мой курсач. Техническое задание 2 Описание и обоснование разрабатываемой конструкции 3
 Скачать 274.13 Kb. Скачать 274.13 Kb.
|

2. Описание и обоснование разрабатываемой конструкции2.1. Технико-экономическое обоснование конструкцииТемой данной курсовой работы является разработка конструкции исполнительного механизма выдвижного действия. Исходя из заданного ТЗ и схемы в качестве исполнительного устройства будем использовать регулируемый электромеханический привод (ЭМП), широко применяющийся для задания звеньям движения. Такие приводы работают в повторно-кратковременных режимах со сравнительно быстрыми изменениями выходной скорости. Регулируемый ЭМП применяют в установках автоматического управления и регулирования в промышленности, энергетике, специальной технике (авиационной, ракетной, космической); автоматических измерительных приборах, основанных на компенсационном методе измерения; промышленных роботах и манипуляторах; следящих системах дистанционных передач, автоматических прицелах; радиолокационной технике для управления антеннами поиска и слежения за подвижными объектами и т. д. Основные требования к регулируемым ЭМП – это малые инерционность, погрешность; простота конструкции, стабильность характеристик, а также малые масса, габариты, стоимость, высокая надежность. 2.2. Принцип действия изделия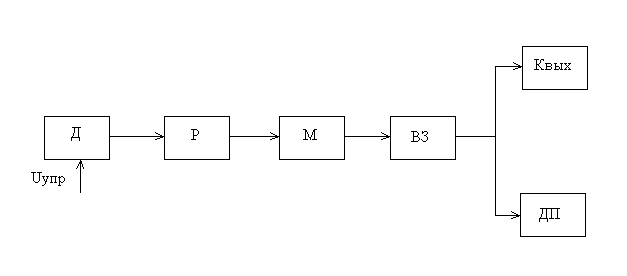 Рис.. Схема разрабатываемого механизма Д – двигатель; Р – редуктор; М – муфта; ВЗ – выходное звено; ДП – датчик перемещения; Квых – обратная связь; Uупр – управляющее напряжение. В общем случае ЭМП состоит из трех основных звеньев: источника энергии (электродвигателя Д), передатчика энергии (редуктора Р) и исполнительного устройства (ВЗ). Помимо этого в схеме имеются дополнительные элементы, необходимые для создания функции регулирования. Муфта М, которая служит для предохранения механизма от перегрузок (при эксплуатации нагрузка может носить случайный характер), что повысит надежность системы, а также для принудительного тормоза, что повысит быстродействие системы. Датчик перемещения ДП служит для преобразования выходной механической величины (хода выходного звена s) в электрический сигнал для контроля выходных параметров. В качестве датчика перемещения в разрабатываемой конструкции будет применен линейный потенциометр, присоединенный к стенке стакана, защищающей выходной вал. Звено Квых служит для преобразования электрического сигнала в форму, подходящую для системы управления, реализованную с помощью силовой электроники. Сигнал от системы управления будет подаваться к двигателю, корректируя характер движения его вала. Помимо этого в редукторе будет реализована функция ограничителя хода выходного вала микропереключателями. Таким образом будет реализована система обратной связи, позволяющая управлять движением выходного звена. 3. Предварительный выбор двигателя привода разрабатываемой конструкцииДля механизма линейных перемещений предварительный выбор двигателя будем производить по номинальной мощности [1]:  , (1) , (1)где  - номинальная мощность двигателя - номинальная мощность двигателя - выходная мощность редуктора - выходная мощность редуктора =1,1 - коэффициент запаса =1,1 - коэффициент запаса - КПД редуктора - КПД редуктораПримем КПД цилиндрического зубчатого редуктора открытого типа  , КПД передачи винт-гайка , КПД передачи винт-гайка  . Тогда КПД всего механизма равен . Тогда КПД всего механизма равен  Расчетное значение выходной мощности:  Вт ВтПо рассчитанной мощности N = 1,38 Вт и рекомендациям ТЗ выбираем двигатель ДПР-52-Ф1-03 с характеристиками (табл. 2): Таблица . Характеристики двигателя ДПР-52-Ф1-03
|