Сборник статей по итогам Международной научно практической конференции 04 мая 2018
 Скачать 2.25 Mb. Скачать 2.25 Mb.
|

Список использованной литературыМитио Каку: дополненная реальность — будущее нефтегазовой отрасли: [Электронный ресурс] // ARNEXT. URL: https: // planetvrar.com / . (Дата обращения: 11.11.2014). Защищённый «умный» шлем от Daqri: [Электронный ресурс] // promsiz. URL: http: // promsiz.info / . (Дата обращения: 09.09.2014). Что такое дополненная реальность: принцип работы, устройства, будущее технологии: [Электронный ресурс] // PlanetVRAR. URL: http: // arnext.ru / . (Дата обращения: 13.07.2017). Omega Gemini Refractive Capsule – дополненная реальность в глазах Источник: http: // itcrumbs.ru: [Электронный ресурс] // iTCrumbs. URL: http: // itcrumbs.ru / . (Дата обращения: 07.08.2017). © Хисматуллина И.З., 2018 Холодилов С. В.магистрант СФУ г. Железногорск Красноярского края, РФ Холодилова В. А.магистрант СФУ г. Железногорск Красноярского края, РФ ЗАКОНОМЕРНОСТИ ВЫБОРА ТИПА ЭЛЕКТРОМЕХАНИЧЕСКОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА СИСТЕМЫ ОРИЕНТАЦИИИ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА АннотацияПеред разработчиками современных космических аппаратов (КА) при проектировании систем ориентации и стабилизации (СОС) остро встает задача выбора типа электромеханического исполнительного органа (ЭМИО) наиболее предпочтительного для заданного космического аппарата. Для решения этой задачи в статье приведено сравнение абсолютных и удельных характеристик различных типов ЭМИО и рассмотрены достоинства и недостатки каждого типа ЭМИО. В результате сравнения выявлено, что наиболее предпочтительным и универсальным типом ЭМИО является гиростабилизатор. Ключевые слова: система ориентации и стабилизации, электромеханический исполнительный орган, двигатель - маховик, гиродин, гиростабилизатор. В системах ориентации и стабилизации (СОС) большинства современных космических аппаратов (КА) в качестве исполнительного органа входит электромеханический исполнительный орган (ЭМИО). Достоинствами данного типа исполнительного органа являются отсутствие потребности в рабочем теле или топливе и быстрота ориентации. Электромеханические исполнительные органы могут выполнять свою целевую задачу в течение всего срока существования КА [1,2]. В условиях жесткой конкуренции между производителями КА цена космического аппарата вынужденно снижается, а, следовательно, должны быть снижены и издержки по созданию и выводу на орбиту КА. Издержки по выводу КА на орбиту напрямую зависят от массы КА, а, следовательно, важным условиям для разработчиков ЭМИО является его малая масса при условии сохранения работоспособности КА в течение всего срока существования КА. Таким образом, для выполнения целевой задачи КА его ЭМИО должен иметь минимальную массу при максимальной надёжности. Такой результат, может быть достигнут исключительно рациональным выбором конструкции и характеристик ЭМИО. Для анализа основных характеристик произведем сравнение параметров исполнительных органов СОС на примере ЭМИО производства НПЦ «Полюс» (г. Томск), выбрав разные по способу создания управляющего воздействия ЭМИО, такие как: «Агат - 9», «Агат - 15», «17М71», «Агат - 10», «ГД - 02 - 150», «Агат - 5». Упростим сравнение, приведя характеристики ЭМИО к удельным по массе и энергопотреблению всего комплекта [3]. Определяющим показателем ЭМИО является создаваемый им полезный управляющий момент. Кроме того решающими могут оказаться масса и энергопотребление всего комплекта (см. табл.1). Таблица 1. Сравнительные характеристики ЭМИО различных типов
Основными преимуществами ЭМИО на базе двигателей - маховиков являются: Простота конструкции, и как следствие, сведение к минимуму числа отказов механического блока. Однозначность приложения управляющего момента только к одной из осей. К недостаткам ЭМИО на базе двигателей - маховиков можно отнести: Необходимость установки нескольких механических блоков для обеспечения ориентации КА; Большой расход энергии для создания управляющего момента ЭМИО и некоторое запаздывание относительно возмущающего момента по сравнению с гиродином. Основными преимуществами ЭМИО на базе гиродинов являются: Ориентация КА в пространстве производится по нескольким осям; Возможность быстро произвести ориентацию КА в пространстве с большей точностью и самоуспокоение гиродина, когда достигается цель ориентации. Меньший расход энергии для