Сау_ла. Системы автоматического управления летательными аппаратами
 Скачать 1.25 Mb. Скачать 1.25 Mb.
|

ПриложениеАвтомат тяги АТ-5 в АБСУ-134А1. НазначениеАвтомат тяги АТ-5 предназначен для стабилизации и управления скоростью полета самолета Ту-134 при заходе на посадку. Автомат входит в состав автоматической бортовой системы управления АБСУ-134А и представляет собой автоматический регулятор, который выводит самолет на заданную летчиком скорость полета и поддерживает эту скорость постоянной, воздействуя на сектора газа двигателей самолета. Автомат обеспечивает: дистанционное управление величиной заданной скорости полета, автоматический выход самолета на заданную скорость и ее стабилизацию с точностью Автоматическое управление скоростью полета, существенно облегчает работу летчика, освобождает его внимание для проведения других операций. 2. Состав (комплектность)Автомат тяги АТ-5 состоит из блоков и агрегатов, приведенных в таблице.
Продолжение прил.3. Устройство и работа изделияАвтомат тяги является автономным устройством, включающим в себя необходимые датчики и органы управления, за исключением датчиков угла тангажа ( Автомат измеряет разность между текущей и заданной приборными скоростями полета самолета. Сигнал пропорциональный этой разности, вместе со вспомогательными сигналами, характеризующими режим полета (сигнал тангажа, сигнал пропорциональный линейному ускорению по оси x), поступает в вычислитель, который преобразует их в соответствии с законом управления. Выходной сигнал вычислителя управляет интегрирующим приводом, перемещающим сектора газа двигателей самолета, в результате чего изменяется тяга двигателей. Изменение тяги самолетных двигателей приводит к изменению скорости полета в направлении уменьшения рассогласования, тем самым стабилизируется заданная скорость полета. Функциональная схема автомата представлена на рис. П1. Функционально автомат тяги включает в себя пульт управления ПУ с расположенными на нем органами управления автоматом, указатели текущей приборной скорости с индексом заданной скорости и датчиками сигнала рассогласования текущей и заданной приборной скоростей (V), блок датчиков линейных ускорений, сигнализатор нарушения питания, вычислитель, привод и систему встроенного контроля. Переключатели задания скорости в комплект автомата тяги не входят. Указатели скорости УС-И устанавливаются на приборных досках левого и правого летчика. Задание скорости может производиться только по одному указателю, в зависимости от положения на ПУ-37 переключателя «УС-И лев – УС-И прав». На вход вычислителя (рис. П1) поступает сигнал V с указателя скорости, Одновременно на усилитель привода заводится сигнал скоростной обратной связи с исполнительного механизма. Продолжение прил.  Рис. П1. Функциональная схема автомата тяги АТ-5 Продолжение прил. Система встроенного контроля включает в себя аналог, имитирующий работу вычислителя и привода автомата, компаратор (К), пороговое реле (РП), реле времени (РВ), а также элементы логики и коммутации. Вычислитель, усилитель привода, элементы коммутации и логики, а также система встроенного контроля конструктивно оформлены в виде блока автоматики БА-17. Кроме того, в блоке БА установлены усилитель следящей системы (УСС) и фазочувствительный усилитель (ФЧУ) прибора УС-И лев, инвертор в цепи подслеживания индекса левого УС-И при задании скорости по правому УС-И, РП для выдачи сигнала при разности показаний левого и правого УС-И V = 15…20 км/час. УСС и ФЧУ правого УС-И, инвертор в цепи подслеживания индекса правого УС-И при задании скорости по левому УС-И, РП для выдачи сигнала при V = 15…20 км/час на глиссаде находится в блоке связи БС-26. Исполнительным механизмом, перемещающим сектор газа, служит ИМАТ, который состоит из управляемого двигателя-генератора (М, Г1), электромагнитной порошковой муфты ЭМ1, служащей для включения автомата, редуктора, электромагнитных порошковых муфт (ЭМ2, ЭМ3), служащих для подключения секторов газа и пересиливания работающего механизма ИМАТ, аварийных фрикционных муфт пересиливания (МП1, МП2), служащих для пересиливания неисправного механизма ИМАТ. 4. Режимы работы Автомат тяги работает в режимах «Подготовка» и «Управление». 4.1. Режим «Подготовка» Режим «Подготовка» необходим для того, чтобы непосредственно после включения автомата в режим «Управление» происходила стабилизация текущей скорости полета, т.