Проект по модулю
 Скачать 1.27 Mb. Скачать 1.27 Mb.
|

Извлекатель оправок трубопрокатного агрегатаМеханизм предназначен для извлечения оправок из труб, прокатанных на непрерывном стане. Кинематическая схема представлена на рис. 12. 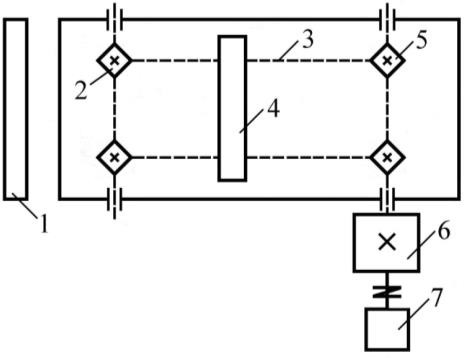 Рис. 12. Кинематическая схема электропривода извлекателя оправок трубопрокатного агрегата: 1– упорный люнет; 2– звездочка; 3– две непрерывные цепи; 4–два захвата; 5– звездочка; 6– редуктор; 7 – двигатель Извлекатель имеет две непрерывные цепи, перекинутые через звездочки, одна их которых приводится во вращение через редуктор электрическим двигателем. С помощью цепей перемещаются два захвата. Захват оправки производится на пониженной скорости, после чего происходит разгон до полной. Труба с оправкой подается рольгангом к извлекателю. При подходе к упорному люнету 1подается команда для запуска двигателя извлекателя, а затем и люнета. При этом люнет охватывает оправку, предохраняя трубу от заклинивания при извлечении. В конце хода люнета двигатель извлекателя разгоняется до скорости захвата, происходит зацепление оправки с захватом, и двигатель начинает разгоняться до полной скорости извлечения. Оправка подается на рольганг за извлекателем для передачи на возвратный поток. Требования к электроприводуРежим работы повторно-кратковременный (более 200 вкл/ч). Диапазон регулирования скорости не менее 10:1 (в зависимости от скорости захвата и извлечения).  Статическое падение скорости не более 6 % при изменении момента от 0 до значения МN. Статическое падение скорости не более 6 % при изменении момента от 0 до значения МN.Расчетные выраженияСтатическая мощность на валу двигателя при извлечении, Вт, P FИVИ , (47) CT η где fи – усилие извлечения, Н; Vи – установившаяся скорость извлечения, м / с; – КПД передачи. Статический момент извлечения, Нм, M FИ DЗ , C 2 (48) где Dз – диаметр начальной окружности звездочки. Передаточное число редуктора при заданной скорости извлечения и выбранной скорости двигателя i ωNDЗ , 2VИ Полный статический момент при извлечении (49) Мс полн = Мс + Мхх. (50) |