создания управляющего момента ЭМИО. К недостаткам ЭМИО на базе гиродинов можно отнести: Сложность конструкции; Наличие перекрестных связей между осями гиродина и как следствие, некоторая дестабилизация ЭМИО относительно осей не участвующих в стабилизации; Большое энергопотребление ввиду непрерывного поддерживающего постоянным кинетический момент ротора гиродина. Гиростабилизатор объединяет в себе основные преимущества двигателей - маховиков и гиродинов, его преимуществами являются: Ориентация КА в пространстве производится по всем трем осям КА; Меньшая масса, Возможность быстро и точно произвести ориентацию КА в пространстве, что особенно актуально; Энергопотребление для создания управляющего момента ЭМИО по сравнению с двигателями - маховиками меньше, но больше чем для гиродинов, поскольку гиростабилизатор работает одновременно и в режиме двигателя - маховика и в режиме гиродина. К недостаткам ЭМИО на базе гиростабилизаторов можно отнести: Сложность конструкции; Ограниченность по величине управляющего момента. Таким образом, самыми лучшими показателями обладают гиростабилизаторы и их применение более оправдано. Единственной областью в ракетно - космической отрасли, где они могут оказаться неконкурентоспособными, является использование в системе СОС для КА, летающих на эллиптических орбитах [4]. Список использованной литературыХолодилов С. В. Перспективы повышения ресурсных характеристик электромеханического исполнительного органа космического аппарата // Вестник СибГАУ. – Том. 17. – №3. – 2016. – С. 760 - 767. Дмитриев В. С., Костюченко Т. Г., Гладышев Г. Н. Электромеханические исполнительные органы систем ориентации космических аппаратов. Часть 1. – Томск: Издание Томского политехнического университета, 2013. – 208 с. Раушенбах Б. В., Токарь Е. Н. Управление ориентацией космических аппаратов. – М.: Наука, Главная редакция физико - математической литературы, 1974. – 600 с. АО «Научно - производственный центр «Полюс» [Электронный ресурс]: режим доступа – http: // polus.tomsknet.ru (дата обращения 20.04.2017). © Холодилов С. В., Холодилова В.А., 2018 год. Холодилова В. А.магистрант СФУ г. Железногорск Красноярского края, РФ МОДЕЛИРОВАНИЕ МАГНИТНОЙ ОПОРЫ ЭЛЕКТРОМЕХАНИЧЕСКОГО УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА НА ПОСТОЯННЫХ МАГНИТАХВ ПАКЕТЕ ANSYS АннотацияВ статье рассматриваются вопрос построения математической модели магнитной опоры электромеханического устройства космического аппарата в специализированном пакете программ Ansys Maxwell Ключевые слова: магнитная опора, космический аппарат, электромеханический исполнительный орган, САПР. В настоящее время к космической технике, используемой в военных и коммерческих целях, предъявляются все более высокие требования к ресурсу и надежности, при сохранении жестких требований по предельной массе и стоимости космического аппарата (КА). Кроме всех прочих, в космической технике остро стоит вопрос сохранения работоспособности электромеханических узлов, входящих в состав таких важных элементов КА, как гидронасосы системы терморегулирования, электромеханические исполнительные органы системы ориентации и стабилизации (СОС), приводы солнечных батарей и антенн. Самым критичным элементом данных электромеханических узлов КА является их опора, выполненная на основе шарикоподшипника. Шарикоподшипниковая опора в условиях космического пространства не может быть подвергнута обслуживанию или заменена, поэтому выход её из строя критичен как для узла КА, так и для всего КА. Возможной альтернативой шарикоподшипниковой опоры может быть магнитная опора, желательно на постоянных магнитах, которая обеспечивает работы электромеханического узла без затрат энергии КА [1]. При разработке электромеханических узлов КА с магнитной опорой на постоянных магнитах остро встает вопрос построения адекватной модели данной опоры, путем моделирования электромагнитных полей. Поскольку взаимодействие магнитных полей в зазоре между ротором и статором является труднопрогнозируемым, то рациональным будет применение специализированных программы для анализа процессов (САПР), происходящих в нем, что привело к необходимости численного моделирования процессов. Среди современных САПР существует ряд программ для моделирования электромагнитных полей: пакет программ Femm. Достоинством является невысокая требовательность к мощности ЭВМ, доступность. Основной недостаток – это отсутствие возможности решения