Проект по модулю
 Скачать 1.27 Mb. Скачать 1.27 Mb.
|

Механизм поворота платформы шагающего экскаватораОписание механизмаМеханизм предназначен для горизонтального перемещения стрелы шагающего экскаватора с ковшом (рис. 14). 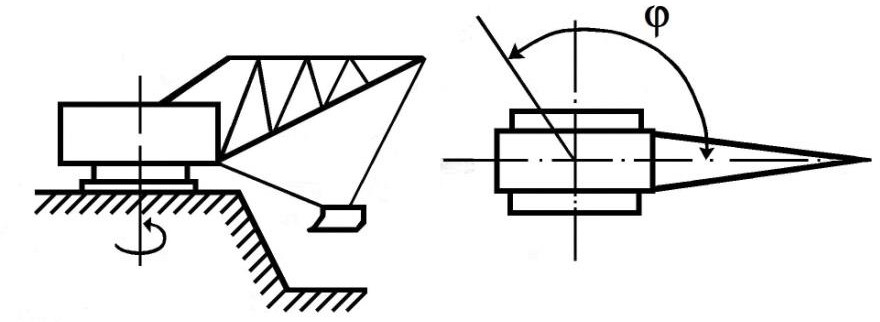 Рис. 14. Общий вид шагающего экскаватора Цикл работы механизма состоит из следующих этапов. Ковш набирает породу, в это время привод поворота платформы не работает. Затем происходит поворот платформы на некоторый угол , который зависит от конкретных условий отработки забоя. Обычно в качестве расчетного угла поворота принимается = 120°. Высыпание породы из ковша начинается еще до полной остановки привода поворота, поэтому отдельной паузы для опорожнения ковша нет, сразу после торможения начинается разгон в обратную сторону. Пауза (t0) для забора грунта определяется особенностями грунта и составляет 8–20 с. Обычно считают, что отработка полного цикла с углом 120° должна занимать 60 с. Примерный вид тахограммы и нагрузочной диаграммы показан на рис. 15. 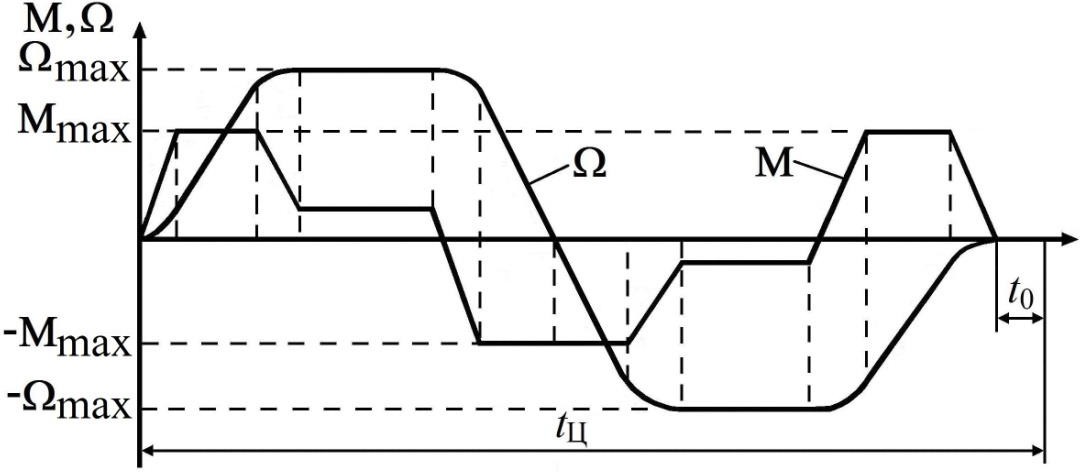 Следует заметить, что из-за больших пространственно-распределенных масс и наличия ковша на гибкой подвеске для данного привода важным является требование ограничения рывка. Это требование реализуется ограничением темпа изменения момента двигателей на уровне 1–1,5 номинала в секунду, что видно на рис. 15. Следует заметить, что из-за больших