е. для осуществления безрывкового включения автомата в режим «Управление». Продолжение прил. В режим «Подготовка» автомат вводится включением выключателя «Подготовка посадки» на ПУ. При этом происходит согласование индекса заданной скорости со стрелкой текущей скорости в приборах УС-И и выход усилителей УПТ и БДЛУ на рабочий режим. Через 8,5…11,5 сек после включения «Питание» включается встроенная система контроля автомата. Таким образом, перевод автомата из режима «Подготовка» в режим «Управление» должен производиться после согласования индекса и стрелки в УС-И, но не ранее, чем через 12 секунд после включения выключателя «Подготовка посадки». Согласование стрелки и индекса УС-И происходит с точностью не хуже, чем 6 км/час. В режиме «Подготовка» на вычислитель (рис. П2) поступает сигнал 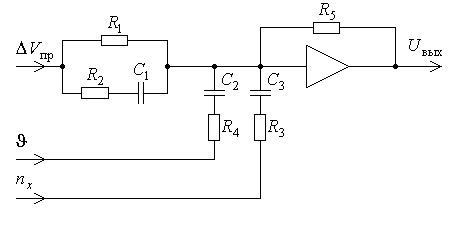 Рис. П2. Цепь формирования закона вычислителя автомата тяги АТ-5 Закон управления секторами газа имеет следующий вид: где Vпр – величина отклонения приборной скорости самолета от заданной; Продолжение прил. Из уравнения видно, что сигнал на выходе вычислителя пропорционален сигналу «V» и его производной, проходящим через фильтр с постоянной времени Tф, первой производной от сигнала тангажа « Усилитель привода управляет двухфазным двигателем-генератором механизма ИМАТ. Вал двигателя механизма ИМАТ вращается со скоростью, пропорциональной величине управляющего сигнала. С тахогенератора двигателя-генератора механизма ИМАТ на вход УПТ усилителя привода поступает сигнал СОС. В режиме «Подготовка» электромагнитная муфта механизма ИМАТ ЭМ1 обесточена, и автомат не управляет секторами газа. Из режима «Управление» автомат переводится в режим «Подготовка» небольшим перемещением (за КСГ) секторов газа при их стопорении. 4.2. Режим «Управление» Режим «Управление» включает в себя два подрежима: «Стабилизация» и «Задание скорости». В режим «Управление» автомат вводится по окончании режима «Подготовка» нажатием кнопки-табло «АТ» на «ПУ-37». При этом кнопка-табло «АТ» загорается, переключатели Г1 и Г2 должны занимать нижнее положение и не гореть. Автомат начинает работать в режиме «Стабилизация». В приборе УС-И фиксируется положение индекса, и при изменении текущей скорости на вычислитель поступает сигнал «V», где происходит его преобразование в соответствии с законом управления и суммирования с сигналами « Подается напряжение на электромагнитные муфты ЭМ1, ЭМ2, и ЭМ3 (рис. 1) механизма ИМАТ, которые замыкают кинематическую Продолжение прил. цепь от двигателя М механизма ИМАТ до его выходных рычагов, соединенных с секторами газа. Вращение вала двигателя передается на сектор газа и приводит к изменению скорости полета. В подрежим «Задание скорости» автомат вводится нажатием кнопки «АТ» на ПУ-37. При задании скорости индекс заданной скорости УС-И начинает перемещаться по шкале в сторону больших скоростей при нажатии переключателя задания скорости в сторону «Больше» и в сторону меньших скоростей при нажатии переключателя задания скорости в сторону «Меньше». В соответствии с этим, в вычислитель поступает сигнал «V», приводящий к изменению скорости полета. Индекс второго УС-И при этом должен подслеживать за индексом первого УС-И с точностью Индекс основного прибора имеет скорость перемещения 15…21 км/час. Когда летчик отпускает переключатель задания скорости, он возвращается в нейтральное положение, и прекращается перемещение индекса заданной скорости. Происходит выход самолета на скорость, установленную пилотом по индексу, и стабилизация этой скорости. 5. Контроль автомата тягиВ автомате предусмотрен контроль исправности вычислителя, ограничителя и привода, контроль активного отказа и контроль отказа питания, контроль изменения Vпр в режиме АЗП и ДЗП при полете по равносигнальной зоне глиссады. Система контроля включается в работу через 8,5…11,5 секунд после включения выключателя «Подготовка посадки». За это время все элементы автомата выходят на номинальный режим, и исключается срабатывание системы контроля из-за больших рассогласований в начальный момент. Окончание прил. Стенд для проверки автомата тяги АТ-5 Стенд для проверки автомата тяги АТ-5 (рис. П3) находится в лаборатории систем автоматического управления и включает в себя следующие блоки пульт автономных проверок ПАП-23 (поз. 1); исполнительный механизм автомата тяги ИМАТ-1-12-2 (поз. 2); пульт (поз. 3); автомат тяги (включает блок связи БС-26 и блок автоматики БА-17) (поз. 8); УМАП (поз. 7). Пульт, в свою очередь, включает в себя: пульт управления ПУ-37 (поз. 6); указатели скорости с индексом задаваемых значений левого и правого летчиков УС-И лев, УС-И прав (поз. 5); комбинированный указатель скорости КУС-1200 (поз. 4). 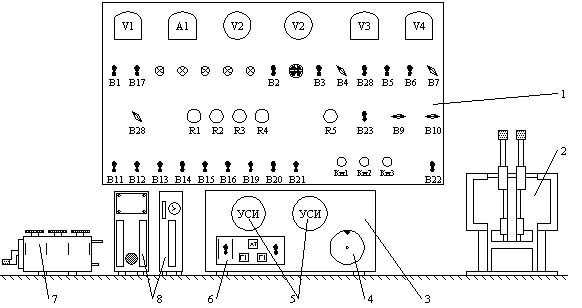 Рис. П3. Стенд для проверки автомата тяги АТ-5 Проверка работоспособности и настройка параметров автомата тяги АТ-5 осуществляется по специальной инструкции, находящейся в лаборатории систем автоматического управления. |