задач в трехмерной постановке [2]. пакет программ ELCUT. Достоинствами являются: отсутствие необходимости в построении густой сетки разбиения, при сохранении правильного вычисления значений на ребрах модели. При наличии в исходной модели симметрии существенно ускоряется решение задач. Кроме того, в данном пакете применен специальный вид граничных условий. Однако интерфейс остается неудобным [3]. пакет программ ANSYS Maxwell. Достоинствами пакета программ ANSYS Maxwell являются: наличие расширенной библиотеки свойств материалов, полная автоматизация разбиения модели на конечные элементы и расчетов при различных сочетаниях параметров, поддержка и редактирование скриптов в особых ситуациях. Также существуют дополнительные программы, расширяющие возможности Maxwell (ePhysics, Simplorer), а также программы, упрощающие процесс моделирования в Maxwell (RMxprt, PExprt, Optimetrics, Maxwell Circuit Editor, Q3D Extractor) [4]. пакет программ Ansys Multiphysics. Достоинством пакета программ Ansys Multiphysics является способность решать любые электромагнитные и тепловые задачи в 2D и 3D, с возможностью наложения механической составляющей. Недостатком является довольное большое время расчета, несовершенный построитель сетки, необходимость в серьезных компьютерных ресурсах [5]. Перечисленные ранее пакеты программ используют для расчетов метод конечных элементов, основанный на аппроксимации непрерывной функции (температуры, напряжённости магнитного поля, магнитной индукции, перемещения и т.д.) дискретной моделью, которая строится на множестве кусочно - непрерывных функций [6]. На фоне рассматриваемых аналогов наилучшей с точки зрения простоты освоения и широты возможностей для проведения электромагнитных расчетов наиболее подходит пакет программ ANSYS Maxwell [7]. Для решения задач магнитостатики ANSYS Maxwell использует в своем решателе основные уравнения (1.1 и 1.2) Ax⃗H→ = 𝐽→ , (1.1) A · ⃗B→ = 0, (1.2) кроме того, используется следующая важная зависимость (1.3): 𝐵⃗→ = 𝜇0(𝐻⃗→ + 𝑀⃗→) = 𝜇0𝜇𝑟𝐻⃗→ + 𝜇0𝑀⃗→𝑝 , (1.3) где: 𝐻⃗→ – напряженность магнитного поля; 𝐵⃗→ – плотность магнитного потока; – плотность тока проводимости; ⃗ ⃗⃗⃗⃗ – постоянное намагничивание; – магнитная проницаемость вакуума; – относительная магнитная проницаемость. Для создания в среде ANSYS Maxwell математической модели опоры построена геометрическая пространственная модель (рис. 1), состоящая из двух основных частей: ротора 1 и статора 2. Конические элементы ротора и статора выполнены из неодим - железа NdFe с коэрцитивной силой 837999,999 А / м с осевой намагниченностью однонаправленной относительно друг друга. Цилиндрические элементы модели выполнены из магнитомягкого металла с удельной электрической проводимостью 1610000 См / м и являются магнитопроводом.   Рис. 1 Геометрическая пространственная модель Задана поверхностная сетка (рис. 2) разбиения всех составных частей модели на конечные элементы. Определены граничные условия моделируемой области 3 (рис. 1), таким образом, чтобы исключить ошибку влияния границ на результаты расчетов, рассматривая ее в бесконечно пустом пространстве, и одновременно не завышая время анализа программы. Такая методика часто применяется при небольших объектах или частях сложных систем [6]. 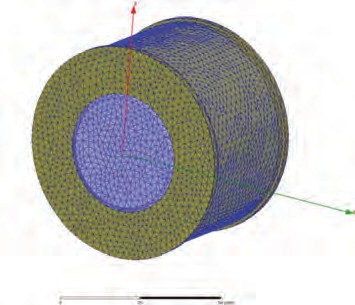 Рис. 2 Геометрическая пространственная модель с поверхностной сеткой разбиения на конечные элементы По результатам просчета модели программой отображается распределение магнитного поля, направление вектора и величину напряженности магнитного поля (рис. 3). Как видно, рабочий магнитный поток, создающий взаимные силы отталкивания, сосредоточен на участках 1 и 2. Распределение магнитного потока на участке 2, представляет основной интерес, поскольку важно для функционирования опоры.  Рис. 3 Распределение магнитного поля в зазоре опоры Модель позволяет рассчитать трехмерное пространственное распределение электрического магнитного поля, определить магнитную индукцию, напряженность магнитного поля в каждой точке зазора и на основании этого сделать вывод о величине и направлении силы магнитного взаимодействия ротора и статора магнитной опоры ЭМИО. Данная модель может быть применена для проектирования реальной магнитной опоры используемой в электромеханических устройствах космического аппарата, таких как двигатели - маховики или гиростабилизаторы системы ориентации. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||