«Разработка программного комплекса моделирования оценок характер. Разработка программного комплекса моделирования оценок характеристик и точности навигационных параметров технических средств судовождения
 Скачать 1.47 Mb. Скачать 1.47 Mb.
|

1.1.3 Теоретическая оценкаДля теоретической оценки параметров чувствительного элемента необходимо воспользоваться уравнением, характеризующим закон движения его главной оси в азимуте в режиме затухающих колебаний: параметры В, С, Н и Так как характеристическое уравнение, соответствующее данному дифференциальному уравнению, является алгебраическим уравнением третьей степени, но необходимо, пользуясь формулой Кардана, или на ЭВМ рассчитать корня этого уравнения для заданной широты, т.е. Приняв угол начального отклонения главной оси чувствительного элемента равным экспериментальному отклонению, и с учетом найденных значений где t изменяемся от 0 до 21600 с, с шагом 180 с (12 точек). Полученную траектория движения оси чувствительного элемента представить в виде графика и снять с него значения периода затухающих колебаний и фактора (средние значения). Затем сравнить эти значения со значениями, найденными по формулам Таблица 1.1 Сравнительная оценка параметров
1.2 ГИРОКОМПАС НА ПОДВИЖНОМ ОСНОВАНИИ1.2.1 Влияние постоянного режима движения судна на параметры гирокомпасаПри движении судна по шарообразной поверхности Земли возникает дополнительное вращение плоскости горизонта, которое складывается с угловыми скоростями вращения Земли. Рассмотрим это явление для судна, идущего постоянными курсом и скоростью. Как известно, вектор 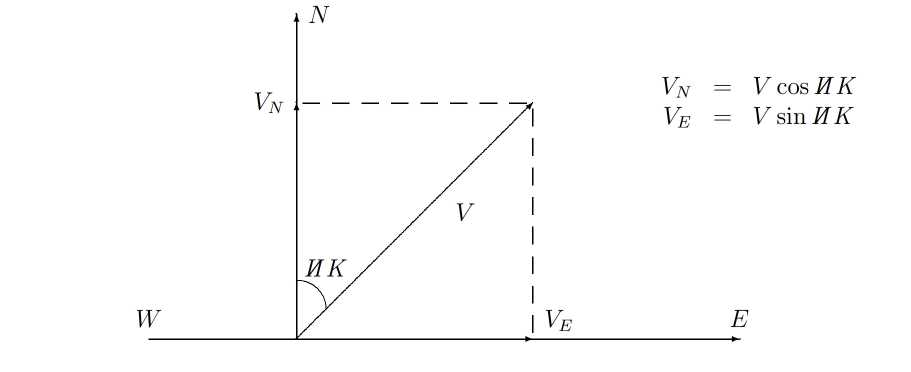 Рисунок 1.1 – Вектор скорости Так как радиус параллели Очевидно, что вектор 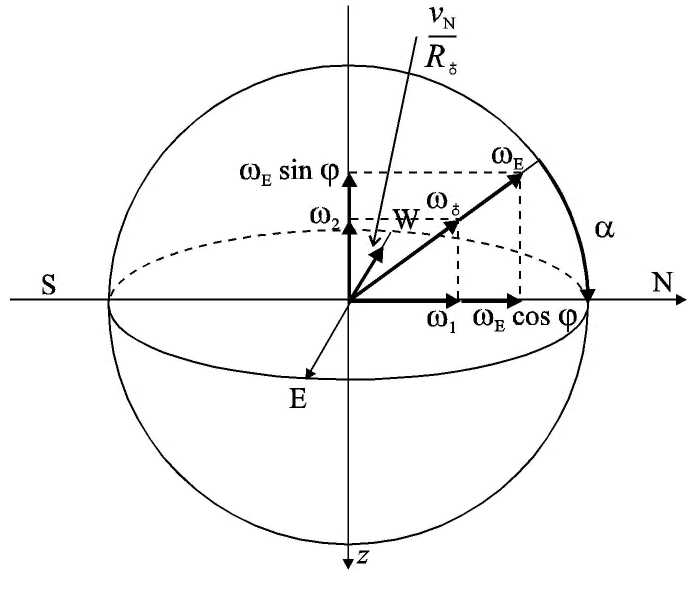 Рисунок 2.1- Составляющие горизонтального и вертикального вектора скорости Таким образом, к вертикальной составляющей угловой скорости вращения Земли добавится: а к горизонтальной составляющей добавится  (1.7) (1.7)При движении судна по меридиану со скоростью При малом угле  (1.9) (1.9)Получены уравнения движения ЧЭ гирокомпаса для случая, когда к нему не приложены корректирующие моменты. В уравнениях отображено вращение горизонта в инерциальном пространстве, как вследствие вращения Земли, так и вследствие движения судна. Последнее обстоятельство вносит в показания гирокомпаса дополнительные погрешности. Данные погрешности, а также широтная девиация исключаются из его показаний с помощью корректирующих моментов. Также при движении судна с постоянными скоростью и курсом изменяется такие параметры компаса, как направляющий момент ( Так, для гирокомпаса типа “КУРС” расчетные формулы могут быть записаны в виде (2.0, 2.1, 2.2, 2.3, 2.4): | ||||||||||||||