных выключателей 14 и 15, установленных на кронштейне 13. Выключатель 14 взаимодействует с упором 17, фиксирующим исходное положение магазина, а выключатель 15 – с упорами 16, установленными против каждого гнезда и служащими для отсчета гнезд. Магазин оснащен устройством, фиксирующим гнездо после очередного поворота в положении смены инструмента. На валу электродвигателя закреплен диск 11 с двумя полукруглыми пазами П. Когда инструментальное гнездо подходит к позиции смены, ролик 9 вводится (штоком гидроцилиндра 6) в паз диска. При этом электродвигатель 10 отключается, магазин точно фиксируется, бесконтактный выключатель 8 дает команду в систему управления и начинается автоматическая смена инструмента. Перед следующим поворотом ролик 9 выводится из паза диска и бесконтактный выключатель 7 дает команду на выключение электродвигателя 10 поворота магазина. Инструментальные оправки 21 фиксируются в гнездах фиксаторами 24, шариками 23 и пружинами 22. Наличие оправки в гнезде контролируется бесконтактным датчиком 1. Особый интерес в станке, с конструкторской точки зрения, представляют конструкции автооператора для замены инструмента в шпинделе и устройство для автоматической смены приспособлений-спутников. Автооператор (рис. 13.31, а) размещен над шпиндельной бабкой станка. Между его захватами-рычагами 9 и 10 установлены пружины 13 (рис. 13.31, б), стремящиеся повернуть захваты относительно осей 11 и 12. Захваты смонтированы в корпусе 20 (см. рис. 13.31, а), соединенном с гильзой 18. В крышке 17 гильзы закреплен шарикоподшипник 16, посаженный на конец штока 15 гидроцилиндра 21. При перемещении поршня 22 вместе со штоком 15 движется и гильза 18 с захватами. При этом инструментальные оправки изымаются из гнезда магазина или из посадочного конуса шпинделя. Чтобы затем поменять инструменты местами, необходимо повернуть на 180° корпус 20 с захватами, для чего служит гидроцилиндр 8. Шток гидроцилиндра соединен с рейкой 3, которая находится в зацеплении с зубчатым венцом 2, закрепленным на стакане 1. Правый конец стакана сопряжен (двумя длинными шпонками 14 и 19) с гильзой 18. Поэтому гильза (а вместе с ней и корпус 20 захватов) поворачивается вместе со стаканом 1. Длинные шпоночные пазы позволяют гильзе с захватами совершать необходимые продольные перемещения. Чтобы захватить инструмент из магазина, корпус автооператора 4 поднимается с помощью гидроцилиндра 6 по направляющим 5 и 7 в крайнее верхнее положение, при котором один из захватов фиксирует фланец инструментальной оправки, подготовленной (соответствующим поворотом магазина) к подаче в шпиндель станка. В дальнейшем при изъятии из магазина и переносе в шпиндель оправка удерживается пружинами 13 (см. рис. 13.31, б). Для того чтобы в момент поворота корпуса 20 (см. рис. 13.30, а) захватов оправка (с инструментом) не выскочила из захвата под действием центробежной силы, предусмотрено предохранительное устройство. В крайнем правом положении корпуса 20 (т.е. когда происходит поворот) внутренние концы К рычагов упираются в шпонки 14 и 19, что не позволяет рычагам сблизиться и освободить оправку. Устройство для автоматической смены приспособления-спутника (ПС) показано на рис. 13.32. Приспособление-спутник 11 устанавливают на платформу 7 (вместимостью два спутника), на которой смонтированы гидроцилиндры 10 и 13, штоки которых имеют Т-образные захваты 14 и 6.
Рис. 13.32. Устройство для автоматической смены ПС При установке на платформу (перемещение по стрелке Б) приспособление-спутник своим фигурным вырезом 12 входит в зацепление с захватом 14 штока. На платформе приспособление-спутник базируется на роликах 9 и центрируется (по боковым сторонам) роликами 8 (исходное положение приспособления-спутника в позиции ожидания). Перемещение штока гидроцилиндра 10 обусловливает качение (по роликам) спутника. П  ри выдвижении штока гидроцилиндра 13 захват 6 перемещается (по направляющей штанге) и катит приспособление-спутник по роликам 9 и 8 (в направлении стрелки А) на поворотный стол станка, где спутник автоматически опускается на фиксаторы. В результате захват 6 выйдет из зацепления с приспособлением-спутником и стол станка (с закрепленным на нем спутнике) на быстром ходу переместится в зону обработки. ри выдвижении штока гидроцилиндра 13 захват 6 перемещается (по направляющей штанге) и катит приспособление-спутник по роликам 9 и 8 (в направлении стрелки А) на поворотный стол станка, где спутник автоматически опускается на фиксаторы. В результате захват 6 выйдет из зацепления с приспособлением-спутником и стол станка (с закрепленным на нем спутнике) на быстром ходу переместится в зону обработки.Заготовку закрепляют на спутнике во время обработки предыдущей заготовки (когда приспособление-спутник находится в позиции ожидания) или заранее вне станка. После того, как заготовка будет обработана, стол станка автоматически (на быстром ходу) передвигается вправо к устройству для смены спутника и останавливается в таком положении, при котором фигурный паз приспособления-спутника оказывается под захватом 6. Гидроцилиндр поворотного стола расфиксирует спутник, после чего приспособление-спутник входит в зацепление с захватом 6. Затем масло поступает в штоковую полость гидроцилиндра 13, шток смещается в крайнее правое положение и перемещает спутник с заготовкой на платформу 7, где уже находится приспособление-спутник с новой заготовкой. Чтобы поменять спутник местами, платформа поворачивается на 180° (на стойке 15) зубчатым колесом 3, сопряженным с рейкой 4, приводимой в движение гидроцилиндрами 5 и 16. Платформу 7 точно выверяют относительно поворотного стола станка с помощью регулировочных винтов 2 и 17, ввернутых в выступы базовой плиты 1, неподвижно закрепленной на фундаменте. |