пространственно-распределенных масс и наличия ковша на гибкой подвеске для данного привода важным является требование ограничения рывка. Это требование реализуется ограничением темпа изменения момента двигателей на уровне 1–1,5 номинала в секунду, что видно на рис. 15.Рис. 15. Тахограмма и нагрузочная диаграмма электропривода поворота платформы шагающего экскаватора Привод поворота платформы всегда выполняется по многодвигательному варианту с числом двигателей от 4 до 8. При этом существуют два варианта построения таких приводов: безредукторный (рис. 16, а) и редукторный (рис. 16, б). 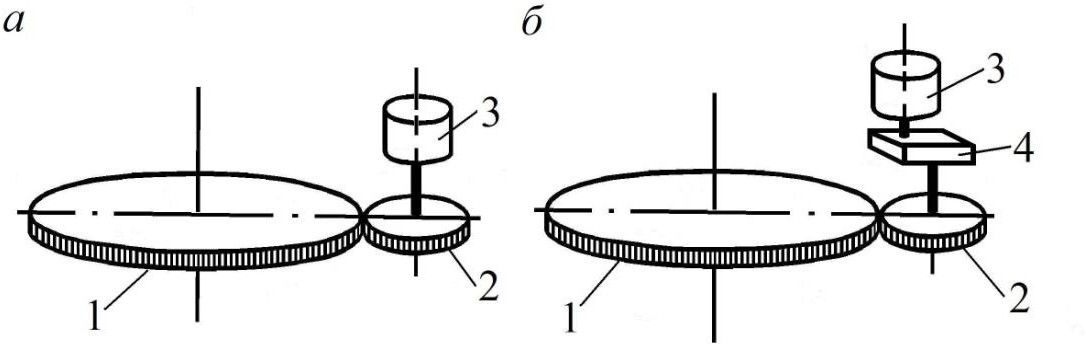 Рис. 16. Варианты кинематической схемы электропривода поворота платформы шагающего экскаватора: 1– венцовая шестерня, связанная с поворачиваемой частью экскаватора; 2– ведущая шестерня; 3– электродвигатель; 4– редуктор Варианты конструктивно-технологических параметровОсновные данные экскаваторов приведены в табл. 7. Варианты выполнения электрических схем силовых цепей показаны на рис. 17. 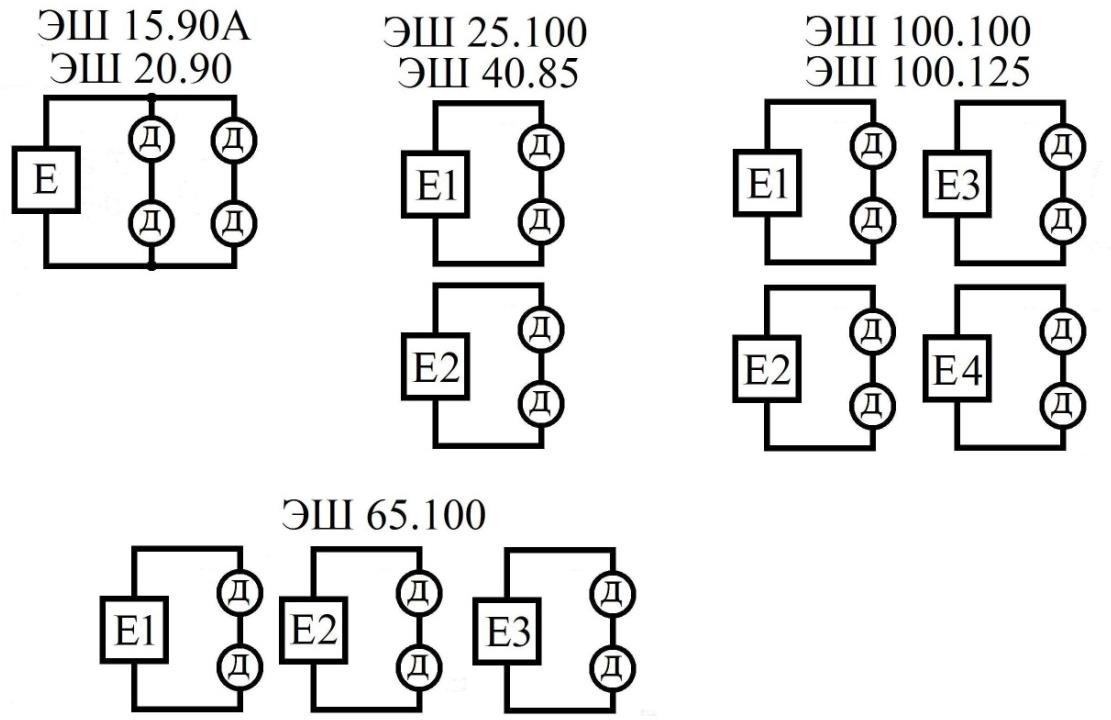 Рис. 17. Варианты силовых схем для электропривода поворота платформы шагающего экскаватора: Е– источник питания; Д– двигатель Таблица7
Примечания:1. Значения Мсрм, Jрм1, Jрм2 приведены к оси центральной цапфы – оси вращения венцовой шестерни. 2. Моменты инерции даны для положения ковша на 2/3 вылета стрелы. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||